某多级杆式空气发射系统内弹道仿真与试验研究
2022-03-28 07:37郭锦炎竺伊文王华吉宋顺利王子扬
弹道学报 2022年1期
郭锦炎,竺伊文,王华吉,宋顺利,王子扬
(北京航天发射技术研究所,北京 100076)
本文所研究的某多级杆式空气发射系统正是一种满足低初速的发射试验系统,可以给各种外形的载荷提供一定的初始速度,模拟其运动环境。
作为一种新型的发射方式,多级杆式发射方式能够适应各种外形载荷的发射需求。多级杆式发射方式理论上有大杆先出和小杆先出2种模式,大杆先出更能有效实现,结构更简单可靠,但对内弹道要求更高,本文介绍的发射系统则采用大杆先出的模式。
由于多级杆的发射方式存在多个活塞缸高速冲击的问题,其缓冲方式的选择和缓冲结构的具体设计是发射装置产品设计关心的重点,对高速冲击缓冲给整个发射装置带来的结构安全性问题的分析及弹射动力学分析是发射总体关心的重点。
以空气为动力源的发射系统,虽然能量密度低,体积大,但具有成本低和反复使用便捷等特点,对以空气为动力源的内弹道研究也有很多种方式方法,能量修正途径也较多。
本文介绍的多级杆式空气发射系统的动力源是若干个标准工业气瓶组成的气瓶组,通过时序打开电磁阀供气,从而提供能量。由于采用多级杆大杆先出的模式,对内弹道需求更高,通过以空气为动力源的发射系统研究多级杆式发射方式,更为灵活,可以按内弹道需求提供动力,按要求使多级杆产生规定的速度,有助于试验聚焦多级杆发射方式本身结构件缓冲及发射装置结构安全性的仿真分析研究,对这种新的发射方式的工程应用有很大的帮助。本文将从工程便捷角度进行研究。
1 工作原理简介
多级杆式冷发射示意图如图1所示。
图1 多级杆式冷发射示意图
本文介绍的多级杆式空气发射系统,以高压气瓶组为动力源,气瓶组通过管路和电磁阀与多级杆相连,当电磁阀打开后,高压气通过管路进入多级杆内,高压气体推动多级杆和有效载荷不断加速,直至达到设计速度。多级杆式空气发射系统如图2所示。

图2 多级杆式空气发射系统示意图
2 内弹道建模
2.1 基本假设
多级杆空气冷发射内弹道过程包括了空气的流动、空气膨胀做功、推杆推出、导弹运动等多种物理化学现象。采用集总参数法和空间平均的热力学参数来描述空气的流动和导弹的运动。基本假设:
①空气流动模型。空气服从理想气体状态方程;空气流动为等熵流动;流动的损失通过系数进行修正;推杆的泄漏面积随多级杆的运动变化。
②推杆和导弹运动模型。推杆内的压力达到启动压力后,推杆活塞和导弹瞬间开始运动;且推杆活塞和导弹的运动为轴向一维运动;推杆最外侧一级最早开始运动,此后依次向内扩展;第九级拉出到位后第八级开始运动,此后各级推杆拉出过程中空气作用面积由该级推杆的大端外径计算得出,假设某级推杆推出过程中内级推杆一起运动。
③热散失和次要功模型。热散失等各种形式的次要功采用次要功计算系数进行修正。
2.2 数学模型
根据经典内弹道理论,建立主要方程。
①理想气体方程。
=
②流量方程。
参考经典的相对流量方程,气瓶向多级杆内的气体流动满足如下方程:

式中:为第气瓶(组)流向推杆内的气体质量,1,为第气瓶流向推杆内的修正系数,1,为第气瓶流向推杆的最小截面积,t,为推杆内的平均压力,为第气瓶气体的比热比。

式中:为推杆流向外界环境的气体质量,2,为推杆流向环境内的修正系数,2,为推杆缝隙的等效截面积,为环境的平均压力。
③运动方程。
推杆推动导弹运动过程中导弹、推杆视为一个整体,有如下运动方程:
式中:为第级推杆拉出过程中推杆活塞的最大推力横截面积;为导弹运动的摩擦力;为运动的推杆与未运动推杆的摩擦力;为导弹的质量;为导弹底推的质量;为第级推杆的质量;为重力加速度;为次要功修正系数;为导弹的速度。
④推杆内气体能量守恒方程。

3 试验研究
3.1 试验方案
试验装置主要由原理弹射试验装置(含十级推杆)、弹射斜坡工装架组成,原理弹射试验装置实物照片如图3所示。

图3 试验系统十级推杆现场照片
试验时共两组气瓶组(3×4-35 MPa-40 L),试验时内充23 MPa压缩空气,即24个气瓶直接供气。管路及阀的名义直径为10 mm。气路主要由高压金属软管、电磁阀、安全阀等组成,每一个管路中均有一个手阀和一个电磁阀(型号规格:HTFPJF4600),在布置每个管路的气路时,均保证气路的长短一致,弯头数量和弯头形式一致,若确因布局原因需要调整,则优先调整某一个高压金属软管的长度,不改变管路弯头数量和形式,如图4所示。

