面向嵌入式系统的复杂场景红外目标实时检测算法
2022-03-24 08:52张鹏辉刘志郑建勇何博侠裴雨浩
光子学报 2022年2期
张鹏辉,刘志,郑建勇,何博侠,裴雨浩
(1 南京理工大学机械工程学院,南京210094)
(2 南京博蓝奇智能科技有限公司,南京210014)
(3 上海大学人工智能研究院,上海200444)
0 引言
红外辐射穿透力强,不易被云雾吸收,也不受天气干扰,在阴雨天和夜晚都能正常成像,因而,红外视觉在军事和安防领域有着独特的优势,但是,相较于可见光图像,红外图像有着对比度低,分辨率低,目标细节不够丰富的缺点。当前,针对可见光图像的深度学习目标检测算法已取得丰硕的成果[1-3],虽然这些算法也可用于红外目标的检测,但需要解决红外图像对比度低、目标细节模糊带来的准确率降低的问题,尤其当目标成像背景比较复杂时,需要设法提高算法的抗干扰能力,解决召回率降低的问题。另一方面,深度学习技术在民用领域可选择的部署平台较多,而在军事和安防领域,很多情况下只能部署于嵌入式平台,且对算法推理的实时性有很高的要求。因此,针对复杂场景中的红外目标,研究面向嵌入式系统的实时检测算法很有必要。
在基于深度学习的目标检测算法中,一阶段法能够在检测速度和检测精度之间取得较好的平衡,代表性算法有YOLO[4],SSD[5],RetinaNet[6]等,其中YOLO 系列算法以其推理速度快的优势,常被用来部署于嵌入式系统。文献[7]提出一种基于YOLOv3 架构的汽车目标检测模型,部署于NVIDIA Jetson TX1 嵌入式计算平台上,在线检测速度可达到23 fps。文献[8]基于深度学习技术提出一种面向嵌入式设备的快速人群计数算法,设计了弱算力平台加速网络,对分辨率为640×480 的图像,在cortex-A72 双核ARM 平台上可获得20 fps 的推理速度。总之,已有研究虽然实现了深度神经网络在嵌入式系统上的部署应用,但总体来看,其推理速度依然比较低,还不能满足军事和安防领域对动态目标进行实时检测和跟踪的需要,因此,研究面向嵌入式计算平台,能够兼顾实时性和准确率的网络模型,具有重要的应用价值。
红外图像不像可见光图像有较高的对比度和丰富的目标细节特征,特别是当背景比较复杂,或者存在部分遮挡时,极易引起目标识别率和召回率降低[9]。文献[10]针对复杂背景和低信噪比条件下的红外弱小无人机目标检测场景,改进了一种含空间注意力机制的红外弱小目标检测网络,提升了网络准确率。文献[11]提出了一种改进的YOLOv3 红外末制导目标检测方法,采用预训练思想和Adam 梯度下降算法,提高了模型的平均准确率(Mean Average Precision,mAP),虚警率和漏检率都得到降低,但在PC 平台上的检测速度仅有25 fps。文献[12]基于YOLOv3 网络,提出了一种深度注意力机制的多尺度红外行人检测网络,并结合迁移学习方法进行网络训练,平均准确率比YOLOv3 提高26.74%,适用于多尺度红外行人检测场景。这些研究提升了网络的准确率,但是推理速度比较慢,同样不能满足军事和安防领域的实时性需要。
本文研究面向嵌入式系统的复杂场景红外目标实时检测算法,旨在达到检测速度和平均准确率的良好平衡。选择轻量化网络YOLOv4-Tiny 作为检测框架,利用视觉注意力机制对有效通道进行选择,加强对目标的关注度;采用空间金字塔池化结构对注意力机制加强后的特征层进行不同尺度的特征融合,丰富特征图的表达能力;应用迁移学习方法,进一步提高模型的准确率和召回率;最后在嵌入式计算平台进行网络模型部署,验证所提方法的有效性。
1 方法原理
1.1 YOLOv4-Tiny 算法架构
YOLOv4-Tiny 是YOLOv4[13]的轻量化版本,其网络结构如图1所示。主干特征提取网络CSPDarkNet53_Tiny 由2 层CBL 和3 层CSP 组成,其中,CBL 层由卷积层Conv2d、归一化处理层BatchNorm2d、激活层LeakyReLU 这3 部分组成,CSP 层由4 个CBL 层和一个最大池化MaxPool2d 组成。特征提取网络末端使用两个特征层进行分类与位置回归预测,通过特征金字塔进行特征融合,输出两个检测头Yolo Head。
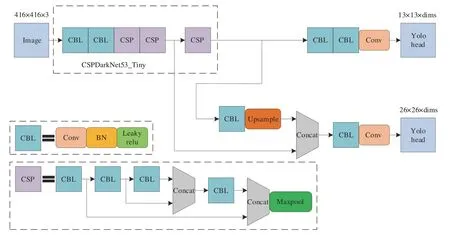
图1 YOLOv4-Tiny 网络结构Fig.1 The network structure of YOLOv4-Tiny
1.2 红外目标检测网络
本文所提红外目标检测网络结构如图2所示。红外复杂场景的目标检测中存在着大量的背景干扰信息,为了加强对目标的关注度,降低背景无关信息的影响,利用视觉注意力机制有效学习到特征图的权重分布,对特征图进行重新标定,加强对目标的关注度,提高模型的检测识别能力。SE[14](Squeeze-and-Excitation,SE)模块,可以学习到通道之间的依赖关系,在通道维度对原始特征进行重新标定,增强网络对有效通道特征的敏感度;CBAM[15](Convolutional Block Attention Module,CBAM),利用特征图的通道和空间信息,在这两个维度计算原始特征图的注意力权重图,然后将注意力权重图赋予原始特征图,达到特征自适应学习的目的。由于红外目标轮廓模糊、图像对比度低,为了加强多尺度特征融合,采用SPP[16](Spatial Pyramid Pooling,SPP)模块,通过窗口大小分别为5、9、13 对特征图进行池化,将多尺度特征进行融合,丰富特征图的信息,提高不同尺度红外目标的识别和定位能力。

