脉冲耦合复值神经网络的全局渐近同步①
2022-03-30 05:37冯靓胡成于娟
西南师范大学学报(自然科学版) 2022年3期
冯靓,胡成,于娟
新疆大学 数学与系统科学学院, 乌鲁木齐 830046
鉴于神经网络良好的自适应学习能力、 智能性及联想存储能力, 近年来在组合优化、 图像处理和安全通信[1-2]等多个方面得到了广泛应用. 随着研究的不断深入, 学者们发现实值神经元的存储能力是有限的, 很难完成对高维信息的存储和处理, 如对称性检测问题和XoR问题[3]. 基于此, 有研究人员将实值连接权重及实值激活函数推广至复数域, 建立了复值神经网络[4-6]. 2009 年, Amin等[7]通过实验进一步证明了单层复值神经网络能够表现出与多层实值网络相当或者更高的性能. 目前, 复值神经网络在图像传输、 设计信号过滤器、 交通信号控制等方面发挥着重要的作用[8-10]. 另外, 为刻画生物神经元或组织之间的交互作用, 由多个神经网络交互而成的耦合神经网络被提出, 并被广泛应用于目标识别、 噪声抑制、 压缩编码、 边缘检测等实际问题中.
耦合神经网络不仅具备人工神经网络的性能, 往往还会演化出比单一神经网络更为复杂的动态行为[11]. 作为一种典型的动力学演化行为, 耦合神经网络的同步近年来得到了广泛关注[11-12]. Liu等[13]针对一类具有固定连通拓扑的耦合神经网络, 利用线性矩阵不等式的方法导出了耦合网络实现指数同步的判定准则. 自此, 结合饱和控制、 事件触发牵制控制等控制方法, 具有固定连通拓扑的耦合神经网络同步问题被大量研究, 得到了许多有意义的同步研究成果[14].
值得注意的是, 在网络节点通讯过程中通信带宽限制、 信道突发故障等因素经常导致网络之间的连接出现中断或切换到另一频率信道的现象, 表明节点之间并不总是在任意时刻都进行信息交互, 网络的拓扑结构也不再是固定连通的. 因此, 在通讯信号不连续、 通讯拓扑不连通的情况下讨论耦合神经网络的同步更具有实际意义. 2016年Chen等[15]提出一类具有不连通拓扑的切换机制, 并分析了复杂网络的渐近同步行为, 该耦合机制仅要求网络节点之间的信息在某些离散时刻进行通讯, 并允许每次切换拓扑可以是不连通的. 基于此, 2021年Chen等[16]结合脉冲耦合机制和事件触发控制, 研究了耦合神经网络的同步问题. 但这些工作主要是围绕实值网络展开讨论, 对具有更强存储能力和更高效信号处理能力的耦合复值神经网络, 如何深入探讨其在脉冲耦合机制下的同步仍是一个亟待解决的难题.
基于上述讨论, 本文探讨一类脉冲耦合复值神经网络的全局渐近同步问题. 主要贡献包括: ①相较于以往的连续耦合神经网络[13-14]和实值切换耦合神经网络[15-16], 本文运用图的序列连通性和Dirac脉冲函数, 提出了一类依赖于节点复值状态的脉冲耦合机制, 它不仅具有更强的信息存储能力和更高效的信息处理能力, 还去除了以往研究中需要网络拓扑结构固定连通的限制性条件, 仅需网络节点在序列连通条件下的某些离散时刻进行信息通讯即可. ②本文采用直接误差方法来讨论耦合神经网络的渐近同步, 有效避免了实际问题中同步态未知或同步态不可微带来的分析困难. 理论结果和数值模拟表明, 当网络节点之间出现通讯间断或信道更新等不连续通讯时, 适当调整网络切换顺序或节点耦合权重也能够实现整个网络的同步.
1 模型描述及预备知识
1.1 符号说明

