
音速喷嘴法气体流量标准装置计算机控制系统
2022-03-24 09:24:46李领录张远程安徽省计量科学研究院
上海计量测试 2022年1期
李领录 张远程 / 安徽省计量科学研究院
0 引言
流量标准装置通常按液体和气体分类。液体流量标准装置按检测的原理,分为称重法、容积法及标准表法,气体流量标准装置按检定的原理,分为容积法、标准表法[1]。
目前,我国关于液体流量测量的方法已经基本满足需要,但相应的标准装置技术水平还不尽人意。而气体流量测量还存在不少问题有待解决。包括气体流量计品种不全、准确度不高,特别对大口径、大流量的气体流量计的测量较为困难。要发展气体流量测量仪表,就必须研制和建立能满足测量需求的气体流量标准装置。目前,国内仍有不少流量标准装置用人工控制检定排量、记录数据、计算误差,只有部分科研机构和检定装置的生产厂家使用自动控制系统,但自动控制方法不尽相同。
音速喷嘴是近期发展较快的一种新型气体流量试验装置,又称为临界流流量计。它适用于高压力、大流量气体流量计的检测和气体流量标准的传递。其测量准确度高,可达±0.2%。
临界流文丘里喷嘴具有结构简单、性能可靠、准确度高、无可动部件、维护方便,检定周期长(5 a)等优势,是国际标准推荐使用的喷嘴型式,且成为最近十年来国内外普遍使用的气体流量标准装置[2]。由于临界流文丘里喷嘴的上述特点,大大提高了装置的整体可靠性和量值溯源性。为此,设计了一套音速喷嘴法气体流量标准装置的计算机控制系统。
1 控制系统的设计原则
基于工业控制计算机的自动检定控制系统,不仅要提高量值传递准确性,还要能满足市场上各种类型流量计的检定需要,以适应我国科学技术和国民经济的发展。控制系统设计采用先进的计量技术、计算机技术、信息技术和多媒体技术,稳定、可靠、灵敏地控制设备[3],以达到操作简单、界面生动、功能齐全、准确度高的自动检定目的。
1)稳定性和可靠性:控制系统设计的首要前提。
2)标准性和规范性:控制系统设计采用国际、国家及行业标准,控制系统设计规范化、软件编制规范化、硬件选型规范化、产品规格规范化。
3)先进性和快速性:控制系统采用先进、成熟、稳定、可靠的技术产品,保障其具有快速的检定能力。
4)可维护性和经济性:控制系统的总体结构合理、线路简单、软件模块化、易于维护、故障率低、节约人力财力,具有良好的性能价格比。