图2 YOLOv4-Tiny+SE+SPP/YOLOv4-Tiny+CBAM+SPP 网络结构Fig.2 The network structure of YOLOv4-Tiny+SE+SPP/YOLOv4-Tiny+CBAM+SPP
本文选取了在复杂背景下密集人群的样例图像,利用Grad-CAM[17]对经过注意力机制加强后的特征图Yolo Head(13×13×dims)进行了可视化,如图3所示,采用热力图的形式进行可视化表示,温度越高的地方代表网络越关注的地方,反之代表网络不关注的地方。在图3(b)中是未加入注意力机制的原始网络,可以发现其关注点比较分散,包含了较多的无关复杂背景信息;在图3(c)和(d)中加入注意力机制后,网络可以有效地区分于周围的复杂背景干扰信息,将注意力集中于目标中。可视化结果表明,通过加入注意力机制有效地提高对红外目标的关注度。

图3 Grad-CAM 网络可视化结果Fig.3 Grad-CAM network visualization results
2 实验与结果分析
算法的评价指标采用标准的PASCAL VOC,即平均准确率mAP,用于实验对比和分析。
2.1 数据集
实验采用FLIR 公司发布的公开红外数据集[18]。该数据集是采用红外热像仪在天气为晴到多云的加利福尼亚州圣巴巴拉市街道和公路上,时间为11月至次年5月期间的日间(60%)和夜间(40%)进行采集的。红外分辨率为640×512,标注类别为人、汽车、自行车、狗和其他,由于狗和其他类别的数量占比非常少,为了避免由于类别数量的严重不平衡对算法评估产生不必要的影响,因此对数据进行了预处理,去除了狗和其他类别,最终得到用于算法评估的3 类目标的红外数据集,其中,训练集和验证集为7 859 张图片,测试集为1 360 张图片,各类别数量分布如图4所示。

图4 训练集与验证集(左)和测试集(右)中不同类别数量分布情况Fig.4 Quantity distribution of different categories in training and validation sets(left)test set(right)
由于FLIR 红外数据集是基于车载光电设备,在公路行驶场景下,昼夜进行采集的,因此拥有着复杂背景、部分遮挡、密集目标、不同尺度的特性,部分红外和可见光图像如图5所示。四种场景会相互包含多种特性,以其最突出的特性作为场景特性,场景(a):夜间条件,由于复杂背景的影响,易造成目标漏检问题;场景(b):白天条件,背景与目标温度差异较小,并存在目标之间相互遮挡,极易产生识别定位不准确、漏检问题;场景(c):白天条件,大量密集重叠的目标,产生较多的漏识别问题;场景(d):夜间条件,场景中存在着尺度不同的目标,出现目标识别定位不准确问题。因此,需要在该红外数据集上进行算法的改进,以解决定位不准确、漏识别问题。

