小腿肌肉状态改变对踝关节本体感觉的影响
2022-03-23 10:08杨蕊菲刘子晗徐步轩杨茂伟
中国医科大学学报 2022年3期
杨蕊菲,刘子晗,徐步轩,杨茂伟
(中国医科大学附属第一医院 1.康复医学科;2.骨科,沈阳 110001)
本体感觉包括身体各部分对身体其他部分的位置觉和运动觉,对帮助人体实现平衡和运动至关重要[1]。踝关节本体感觉是平衡控制的重要组成部分,对身体摇晃程度的感知比视觉或前庭输入更加敏感[2]。并且在日常生活和大多数运动中,踝关节-足复合体是唯一接触地面的部位。本体感觉主要通过肌肉、关节、皮肤和肌腱中的机械感受器,传递给中枢神经关于运动和位置的信息[3]。其中肌梭是主要的本体感受器,是与肌肉长度和动态肌肉拉伸有关的受体[4],关节周围肌肉状态可能会影响关节本体感觉。肌梭具有触变性,即肌梭内肌纤维对运动和位置的敏感性受肌梭外肌肉先前的收缩和长度变化的影响[5]。因此,关节外肌肉收缩或长度变化会对关节本体感觉造成影响。之前的研究[6]多关注局部肌肉疲劳对踝关节本体感觉的影响,极少有研究探讨关节的本体感觉与肌肉收缩和长度变化的关系。本研究通过足匹配试验,探讨拉伸和收缩干预后小腿肌肉状态对踝关节本体感觉的影响,进一步研究踝关节本体感觉的影响因素。
1 材料与方法
1.1 研究对象
选取健康男性志愿者20名,均为沈阳市某高校在校大学生。要求纳入的研究对象无明显本体感觉功能障碍,近期无运动损伤发生。所有研究对象均被详细告知研究程序并签署知情同意书。研究对象的平均年龄为(24.90±2.36) 岁,平均身高为(180.55±3.50) cm,平均体质量为(71.25±6.32) kg。
1.2 仪器
使用英国伯明翰大学研究开发的踏板仪器(图1),通过足匹配试验评估踝关节本体感觉,已有研究[7]采用该仪器以英国大学生为研究对象成功进行了一系列相关足匹配试验。足匹配试验的原理为在消除平衡需要的前提下,模拟日常站立状态,进行双侧踝关节角度匹配试验。受试者赤足向后倚靠在一块从垂直方向向后倾斜22°的板子上,同时双足分别被放置在一个单独的电动踏板上。踏板可以通过以杠杆连接的两个直线电机独立旋转(电机型号:XTA3810S;英国科普利运动系统有限公司),踏板的旋转轴与踝关节共线,每个踏板均安装位置感受器。试验目的是通过比较试验踝足匹配角度和双侧踝关节角度绝对匹配误差,探讨踝关节本体感觉的影响因素。
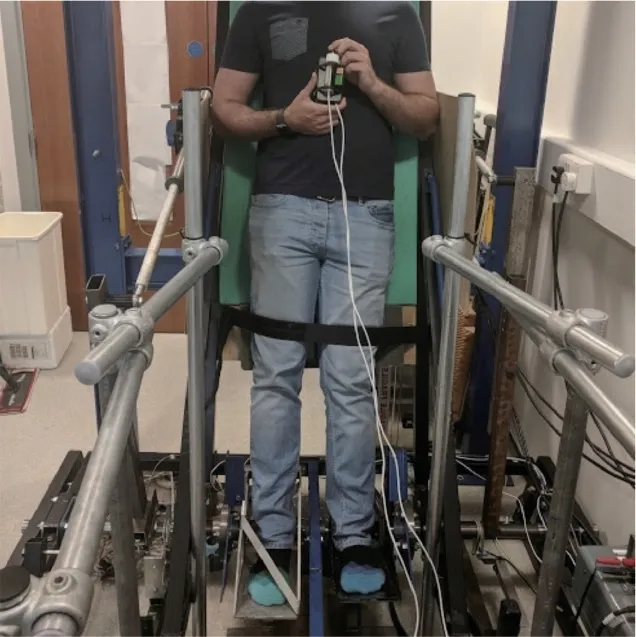
图1 试验装置Fig.1 Experimental set-up
1.3 足匹配试验
1.3.1 小腿肌肉干预方式:以右足为参考足,采用对照、拉伸、收缩3种方式干预右小腿肌肉(小腿三头肌、腓肠肌和比目鱼肌)。对照:受试者在足匹配试验前不进行任何肌肉状态干预。拉伸:足匹配试验前,受试者在指导下将右足放在一个15°的楔形木块上,使足背屈,保持30 s,同时受试者靠着背板站立,以拉伸右小腿肌肉。收缩:足匹配试验前,受试者右足最大跖屈站立30 s,左足悬空,扶手用来保持平衡并非承重,以收缩右小腿肌肉。在每个受试者的试验中,3种干预方式随机出现。
1.3.2 足匹配试验:干预处理后,受试者在蒙眼状态下立即进行足匹配试验。右踝被动移动至5个预设的目标角度(-6°、-3°、0°、3°、6°) 中的一个,其中正值代表背伸,负值代表跖屈,见图2。0°为踏板垂直于背板。这些目标角度基本涵盖了人在静止站立时,足踝运动的范围。在提示音提示右足已达到最终位置后,受试者利用一个手持旋钮控制左足踏板至受试者认为与右足一致的匹配角度,之后按下确认按钮,电脑记录此时左踝的停止位置角度,反映足匹配角度,同时触发新的试验。