1.2 模型描述
考虑由N个复值神经网络构成的复杂网络系统, 其模型描述为:
(1)
式(1)中xi(t)=(xi1(t),xi2(t), …,xin(t))T∈Cn表示第i个神经网络的状态向量, 对角矩阵A∈Cn×n表示神经网络的自抑制矩阵,f(xi(t))=(f1(xi1(t)),f2(xi2(t)), …,fn(xin(t)))T∈Cn表示神经网络的激活函数,D∈Cn×n表示神经网络内部连接权重矩阵,I(t)是n维的外部输入向量值函数,Ui(t)刻画了网络节点之间的脉冲耦合机制, 其具体形式为:
(2)
利用Dirac函数性质, 式(1)转化为如下脉冲微分系统
(3)
令
则式(3)转化为:
(4)
下面给出一些相关的定义、 假设和引理.
定义1对图G=(V,ε)及非空点集L⊆V, 称集合N(G,L)={k∈VL|∃l∈L, (l,k)∈ε}为点集L在图G中的邻居节点集.



假设2对任意x,y∈Cn, 存在正常数L使得‖f(x)-f(y)‖≤L‖x-y‖.

2 主要结论
为方便证明, 首先引入如下记号.


(5)
那么, 脉冲耦合复值神经网络式(1)是全局渐近同步的.

对任意i∈V, 由假设1可知

当t∈(tk-1,tk]时, 对任意i,p∈V, 定义eip(t)=xi(t)-xp(t), 由式(4)可知

(6)
从而有
由节点i,p的任意性可得
结合式(4)和定义3可知, 对任意i∈Vk,

∈α(tk)Φk+(1-α(tk))Φ(tk)

由V0是孤立节点集和VT=V可知
结合第二步可得
所以
(7)


那么耦合复值神经网络式(1)是全局渐近同步的.
注2在定理1中, 不连续脉冲切换拓扑下的序列连通性可解释为:t0时刻某一复值神经网络节点V0接收到外来信息, 在t1时刻拓扑结构切换为G1,V0在G1中将信息传递给邻居节点N(G1,V0), 此时信息遍历的节点集为V1=V0∪N(G1,V0). 随后, 在t2时刻拓扑结构切换为G2,V1中的节点在G2中将信息传递给邻居N(G2,V1), 此时V2=V1∪N(G2,V1). 以此类推, 在tT时刻拓扑结构切换第T次时,VT-1在GT中与其邻居N(GT,VT-1) 交换信息, 此时VT=VT-1∪N(GT,VT-1)=V, 通过T次切换实现了整个网络的信息遍历, 但每次切换的网络拓扑并不总是连通的.
注3与文献[14-18]讨论的实值耦合神经网络相比, 本文研究的脉冲耦合复值神经网络具有更强的信息存储能力和更高效的信息处理能力. 在研究方法上, 与传统的Lyapunov方法不同, 本文主要运用直接误差方法和凸组合技巧来分析耦合网络的同步, 理论分析和判定条件更简洁直观.
3 数值模拟与仿真
考虑6个具有双复值神经元的神经网络耦合而成的复杂网络, 其模型为:
(8)
式(8)中xi(t)∈C2,Ui(t)为脉冲耦合策略式(2),f(xi)=(0.7tanh(xi1(t)), 0.7tanh(xi2(t)))T

耦合网络式(8)的脉冲拓扑切换图序列如图1和图2所示, 这里V0={1},V1={1, 2, 3},V2={1, 2, 3, 4, 5, 6}. 由定义3可知, 该图序列是序列连通的, 且T=2.
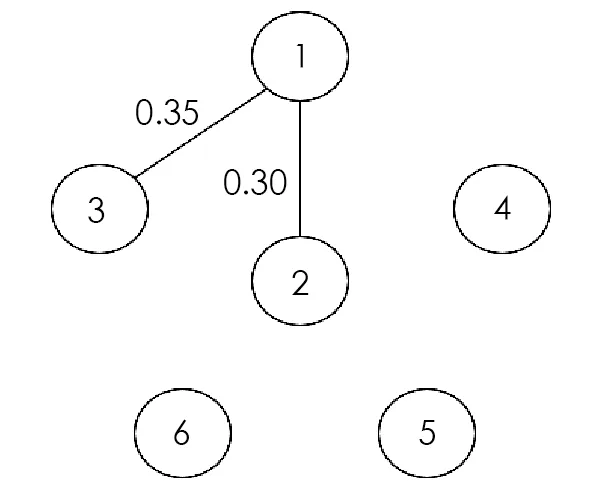
图1 t=t2k-1时的拓扑结构
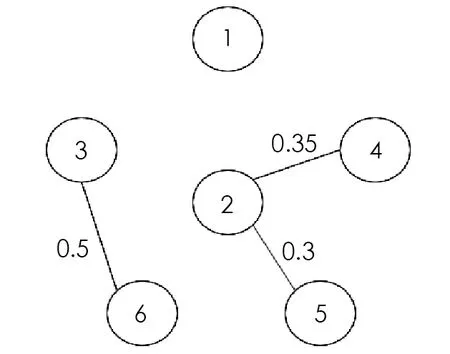
图2 t=t2k时的拓扑结构