图5 四种不同场景下的红外和可见光图像Fig.5 Infrared and visible images of four different scenes
2.2 实验
算法模型采用深度学习框架PyTorch,利用Python 语言进行实现。实验训练平台采用台式计算机,系统为Ubuntu18.04.5 LTS,CPU 为i7-9700K,GPU 为GeForce RTX 2080Ti,内存大小为32 GB,CUDA 版本为10.2。
为了保证实验结果的有效性,采用的训练超参数均保持一致。一批图片的数量设置为64 张,初始化学习率设置为0.001,使用Adam 梯度下降算法,学习率优化策略采用余弦退火算法。数据增强除了采用传统的图像随机翻转、裁切、缩放、色域变换、加入随机噪声外,使用了马赛克数据增强方法。
2.2.1 注意力机制对比实验
对原始网络YOLOv4-Tiny 和加入不同的注意力机制模块后重新设计的网络YOLOv4-Tiny+SE 和YOLOv4-Tiny+CBAM,在训练集和验证集上进行训练120 轮后,在测试集上进行测试,注意力机制对比实验结果如表1所示。

表1 注意力机制对比实验结果Table 1 Results of attentional mechanism ablation experiment
由表1 结果中可以看出,增加了注意力机制,由于整个网络的训练参数量略微增加导致模型推理速度有所下降,相较于YOLOv4-Tiny,增加SE 模块后检测速度从232 fps 下降至226 fps,减少6 fps;增加CBAM 模块后检测速度从226 fps 下降至215 fps,减少17 fps。在检测性能方面,加入了两种注意力机制后,召回率分别提升8.85% 和9.15%,较大地改善了自行车和人两类的AP;但准确率有所下降,分别下降2.34% 和3.04%。实验结果表明,视觉注意力机制能够对有效通道进行选择,应用在FLIR 红外数据集中,有效地提升召回率和平均准确率。
2.2.2 空间金字塔池化对比实验
上节实验结果表明,设计的视觉注意力机制网络可以有效地提升mAP。本节中,通过加入空间金字塔池化结构SPP 模块对注意力机制增强后的特征图进行全局特征和局部特征的融合,扩大了特征图的感受野,进一步丰富特征图的表达能力,以提高目标的识别和定位准确度,解决误识别问题。与未加入SPP 模块的网络进行对比,空间金字塔池化对比实验结果如表2所示。

表2 空间金字塔池化对比实验结果Table 2 Results of space pyramid pooling ablation experiment
由表2 结果中可以看出,加入SPP 模块后,所设计的两种网络对每个类别的AP 均有提升。YOLOv4-Tiny+SE+SPP 与YOLOv4-Tiny+SE 相比,召回率提升2.9%,准确率提升0.19%,平均准确率提高2.38%;YOLOv4-Tiny+CBAM+SPP 与YOLOv4-Tiny+CBAM 相比,召回率提升2.56%,准确率提升0.68%,平均准确率提高了2.5%。改进的最优网络模型YOLOv4-Tiny+CBAM+SPP 相较于原始网络YOLOv4-Tiny,在检测速度上,从232 fps 下降至202 fps,减少30 fps;在检测精度方面,mAP 从57.78%上升至64.50%,提升6.72%。实验结果表明,通过加入空间金字塔池化模块和注意力机制后,所设计的网络在检测速度小幅下降的情况下,可以有效提升红外目标检测的平均准确率。
2.2.3 迁移学习对比实验
迁移学习得到的预训练模型有较好的网络初始化权重,可以提高网络的收敛速度。本实验中,在VOC07+12 数据集上对网络进行预训练,然后加载主干特征提取网络的权重,在FLIR 红外数据集上进行微调训练,与未进行迁移学习的对比实验结果如表3所示。

表3 迁移学习对比实验结果Table 3 Results of ablation experiments on pre-trained models
由表3 结果中可以看出,通过加入预训练权重策略,可以较大地改善了自行车和人两类的检测准确率。与未加入预训练策略的网络对比,YOLOv4-Tiny+SE+SPP 和YOLOv4-Tiny+CBAM+SPP 通过加入预训练权重策略进行训练后,准确率分别提高1.72%和3.24%,召回率分别提高8.39%和10.7%,mAP 分别提高8.41%和9.03%,各项指标均有明显地提升。实验结果表明,迁移学习是一种较优的训练策略,在FILR红外数据集中,预训练得到良好的初始化权重对模型的收敛速度和模型收敛后的平均准确率均有提升。
2.2.4 嵌入式模型部署实验
本文嵌入式计算平台选择华为的Atlas 200 DK 进行网络模型部署实验。华为Atlas 200 DK 上搭载了昇腾310 AI 计算芯片,其中包含2 个DaVinci AI Core 和8 个A55 Arm Core,半精度(FP16)上最高可以达到11 TFLOPS,典型功耗为20W。
由于在嵌入式端采用了半精度加速推理策略,会对网络权重进行量化,导致网络的准确率有所变化。在本节实验中,针对网络的推理速度和准确率进行对比实验,将原始网络YOLOv4-Tiny 和所设计的两种网络YOLOv4-Tiny+SE+SPP 与YOLOv4-Tiny+CBAM+SPP 部署于华为Atlas 200 DK 嵌入式计算平台并进行推理测试,嵌入式模型部署对比实验的结果如表4所示。