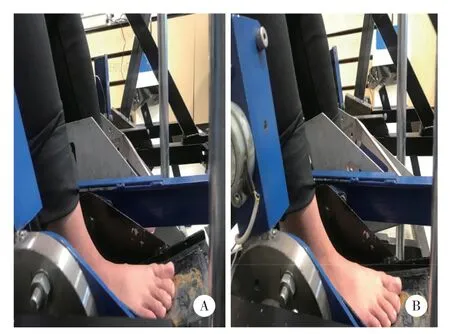
图2 参考足移动方向Fig.2 The moving directions of the reference foot
每次试验中目标角度均以随机顺序出现,每个目标角度均测量5次,取5次测量平均值作为每个目标角度的对应足匹配角度。每种干预方式进行25次试验,3种干预方式随机出现,即每位受试者共进行75次足匹配试验,组成一组完整的足匹配试验。以受试者左侧踝足匹配角度和各目标角度时双侧踝关节角度绝对匹配误差(即足匹配角度与设定目标角度的绝对差值) 反映踝关节本体感觉水平。
1.4 统计学分析
采用SPSS 23.0软件进行统计分析。足匹配角度和双侧踝关节角度绝对匹配误差结果用±s表示。3种肌肉干预状态下的左侧踝足匹配角度和双侧踝关节角度绝对匹配误差的比较采用双因素重复测量方差分析,采用Greenhouse-Geisser法进行矫正,当交互作用有统计学意义时,进行单独效应分析,当交互作用无统计学意义时,进行主效应分析。P<0.05为差异有统计学意义。
2 结果
2.1 左侧踝足匹配角度
采用双因素重复测量方差分析方法,判断随着目标角度的变化3种小腿肌肉干预状态对受试者足匹配角度的影响。结果表明,受试者足匹配角度未出现显著的肌肉状态×目标角度交互作用[F(2.543,48.322)=2.569,P> 0.05]。受试者足匹配角度出现显著的肌肉状态主效应[F(2,38)=41.290,P<0.001],对3种小腿肌肉干预状态下的足匹配角度进行两两比较,受试者小腿肌肉在拉伸干预后,足匹配角度显著低于对照状态下和收缩状态下的足匹配角度(P< 0.001),收缩状态与对照状态相比足匹配角度趋势相似,差异无统计学意义(P> 0.05)。3种肌肉状态下,不同目标角度对受试者足匹配角度的影响有显著主效应[F(1.145,21.761)=245.142,P<0.001],两两比较发现,不同目标角度间受试者足匹配角度的差异均有统计学意义(P< 0.001)。见表1。
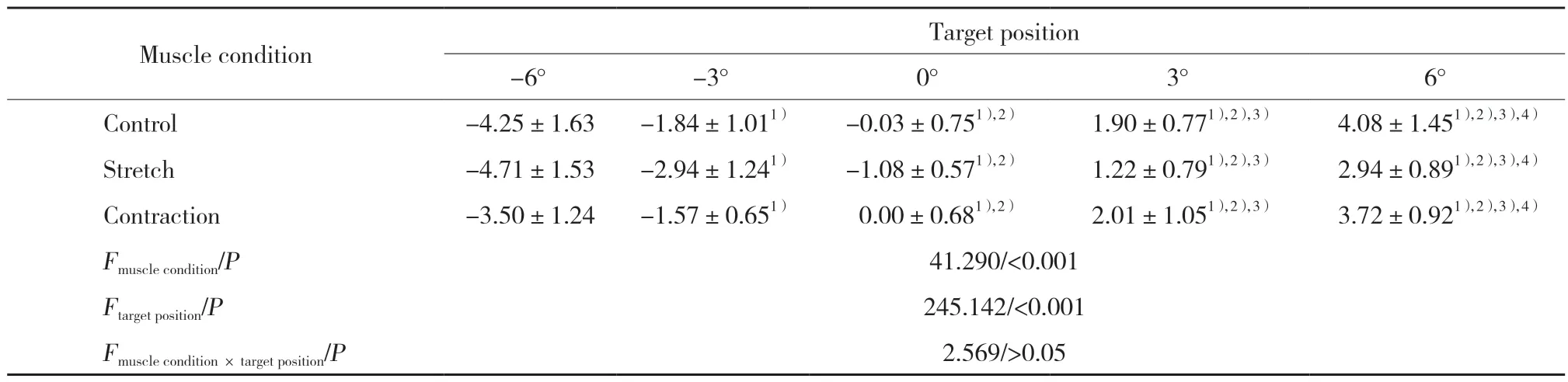
表1 3种小腿肌肉干预状态对左侧踝足匹配角度的影响(°)Tab.1 The effect of three calf muscle conditioning exercises on the left foot matching angle(°)
2.2 双侧踝关节角度的绝对匹配误差
采用双因素重复测量方差分析方法,判断随着目标角度的变化3种小腿肌肉干预状态对双侧踝关节角度绝对匹配误差的影响,绝对匹配误差值越大,表示踝关节本体感觉水平越差。结果显示,肌肉状态×目标角度的交互作用对双侧踝关节角度绝对匹配误差有显著影响[F(3.746,71.174)=11.456,P<0.001],因此对肌肉状态和目标角度进行单独效应分析。