2 控制系统构成
2.1 计算机控制部分
计算机控制部分如图1所示。
1)工业控制计算机和操作软件。工业控制计算机通过专用的接口实现与各个控制单元通信,在流量计检定操作软件界面,完成全过程中的检定点流量调节和检定过程控制。
2)脉冲计数与定时器单元:脉冲计数单元采集被检表输出脉冲并累计,定时器单元准确控制检定时间。
3)高精度A/D 转换单元:用于测量输出模拟信号的被检表。
4)多路 I/O 控制单元:控制水环真空泵的启动与停止及不同口径喷嘴的组合,实现流量的自动调节。
5)多媒体部分:由图像采集卡和摄像设备构成,利用计算机的图像采集技术,采集被检表显示流量。
2.2 计算机控制部分数据采集处理过程
气体流量标准装置运行过程中,计算机数据采集是通过上述各个执行单元,将环境中的模拟变量转换为计算机识别的数字变量,通过该变量,计算机控制调节流量,运算结果数据。数据采集可分为两部分,一是标准数据采集,即通过气体流量标准装置计算标准流量;二是采集被检表的实际流量。
3 控制系统软件
根据音速喷嘴法气体流量标准装置的工作原理及硬件系统,并考虑控制系统工作的可靠性,软件采用模块化设计,主要模块有:主程序、中断服务程序、自动检定程序等[4]。
3.1 自动检定程序流程
控制系统在初始化和自检完成后,便可以开始运行检定程序。首先,通过键盘输入并修改各种参数,如设备型号、检定条件等。然后选定具体的检定方案,根据不同的检定方案执行检定任务。每个检定方案程序包括:采样程序、采样控制程序、数据处理程序、显示程序、结果打印程序等。具体的自动检定程序流程如图2所示。
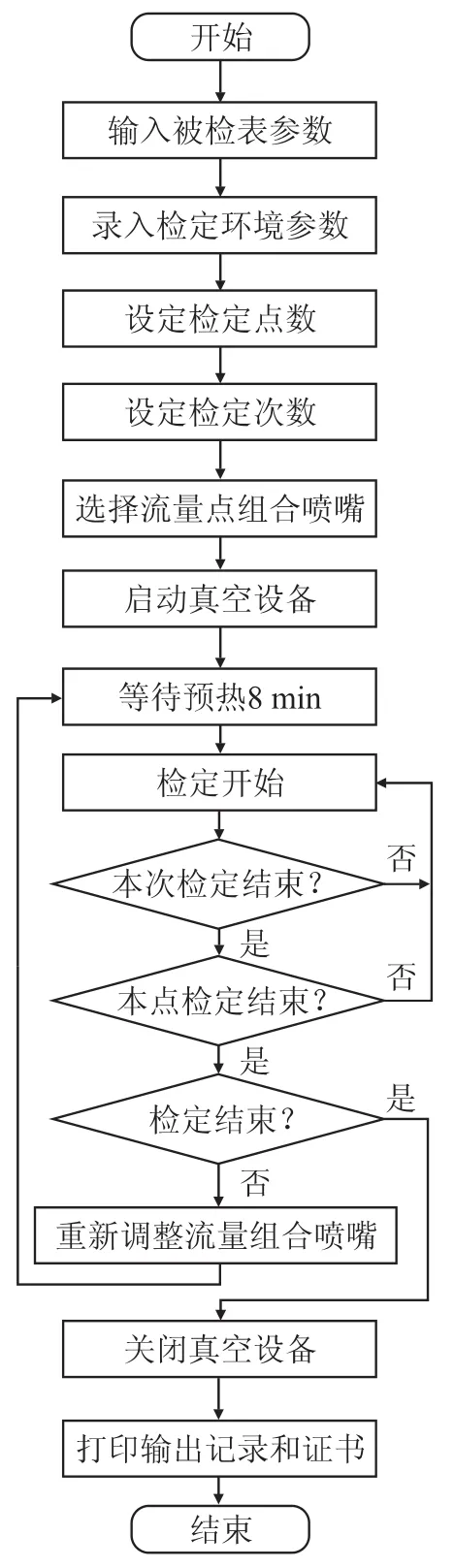
图2 自动检定程序流程
3.2 软件控制系统
气体流量标准装置是在Windows操作系统下,使用 VC++6.0开发的测控软件;在数据的存储、计算和报表生成方面具有很强的灵活性[5,6]。由于控制系统是非线性系统,建立精确模型较为困难,使用结合比例、积分和微分三种环节于一体的控制算法(PID控制算法)整定PID参数,实现对流量检定点的准确控制,并具有很强的抗干扰能力[7,8]。控制系统所使用的模糊控制器的设计方法:首先,确定模糊控制器的输入为二维输入,即把误差e和误差的变化率ec作为模糊控制器的输入,模糊控制器的输出为PID参数的增量值,分别为Kp、Ki、Kd,则PID的参数为