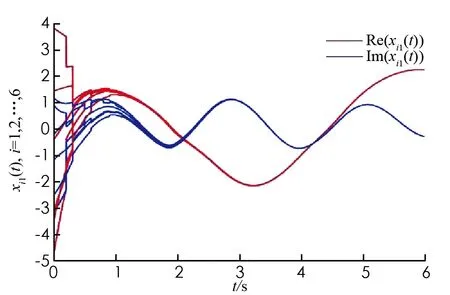
图3 xi1(t)的同步过程
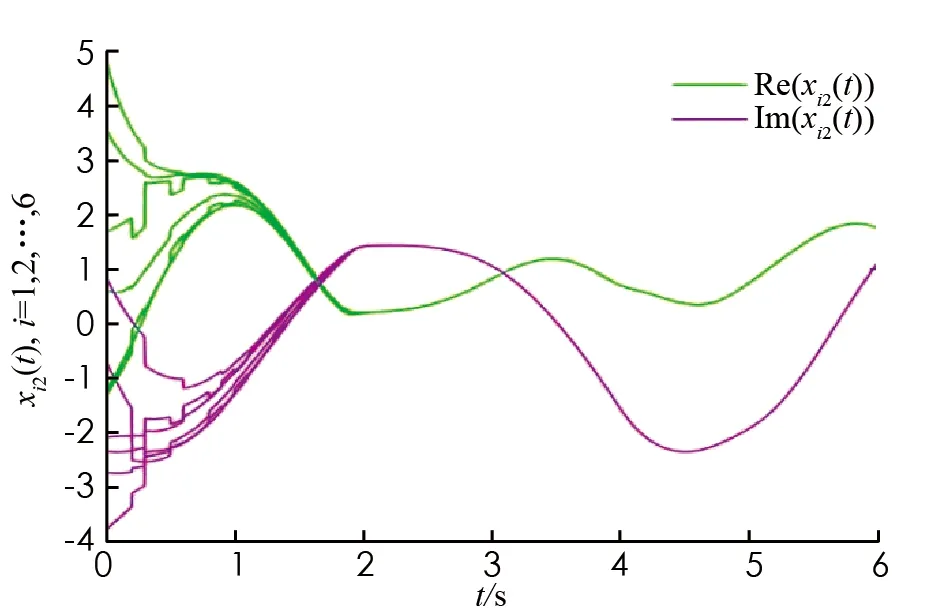
图4 xi2(t)的同步过程
4 结语
本文研究了由复值神经网络通过脉冲耦合构成的复杂动态网络的渐近同步问题. 不同于以往的连续耦合机制, 该网络节点仅在脉冲时刻进行信息交换和拓扑结构的切换. 在序列连通条件下, 基于直接误差法及迭代的思想建立了脉冲耦合复值神经网络渐近同步的判定条件. 结果表明在网络耦合中出现不连续通讯时, 对节点通讯进行适当地限制也能实现网络的渐近同步. 在以后的工作中, 将探讨在脉冲耦合机制下具有随机切换拓扑的脉冲耦合网络的同步问题.
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
辽宁工业大学学报(自然科学版)(2022年4期)2022-09-19
房地产导刊(2021年12期)2021-12-31
北京航空航天大学学报(2021年9期)2021-11-02
有色设备(2021年4期)2021-03-16
电子制作(2019年16期)2019-09-27
制导与引信(2017年3期)2017-11-02
北京航空航天大学学报(2017年10期)2017-04-20
名人传记·财富人物(2016年9期)2016-11-10