适用于学生自主实践的机械臂式3D打印机的研制
2022-03-24 21:56田建涛左中鹅邢爱民巴宇婷姜旭
时代汽车 2022年5期
田建涛 左中鹅 邢爱民 巴宇婷 姜旭
摘 要:针对目前高等学校使用的成品3D打印机在学生自主实践时出现的直观性差、人机比高的问题,提出了一款适用于高校学生自主实践的机械臂式3D打印机。该3D打印机的整体框架采用全开放式的机械系统,硬件控制系统采用大学生熟知的Arduino主控板,软件控制系统采用完全开源的Repetier-host软件、cura软件和Arduino IDE软件。该3D打印机组成元件一部分由学生自制,一部分选用通用电子元件,成本控制在1000元左右,从而保证实践课程中3:1的人机比。
关键词:自主实践 机械臂式 3D打印机 开放式机械系统 Arduino
Development of Robot Arm 3D Printer Suitable for Students' Independent Practice
Tian Jiantao,Zuo Zhonge,Xing Aimin,Ba Yuting,Jiang Xu
Abstract:Aiming at the problems of poor intuition and high man-machine ratio of the finished 3D printer used in colleges and universities in students' independent practice, a manipulator 3D printer suitable for college students' independent practice is proposed. The overall framework of the 3D printer adopts a fully open mechanical system, the hardware control system adopts the Arduino main control board familiar to college students, and the software control system adopts the completely open source repeater host software, cura software and Arduino IDE software. Some components of the 3D printer are self-made by students, and some are general electronic components. The cost is controlled at about 1000 yuan, so as to ensure the 3:1 man-machine ratio in the practical course.
Key words:autonomous practice, manipulator, 3D printer, open mechanical system, Arduino
1 引言
随着我国工业和信息化部《增材制造产业发展行动计划》的提出,3D打印机已被广泛应用到各行各业中。为此,越来越多的以培养应用型、技术技能性人才为目标的高等学校在现有工程实践教育的基础上增设了3D打印机类实践课程,有条件的学校还购置了成品3D打印机,建立了增材制造实验室,但仍有部分学校因资金问题,仍以观看线上视频来代替现场操作。
2 高等学校3D打印机类实践课程的特点
為了调查高等学校3D打印机类实践课程的特点,项目组成员走访山西省的应用型、技术技能型高等学校,发现此类学校开展3D打印机类实践课程的主要目标是培养学生的实践动手能力;运用的教学方法是以问题为导向、以学生为中心的项目式教学;培养模式为模拟学科竞赛的常见组队形式,即人机比为3:1,分别负责3D打印机的机械、电子、软件部分;课程内容为认识3D打印机、设计3D打印机、制造3D打印机;教学流程包含集体学习理论基础和现场分组制造实物两个环节,具体过程如下:
(1)老师为学生讲授3D打印技术以及3D打印机的工作原理;(2)老师为学生讲授及演示3D打印机的设计流程、制造过程、编程控制、调试及安全注意事项;(3)学生分组完成收集信息、设计方案,各小组互相评价并将最优方案报送老师;(4)老师检查各小组方案的可行性,项目实施,最终研制出3D打印机;(5)总结整个项目过程,并为下一个项目做准备。
3 组装式3D打印机在高等学校实践课程中的优势
目前高等学校学生使用的3D打印机仍然是由校方从生产厂家成品采购而来。这样的3D打印机用到实践课程中,会导致以下两个问题:
(1)为了避免学生因误操作而损坏3D打印机,生产厂家往往采用封闭式机械系统和按钮式软件操作界面,导致学生无法直观学习3D打印机的设计、制造及调试过程;(2)为了保证3D打印机的使用寿命,往往引入高端技术,导致机器价格昂贵,普遍在1万元以上,人机比无法满足教学要求3:1。
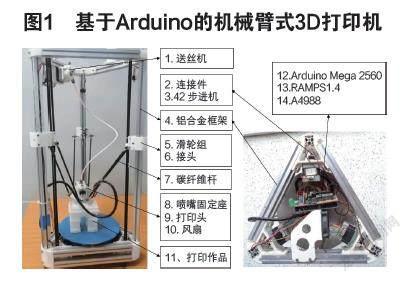
针对以上问题,项目组成员研制了一款适用于高等学校学生自主实践的机械臂式3D打印机(如图1所示),它的优势如下:
(1)采用全开放式机械系统,让学生可以直观的看到3D打印机工作时各构件之间的运动关系和力传递,便于掌握3D打印机的工作原理,为后期自主设计作准备;(2)该打印机的各元件全部采用通用件或标准件,学校只需按元件清单批量采购,制作成本可控制在1000元左右,从而保证了3:1的人机比。(3)采用大学生熟知的Arduino单片机和Arduino IDE编程软件,让学生可以根据所需功能自主编写控制程序;(4)由于该3D打印机的硬件部分是由学生自主装配的,软件部分也是由学生自主编写的,所以维修过程可由学生自主完成,大大减少了维修成本。
综上所述,仅从高等学校3D打印机类实践课程的需求考虑,项目组研制的适用于学生自主实践的机械臂式3D打印机要优于生产厂家研制的成品3D打印机。
4 机械臂式3D打印机的设计方案