Kp(k)=Kp(k- 1)+Kp
Ki(k)=Ki(k- 1)+Ki
Kd(k)=Kd(k- 1)+Kd
1)比例系数Kp的作用是加快控制系统的响应速度,提高控制系统的调节准确度。Kp越大,控制系统的响应速度越大,调节准确度越高,但容易产生超调,使控制系统不稳定。Kp过小,则会降低调节准确度,使响应速度缓慢,从而延长调节时间,导致控制系统静态、动态特性变差。
2)积分系数Ki的作用是消除控制系统的静态误差。Ki越大,控制系统的静态误差消除得越快,但是Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程中的较大超调。若Ki过小,将使控制系统静态误差难以消除,影响控制系统的调节准确度。
3)微分系数Kd的作用是改善控制系统的动态特性,主要在响应过程中抑制偏差向任何方向的改变,并对偏差变化进行预报。但是Kd过大,会使响应过程中的制动提前,从而延长调节时间,降低控制系统的抗干扰性。
根据偏差e和偏差的变化率ec的状态决定三个参数的取值,例如:e为负偏差较大,ec也为负增大状态。此时,比例系数的作用较大,从而加快调节速度,而积分系数的作用较小,甚至可忽略,从而防止负方向出现饱和积分现象。微分系数的作用可以稍加一些,在不影响调节时间的情况下,起到改善控制系统动态性能的作用。
参考PID参数的工程实践[9,10],根据PID参数Kp、Ki、Kd功能作用,设计模糊PID的模糊控制规则。
首先,对模糊控制器的输入变量和输出变量划分模糊区间,为了模糊控制器设计的简便,将输入和输出变量都映射到[-3,3]区间,统一划分的区间为{-3,-2,-1,0,1,2,3}。考虑到偏差、偏差变化率的正负性,选取7个语言变量的语言值为PB(正大),PM(正中),PS(正小),Z(零),NS(负小),NM(负中),NB(负大),因此,模糊子集可表示为{NB,NM,NS,Z,PS,PM,PB},其中Kp*、Ki*、Kd
*的七个语言值代表的意思为,NB:减少幅度大;NM:减少幅度中;NS:减少幅度小;Z:值不变;PS:增加幅度小;PM:增加幅度中;PB:增加幅度大。采用三角型隶属度函数,是因为其形式简单,计算量小,便于在微控制器上实现。偏差e与偏差的变化率ec的各个隶属函数的参数分别为[-3,-1],[-3,-2,0],[-3,-1,+1],[-2,0,+2],[-1,1,+3],[0,+2,+3],[+1,+3]。