表4 嵌入式模型部署对比实验的结果Table 4 Experimental comparison results of embedded model deployment
由表4 结果中可以看出,相比于在台式计算机GPU 计算资源2 080 Ti,采用嵌入式昇腾310 AI 计算芯片时,网络的推理速度大幅降低,网络的平均准确率略有变化。在嵌入式计算平台上,与原始网络YOLOv4-Tiny相比,所提最优网络YOLOv4-Tiny+CBAM+SPP 在多方面的性能有着明显提升:在平均准确率方面,从57.60%提升至73.54%,提高了15.94%;在召回率方面,从40.57%提升至63.46%,提高了22.89%;在推理速度方面,从82 fps 下降至71 fps,下降了13.41%,但依然可以达到71 fps,满足实时检测。实验结果表明,YOLOv4-Tiny+SE+SPP 在嵌入式平台可以达到78 fps 的实时检测速度和69.96% 的平均准确率,YOLOv4-Tiny+CBAM+SPP 在嵌入式平台可以达到71 fps 的实时检测速度和73.54%的平均准确率,达到了检测速度和平均准确率的良好平衡,满足嵌入式平台的实时目标检测需求。
2.2.5 网络的性能对比
3 类检测目标在不同网络上的P-R 曲线,如图6所示,从图中可以看出3 类目标的AP 均有提升,其中,类别bicycle 的AP 值有大幅的提升,类别person 和car的AP 值有一定的提升。与台式计算机GPU 计算平台的网络对比,在含有昇腾310AI计算芯片的嵌入式平台上,网络的P-R 曲线略微有所变化,平均准确率略微变化。

图6 不同类别在不同网络上的P-R 曲线Fig.6 P-R curves of different categories on different networks
2.3 结果分析
四种复杂场景的检测结果如图7所示,采用Grad-CAM 在不同网络中的可视化结果如图8所示。从检测结果中可以看出,相较于原网络,所提的两种网络可以有效提高检测能力;从可视化结果中可以看出,通过加入注意力机制和空间金字塔池化结构,可以有效增强网络对目标的关注度。场景8(a):与YOLOv4-Tiny相比较,改进后的两种网络可以有效解决复杂背景干扰问题,提高了召回率;场景8(b):YOLOv4-Tiny+CBAM+SPP 相较于YOLOv4-Tiny+SE+SPP 和YOLOv4-Tiny,在识别数量和定位精度方面中明显占优势,说明了注意力机制CBAM 比SE 在该场景下,检测效果更佳;场景8(c):改进后的两种网络相较于YOLOv4-Tiny,有效地提高召回率,其中YOLOv4-Tiny+CBAM+SPP 表现更佳;场景8(d):改进后的网络可以准确定位尺度不同的目标、识别出遮挡的目标。
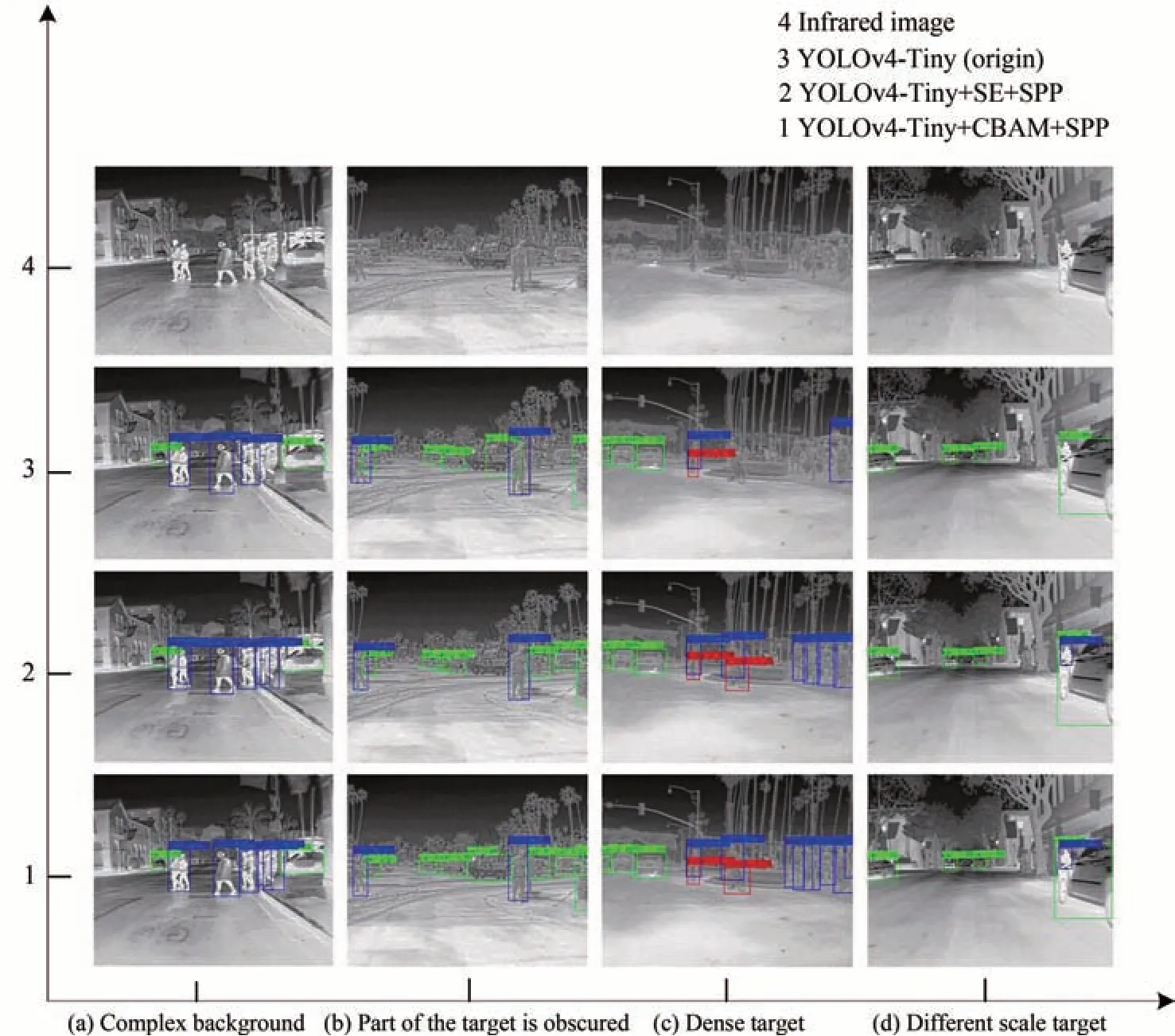
图7 不同模型检测结果Fig.7 Detection results of different models