当目标角度分别为-6°、0°、3°和6°时,3种小腿肌肉干预状态下对双侧踝关节角度绝对匹配误差的单独效应均有统计学意义[F(2,38)=10.335,P<0.001;F(1.505,28.603)=7.131,P< 0.01;F(2,38)=7.856,P<0.01;F(1.522,28.920)=14.560,P< 0.001],在4个目标角度下,经两两比较,小腿肌肉拉伸干预状态与对照干预状态相比,差异均有统计学意义(P< 0.05),而小腿肌肉收缩干预状态与对照干预状态相比,差异均无统计学意义(P> 0.05)。
在小腿肌肉对照干预状态下,不同目标角度对双侧踝关节角度绝对匹配误差的单独效应有统计学意义[F(2.192,41.657)=17.391,P< 0.001]。经两两比较,在小腿肌肉对照干预状态下,目标角度为-6°和-3°时比较,差异值为0.85°(P< 0.01) ;目标角度为-6°与0°时比较,差异值为1.66°(P< 0.001) ;目标角度为-6°与3°时比较,差异值为1.11°(P< 0.001) ;目标角度为-3°与0°时比较,差异值为0.82°(P< 0.01) ;目标角度为6°与0°时比较,差异值为1.45 °(P< 0.01) ;目标角度为6°与3°时比较,差异值为0.90°(P< 0.01)。表明在对照干预状态下,目标角度为-6°时踝关节本体感觉显著好于目标角度为-3°、0°和3°时,目标角度为-3°时踝关节本体感觉显著好于目标角度为0°时,目标角度为6°时踝关节本体感觉显著好于目标角度为0°和3°时。在小腿肌肉进行拉伸干预后,不同目标角度对双侧踝关节绝对匹配误差的单独效应有统计学意义[F(2.614,49.668)=28.733,P< 0.001]。经两两比较,在小腿肌肉拉伸干预状态下,目标角度为3°与-3°时比较,差异值为0.77°(P< 0.05),目标角度为3°与0°时比较,差异值为0.75°(P< 0.001),目标角度为6°与-6°、-3°、0°、3°时比较,差异值分别为1.30°、2.01°、1.20°和1.25°(P< 0.001)。表明在拉伸干预状态下,目标角度为3°时踝关节本体感觉显著好于目标角度为-3°和0°时,目标角度为6°时踝关节本体感觉显著好于其余4个目标角度。当在小腿肌肉收缩干预状态下,不同目标角度对双侧踝关节角度绝对匹配误差的单独效应均无统计学意义(P> 0.05)。见表2。

表2 3种小腿肌肉状态下双侧踝关节角度的绝对匹配误差(°)Tab.2 The average matching error of bilateral ankle joint angles under three calf muscle conditioning exercises(°)
3 讨论
本研究发现,与对照状态相比,小腿肌肉在拉伸干预后踝关节匹配角度显著降低,而在收缩干预后踝关节匹配角度无显著变化,即小腿肌肉拉伸状态对踝关节本体感觉有显著影响,而收缩状态对踝关节本体感觉无显著影响。
拉伸干预导致受试者踝关节本体感觉明显偏倚,受试者感觉其足踝角度比目标角度更跖屈,这可能与拉伸干预使小腿肌肉松弛有关。研究[8]指出,在缓慢的拉伸过程中,肌梭纤维内稳定的横桥被分离,并形成新的长度不同的横桥,而当肌肉恢复到一个较短的初始长度时,肌梭纤维会松弛,影响肌梭自放电水平,进而影响肌梭对肌肉长度和关节位置的感知。有研究[9]通过前臂位置匹配试验探讨肘关节的本体感觉灵敏度,其结果也支持这一结论。本研究发现,在拉伸干预后,目标角度为跖屈方向时,参考足的匹配误差向背伸方向偏倚,目标角度为背伸方向时情况则相反。既往关于肘关节本体感觉的前臂匹配试验[10]解释了这一现象,在参考臂移到目标角度的过程中,一旦参考臂停止移动,肌梭就会发出测量参考臂长度的信号,而测量信号既包括在目标角度产生的信号,也包括参考臂在移动到目标角度过程中产生的信号,因此高于实际目标角度产生的信号,导致指示臂与参考臂过早发生匹配。