模糊PID的模糊控制规则如表1、表2、表3所示。
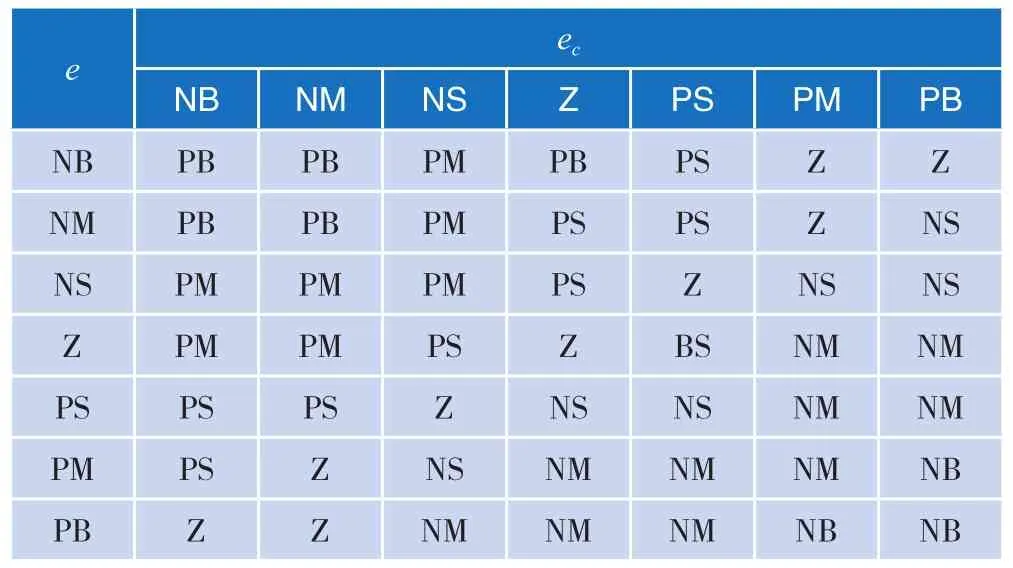
表1 KP*调节规则表
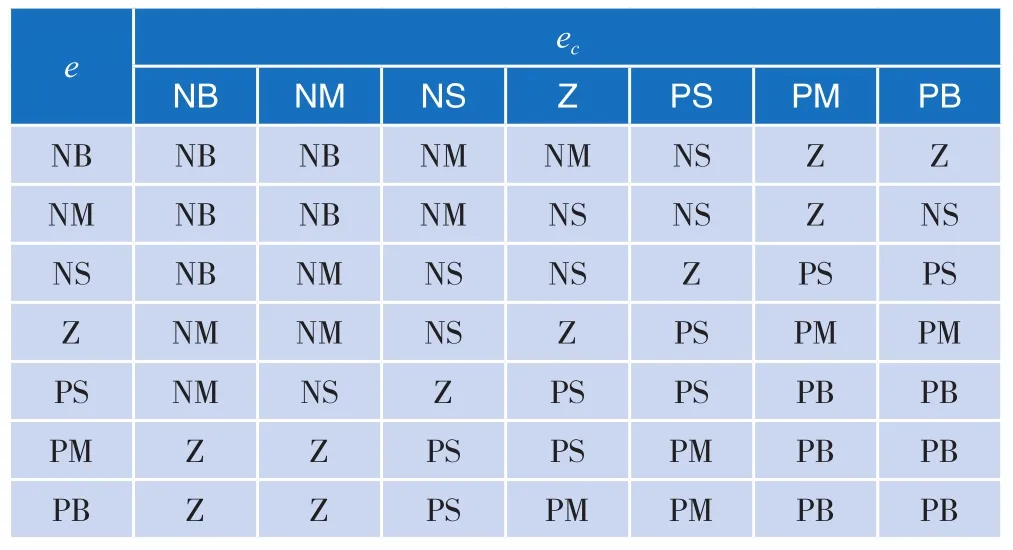
表2 KI* 调节规则表

表3 KD*调节规则表
控制系统能自动校验收发数据,保证数据准确可靠。上位机与下位机的交互,共同完成对整个装置的控制。控制系统启动后,通过界面实时显示现场情况,使操作者对整个装置的运行情况一目了然。检定开始后,控制系统自动完成对装置的控制,实现被检表和标准表的示值同步,同时将采集到的数据存入Access 数据库中。检定完成后系统依据被检流量计类型和相关的检定规程计算,将计算结果以标准报表的形式打印输出。通过该系统查询以往的检定结果,也可以使用Aceesss数据库对检定数据加以维护。
4 结语
音速喷嘴法气体流量标准装置计算机控制系统与其他流量标准装置自动控制系统相比,具有很多优点,PID调节系统能够准确调节检定需要的各个流量检定点流量。如果检定过程中有外界因素干扰,也能很快进行调节,为检定提供了良好的重复性环境。该装置性能稳定、操作简单、界面直观,为气体流量标准装置自动检定系统提供了一条新的可靠途径。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:30
汽车维修与保养(2021年8期)2021-02-16 00:28:20
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
建筑科技(2018年6期)2018-08-30 03:40:54
中国交通信息化(2016年5期)2016-06-06 03:51:43
工业设计(2016年4期)2016-05-04 04:00:15
系统医学(2016年8期)2016-02-20 02:55:08
天津冶金(2014年4期)2014-02-28 16:52:58
机电信息(2014年35期)2014-02-27 15:54:30