4.1 全开放式机械系统
由熔融沉积成型技术(FDM)原理可知,打印3D模型需要3D打印机的喷头能够在X、Y、Z三个方向上精准定位,这对各元件的安装精度有一定要求。因此,如何在保证打印精度的前提下,实现便于学生直观学习的全开放式机械系统是组装式3D打印机的设计重点和难点。
目前市场上的FDM型3D打印机机械框架多采用矩形盒式结构、矩形杆式结构和三角爪式结构,这三种结构形式各有优缺点。项目组成员以便于学生自主实践的全开放式机械系统为设计背景,在打印精度和安装容易度之间取平衡点后确定出最佳机械系统方案。它将可能影响打印精度的42步进电机、滑轮组全部安装在三根自带滑槽导轨的铝合金框架上,即能满足打印精度又方便学生自主安装。
项目组成员设计的组装式3D打印机机械系统主要由支撑部分、传动组部分和执行组部分组成。其中(1)支撑部分的结构形式采用正三棱柱,由铝合金框架4和PLA连接件2通过直接嵌入连接,再加以螺丝固定,即能保证高速打印对结构刚度的要求,又能保证机器的轻量化要求。支撑部分采用开放式框架,打印超高3D模型时,可通过增加铝合金框架的高度来满足,大大提高了其适用范围。(2)传动组部分由3、42步进电机;5、滑轮组;6、接头;7、碳纤维杆;8、喷嘴固定座;皮带组成。为了保证3D打印机的加工精度,采用机械臂式机械传动,即在正三棱柱框架上建立三套独立的互为120°的传动系统,这样可以准备的将控制软件输出的三个滑块的直线运动转换成打印头的空间坐标。各零件的安装步骤为先将42步进电机安装在正三棱柱底座的三个连接件上,再通过皮带将42步进电机与三个侧棱上移动的滑轮组连接,最后通过接头和碳纤维杆将滑轮组与喷嘴固定座相连接。(3)执行组部分是将送丝机8、打印头9、风扇10导管组成。送丝机由另一台固定在正三棱柱顶端连接件的42步进电机提供,将打印耗材通过导管从打印头上方送入。在打印头外安装风扇,对导管头进行散热。
4.2 硬件控制系统
Arduino作为一种开源硬件,已成为我国中学生学习机器人编程的首选,为此,项目组成员选用Arduino Mega 2560主控板12搭载RAMPS1.4扩展板13和A4988电机驱动板14组成3D打印机硬件控制系统的核心部件,用它来控制3D打印机的运动控制模块、人机交互控制模块等硬件模块。(1)在核心部件中,Arduino Mega 2560是采用USB接口的核心电路板,具有54路数字I/O口(其中16路可作为PWM输出),16路模拟输入,4路UART接口,一个16MHz晶体振荡器,一个USB口,一个电源插座,一个ICSP header和一个复位按钮,主要作用是接收软件控制系统中PC(上位机)生成的G代码,并以此来控制RAMPS1.4扩展板、驱动A4988电机驱动板,进而实现42步进电机的步进。(2)运动控制模块是将笛卡尔空间坐标转换成三个滑块的直线运动,从而使3D打印头按照预设轨迹进行打印。(3)人机交互控制模块中,通过SD卡读取三维模型并将其主要参数显示在触摸屏上,操作人员可根据实际情况设置当前模型的坐标原点、打印头的温度、风扇的速度等打印参数。待打印开始后,触摸屏实时显示打印状态、当前温度等信息。
4.3 软件控制系统
项目组成员研制的3D打印机的软件控制系统仍采用PC端(即上位机)和单片机(即下位机)联合工作的方式运行。(1)PC端(即上位机)的开发需要接合已完成的机械结构系统和硬件控制系统,为此,在Repetier-host(调试及打印软件)源码的基础上对其进行了二次开发,在Cura(切片软件)源码的基础上对其进行了二次开发,并以上两个软件可以无缝衔接,最终实现将三维模型参数精准的转换成单片机可识别的控制参数,同时还能实时接收单片机传回的动态反馈信息。(2)单片机(即下位机)的处理器核心是安装了基于Arduino IDE软件开发的固件Marlin的ATmega 2560芯片,它在3D打印机中相当于大脑,不仅要接收PC端传来的打印三维模型所需的G代码指令,还要将其转化为打印机各配件相应的执行动作,从而保证打印机的精确、稳定的完成复杂的打印工作。
5 结语
随着3D打印机的广泛应用,将来会有更多的学生加入到3D打印机类的实践课程中去,这就对实践设备在开放式机械系统、开源性控制程序以及单机价格方面提出了更高的要求。这样一来,项目组研制的适用于自组装式3D打印机相比生产厂家出售的成品3D打印机的优势就会越来越突出。
基金项目:本文系2019年山西省高等学校教学改革创新项目““金课”视域下的创新创业教育体系机制探索”(项目编号:J2019255)和2017年山西省高等学校教学改革创新项目“独立学院大学生创新创业机器人及实践平台建设与应用研究”(项目编号:J2017149)的研究成果。
参考文献:
[1]徐海璐.基于机械臂的3D打印机控制系统研究[J]. 机械工程师,2021(5):9-10.
[2]倪笑宇.基于Arduino的3D打印机设计开发[J].河北建筑工程学院学报,2019(1):141-144.
[3] 蔡团团.基于Delta并联机械结构的3D打印机研究[J].制造技术与机床,2017(6):57-61.
[4]李琴琴.电子工艺实践教学创新探索[J].创新创业理论研究与实践,2019(22)24-25,28.
[5]刘鲁刚.3D打印机的设计与制作[M].北京:电子工业出版社,2020.09.
[6]齐卫.项目式教学过程与效果评价[J].河北师范大學学报(教育科学版),2020(6):119-121.
[7]张利成.浅谈3D打印技术与工业发展[J].中国电气工程学报,2019(29).
猜你喜欢
老年博览·上半月(2021年3期)2021-03-30
当代工人(2020年8期)2020-05-25
读者·校园版(2020年10期)2020-05-19
电脑爱好者(2020年1期)2020-04-28
创新作文(1-2年级)(2017年12期)2018-04-17
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
CHIP新电脑(2015年10期)2015-10-15
微型计算机(2009年23期)2009-06-01
电子世界(2004年6期)2004-07-27