与拉伸干预相比,小腿肌肉收缩干预对踝关节本体感觉的灵敏度影响甚微。因为在肌肉收缩过程中,肌纤维主动产生横桥以弥补预先存在的肌肉松弛,一旦肌肉放松,这些增加的横桥就会紧绷,具有较高的自放电水平,即能够更好地向中枢神经传输肢体位置信号[5]。本研究结果与先前关于肘关节本体感觉的前臂匹配试验结果不同[11],这种差异可能是因为上肢和下肢的差异,也可能是由于干预方法不同。本研究中受试者以被动部分负重的姿势站立,同时采用踮足尖姿势使小腿肌肉充分收缩并缩短。然而在跖屈收缩过程中,拮抗肌胫骨前肌可能会出现协同收缩,这会抵消小腿肌肉收缩对本体感觉的影响。有研究[12]证实,当小腿肌肉和胫骨前肌交替拉伸后,小腿肌肉状态不会对踝关节本体感觉造成过多影响,这与本研究结果类似。
本研究发现,3种不同肌肉干预状态对受试者双侧踝关节角度绝对匹配误差无显著的单独效应,这可能是因为在对照、收缩和拉伸干预后,绝对匹配误差值非常接近。但这并不代表3种干预状态下绝对匹配误差值是一样的,因为肌肉状态和目标角度对绝对匹配误差的大小有显著的交互作用(P<0.05),表明不同小腿肌肉状态和不同目标角度的组合对绝对匹配误差也有影响。此外,3种干预方式均表明,当目标角度为0°时匹配误差最小,即当目标角度为0°时踝关节本体感觉最佳,因为人们安静站立时大多数时间会保持一个垂直角度。之前也有研究[5]证实这一现象,当手臂在身体前方时,手会自动对齐,并且如果要求受试者在蒙眼状态下指向参考方向时,受试者倾向于左手移到左边,右手移到右边。关于手臂在身体前方会自动匹配的研究[13]表明,人类大脑建立了一种特殊的神经机制,以确保在日常生活中在一些重要姿势时肢体匹配的精确性。
本研究具有以下局限性。首先,受试者靠背板被动站立,目的是评估小腿肌肉在没有运动输出的前提下,不同干预方式对踝关节本体感觉的影响。这虽然能够很好反映肌肉周围机械传感器(肌梭)的表现,但与日常生活中的站立明显不同,正常的站立是不停地主动调整小腿肌肉长度以适应身体的摇晃[14]。其次,本研究未对受试者的优势侧进行评估。有研究[15]表明,相较于身体的优势侧,身体的非优势侧会有更好的本体感觉灵敏度。因为大部分人的优势侧均为右侧,所以本研究使用左足为参考足以使结果更具代表性。但在后续研究中,需要关注不同优势侧对于踝关节本体感觉的影响。
综上所述,与收缩状态相比,小腿肌肉拉伸状态显著影响踝关节本体感觉;不同目标角度与不同小腿肌肉状态对踝关节本体感觉有显著交互作用;踝关节角度为0°时,踝关节本体感觉最佳。
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
齐鲁艺苑(2022年1期)2022-04-19
发明与创新·大科技(2021年3期)2021-04-30
哈哈画报(2021年10期)2021-02-28
家庭医学(2017年8期)2017-09-06
人人健康(2017年8期)2017-05-02
红领巾·萌芽(2015年5期)2015-06-16
图书与情报(2013年1期)2013-11-16
卷宗(2013年6期)2013-10-21