图8 Grad-CAM 在不同网络中的可视化结果Fig.8 Grad-CAM in different networks visualization results
3 结论
本文提出两种基于YOLOv4-Tiny 的改进网络:YOLOv4-Tiny+SE+SPP 和YOLOv4-Tiny+CBAM+SPP,通过融入视觉注意力机制,增强网络对有效特征层的关注度;通过添加SPP 模块,对经过注意力加强的特征层进行多尺度特征融合,进一步丰富了特征图的表达能力;利用Grad-CAM 在改进的网络中的进行可视化分析,显示改进后的网络可以有效地提高对目标的关注度。实验结果表明,改进的两种网络相较于原网络YOLOv4-Tiny 在检测性能方面有较大地提升:在平均准确率方面,YOLOv4-Tiny+SE+SPP 提升了13.93%,YOLOv4-Tiny+CBAM+SPP 提升了15.75%;在召回率方面,YOLOv4-Tiny+SE+SPP 提升了20.14%,YOLOv4-Tiny+CBAM+SPP 提升了22.41%;在PC 平台上的检测速度,YOLOv4-Tiny+SE+SPP 达到了212 fps,YOLOv4-Tiny+CBAM+SPP 达到了202 fps。将两种网络模型部署于含有昇腾310AI计算芯片的Atlas 200 DK 嵌入式平台上,YOLOv4-Tiny+SE+SPP 和YOLOv4-Tiny+CBAM +SPP 的推理速度分别可以达到78 fps 和71 fps,mAP 分别达到69.96%和73.54%,能够兼顾实时性和准确率,可满足红外目标在嵌入式平台的实时检测需求。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
环球时报(2022-05-23)2022-05-23
航天返回与遥感(2022年1期)2022-03-09
健康之家(2021年19期)2021-05-23
健康之家(2021年19期)2021-05-23
金桥(2021年4期)2021-05-21
医学食疗与健康(2021年27期)2021-05-13
健康体检与管理(2021年10期)2021-01-03
读者·校园版(2014年4期)2014-05-14
图书馆界(2013年5期)2013-03-11