
基于DeviceNet现场总线技术的ABB工业机器人与PLC通信的实现
2022-03-29 21:49庞智张廷婷曾令培
机电信息 2022年5期
关键词:通信
庞智 张廷婷 曾令培




摘要:现代工业通常由多个设备共同完成生产任务,控制系统较为复杂,工业机器人作为其中的重要设备之一,在从事复杂工作时需要与PLC和视觉系统协作,这个过程中工业机器人与PLC的通信非常重要。现基于实际生产系统,研究ABB工业机器人与西门子S-1200 PLC通信的实现。
关键词:ABB工业机器人;DeviceNet;西门子PLC;通信
中图分类号:TP242.2 文献标志码:A 文章编号:1671-0797(2022)05-0016-03
DOI:10.19514/j.cnki.cn32-1628/tm.2022.05.004
引言
在现代生产系统中,工业机器人与PLC需要通信协作完成生产任务[1],即工业机器人输出信号给PLC,让PLC控制相关设备驱动机器人前端工具工作。本文主要分析基于DeviceNet现场总线技术的ABB工业机器人与PLC通信的问题。DeviceNet是自动化领域常见的一种网络通信方式,ABB工业机器人基于DeviceNet网络建立与西门子PLC通信的网络。
1 配置DSQC652
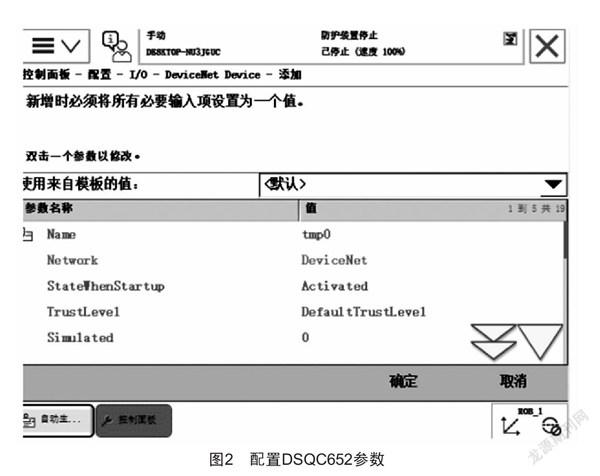
ABB工业机器人常用的标准I/O板主要有5种[2],除了在设置时给它们分配的地址不同以外,它们的配置方法基本相同。本文主要对ABB标准I/O板DSQC652进行分析,该板主要基于DeviceNet网络构建通信模块。DSQC652板具有分布式I/O模块,有16个数字输入和16个数字输出接口,该板安装在ABB工业机器人控制柜里。首先,定义DSQC652板具体操作步骤,进入示教器控制面板,然后进入配置菜单(图1),选中DeviceNet Device菜单,添加模板进入图2。ABB标准I/O板是挂在DeviceNet网络上的,所以要设定模块在网络中的地址。端子X5的6~12的跳线用来决定模块的地址,地址可用范围在10~63,在模板参数里修改参数完成DSQC652板设置。单击选择“使用来自模板的值”行的下拉菜单,选择“DSQC652 24VDC I/O Device”,然后需要设置的参数有I/O板在总线中的地址。
2 配置信号与参数
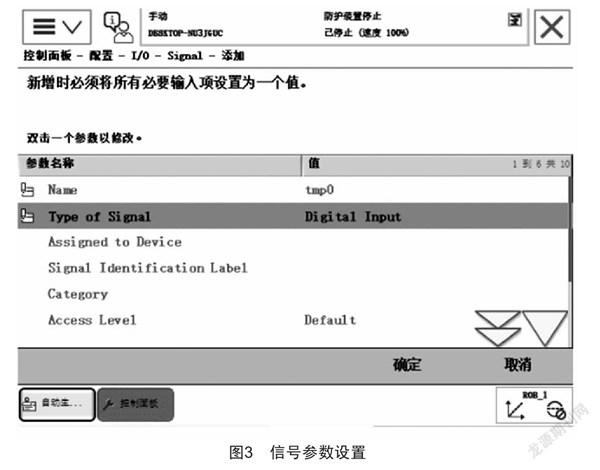
完成DSQC652板设置后,将进行I/O信号设置,设置I/O信号是和PLC建立通信的基础,PLC通过I/O信号和DSQC652板与ABB工业机器人进行数据通信传输。如图3所示[3],在信号配置界面中,有许多系统建立后默认的I/O点,不允许修改,点击“添加”增加信号。在设置输入、输出信号时,它们的地址范围均是0~15。首先进入配置选项里的信号菜单设置输入、输出类型,修改相应参数,完成以后计算机提示需要重启设置。如果有多个信号需要定义,重启多次等待时间较长,那么可以点击“取消”,等待所有信号定义完成后单击“是”按钮重新启动。信号设置完成以后,在ABB菜单中点击选择“输入输出”查看全部信号是否已经设置完成。
在信号建立过程中应注意使用的DSQC652端口和PLC端口地址,建立相应的地址表,如表1所示。机器人通过I/O信号实现与PLC的交互。在设置过程中,PLC连接DSQC652的端口和地址号一定不能出现错误,如果地址设置错误,那么机器人与PLC通信将不能正常工作。
整个机器人示教器设置过程如图4所示。
3 组态西门子PLC
PLC方面采用西门子S-1200 PLC,西门子PLC需要在博图软件中進行组态编程,程序完成后便可以对机器人与PLC进行通信设置[4]。首先在博图软件中选择设备与网络,随后添加新设备,选择控制器型号为西门子1212,如图5所示。在添加了设备以后需要对PLC网络进行设置,电脑与PLC必须在一个网段里面设置相应的IP地址,便于下载和上传PLC程序。设置完成后,点击左边项目树选择程序块,然后进入程序编写。整个程序编写完成后,可以通过ABB工业机器人示教器中输入输出菜单调用查看机器人是否接收到PLC发出的信号,也可以通过博图软件在线查看PLC是否接收到机器人发出的信号。在线路连接好的情况下,作业人员可以设置部分信号完成测试工作,如果测试通信正常,便可以进行进一步的PLC编程。
4 结语
本文详细阐述了ABB工业机器人与西门子PLC进行通信设置的过程,充分利用工业现场总线技术的特点,在通信过程中以DeviceNet现场总线技术为基础进行了信号设置,实际操作验证了本文所述内容的可行性。在通信设置中,应特别注意地址信号等参数设置的过程。基于DeviceNet现场总线技术,ABB工业机器人与PLC通信能够更加快速、便捷地完成。
现代工业中,工业机器人与PLC的通信技术提高了生产线自动化水平,更能发挥工业机器人柔性特质和拓展特质,因此可以预见,通信技术在生产一线中的应用必将不断增加,从而对工业生产发挥更大的作用。
[参考文献]
[1] 向晓汉.西门子PLC工业通信完全精通教程[M].北京:化学工业出版社,2013.
[2] 权宁,纪海宾,詹国兵.工业机器人基础操作与编程(ABB)[M].北京:机械工业出版社,2020.
[3] 叶晖.工业机器人典型应用案例精析[M].北京:机械工业出版社,2013.
[4] 廖常初.S7-1200 PLC编程及应用[M].2版.北京:机械工业出版社,2010.
收稿日期:2021-12-08
作者简介:庞智(1980—),男,四川夹江人,讲师,工程师,研究方向:电气自动化技术。
通信作者:张廷婷(1985—),女,四川隆昌人,硕士,工程师,研究方向:农业工程与信息技术。
猜你喜欢
科技创新与应用(2016年34期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
科学与财富(2016年15期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
中国新通信(2016年16期)2016-10-18