图4 试验系统管路及电磁阀现场照片
设计了可编程时序控制器,时序控制器连接市电工作,控制电路工作为24 V直流;共有24路被控电路,单路最大电流为3 A,控制精度不小于10 ms;另有时统输出信号1路,输出24 V阶跃信号;延时通过界面设置,均相对面板开关的触发时刻。通过时序控制器控制每一路电磁阀的开关,如图5所示,具备分时打开电磁阀的功能。

图5 试验系统管路及电磁阀现场照片
试验前对每个电磁阀的响应时间进行测定,时序控制器根据每个电磁阀的响应不同,按照目标控制时刻进行调整,试验时设定每个电磁阀的开启和关闭时刻,使用时由时序控制器进行系统弹射的开关控制,并给出时统信号用于标记测试系统的零时刻,给高速摄像触发信号。
本文介绍的试验研究中将电磁阀同时打开,验设计了3 000 kg的配重,采用5°坡弹射方案,校验内弹道模型的正确性。
3.2 试验结果与分析
本次试验成功实现了3 000 kg配重的弹射任务,配重均落入预先设定好的水坑内。弹射试验的高速摄像照片如图6所示。

图6 弹射试验的高速摄像照片
为了便于工程研究,根据管路布置及特征,宏观修正流动系数。根据以上模型采用四阶龙格-库塔法编制内弹道程序,对试验进行预示计算,通过数值计算得到内弹道压力数据如图7所示。
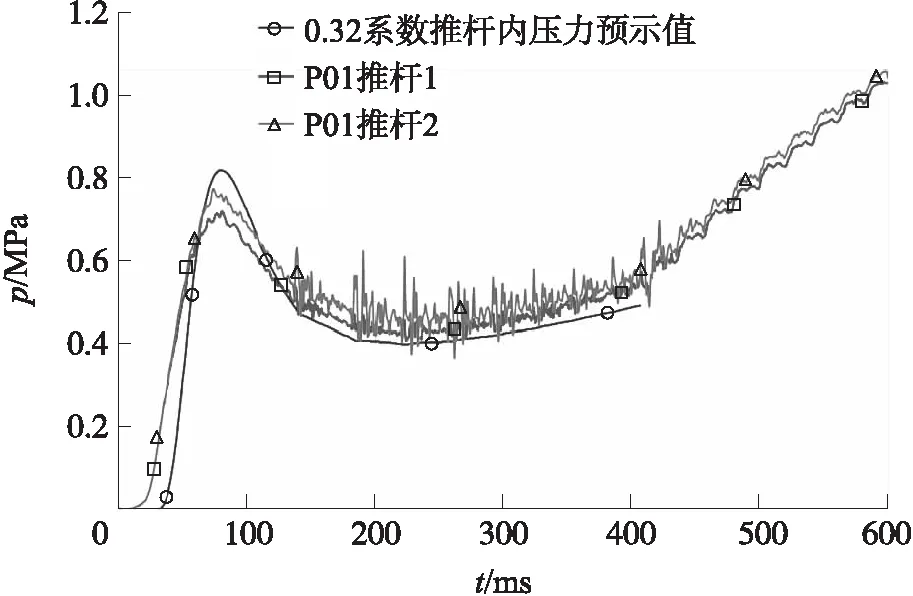
图7 3 000 kg配重斜坡第一次弹射试验推杆内压力实测与预示计算对比曲线
研究中发现:气路中软管的布置会影响流动修正系数,这主要跟软管是否拐弯,拐弯半径的大小有关,流动修正系数的偏差导致内弹道预示时存在约±1m/s的误差,后续研究中需尽可能缩短气路,减少软管使用,确需使用软管得需规范软管的布置;此外需注意气路中可能存在限流作用的环节和部件,使用时需进行控制并保持一致,当气路技术状态一致时,流动修正系数是确定的。此外,特定电磁阀的流动修正必要时可安排专项试验单独测定。
试验研究表明了内弹道模型的正确性,后续可以根据发射的内弹道需求,灵活调整气瓶初始压力及各个电磁阀的开启时间策略,在一定范围内实现特定的弹射内弹道目标。
4 结束语
本文以某多级杆式空气发射系统为研究对象,根据其工作原理,建立了经典内弹道模型,对多组气瓶供气的发射过程进行仿真,并用试验的方法实测压力曲线的变化,通过宏观修正流动系数,计算得到的内弹道结果与实际测量得到的结果基本吻合。计算结果与试验结果吻合较好,所建立的内弹道模型对某多级杆式空气发射系统的研制具有参考意义。
猜你喜欢
弹道学报(2022年3期)2022-10-08
科技研究·理论版(2021年20期)2021-04-20
兵器知识(2020年8期)2020-08-12
科技创新导报(2016年4期)2016-11-19
演艺科技(2016年9期)2016-05-14
中学生数理化·教与学(2014年11期)2014-11-13
中国摄影(2014年8期)2014-11-07
劳动保护(2014年1期)2014-01-02