
多电压等级直流电网的仿真技术与协调控制策略研究
2022-03-22 06:57宋远见张哲任
浙江电力 2022年2期
郑 眉,陈 骞,宋远见,徐 政,张哲任
(1.国网浙江省电力有限公司电力科学研究院,杭州 310014;2.浙江大学 电气工程学院,杭州 310027)
0 引言
随着大规模可再生能源并网以及输电系统互联成为当前研究热点,针对多电压等级直流电网的电磁仿真模型建立以及协调控制策略的研究也愈发重要。电磁仿真模型影响着直流电网的仿真精度和速度,目前MMC(模块化多电平换流器)是高压输电场合下用于直流电网的主流拓扑,现有文献主要集中在对MMC的仿真中。文献[1-2]提出了AVM(平均值模型),该模型将MMC桥臂在交流侧等效为受控电压源,在直流侧等效为受控电流源和等效电容,从而模拟MMC 的外特性,具有仿真速度快的优点;但是AVM忽略了功率器件的开关动作和电容电压纹波的影响,缺失了对谐波特征和换流器内部特性的模拟。文献[3-5]提出了详细的DEM(等效模型),所有子模块的电力电子开关在DEM中都被进行等效,在稳态运行过程中,电力电子开关的外特性无异于一个开关;这种等效方式虽然可以精确地对全部子模块电容的充、放电过程进行仿真模拟,但是对于大规模MMC直流电网的仿真耗时长、效率低。虽然目前已有文献提出各种MMC 的电磁暂态仿真模型,但是对于直流电网中换流器和直流变压器需要采用哪种详细程度的仿真模型,并没有明确的规定。
目前,关于多电压等级直流电网的协调控制保护策略研究基本集中在多端直流系统的稳态电压控制和直流电网的直流故障处理策略上。文献[6-7]研究了适用于多端柔性直流(以下简称“柔直”)电网的电压裕度控制策略,其基本思路是设定一个备用的定电压主控站,该备用主控站的定电压指令值与当前主控站的定电压指令值不同;根据当前主控站是整流站还是逆变站,备用主控站的定电压指令值与当前主控站的定电压指令值之间具有一个正的或负的裕额。多点直流电压控制指的是任何时刻至少有两个换流站对直流电压有控制作用,主要包括纯下垂控制和分段下垂控制。文献[8-9]研究了直流电网的纯下垂控制策略,其中文献[8]在定功率控制换流站引入直流电压比例-积分下垂控制环,可以提升多端系统的换流站故障穿越能力;文献[9]提出了根据期望输送功率计算并修正下垂控制器的功率参考值方法,使得各换流器均能按预期功率传输。目前很少有文献针对含直流变压器的多电压等级直流电网的协调控制策略进行研究。
直流变压器是多电压等级直流电网的核心装备之一。本文首先介绍MCT(模块化组合式直流变压器)的工作原理,针对现有仿真技术的缺陷,提出一种MMC桥臂高等效性模型;针对含直流变压器的多电压等级直流电网,研究并提出相应的协调控制策略;最后通过PSCAD仿真,验证了所提桥臂高等效性模型以及协调控制策略的有效性。
1 直流变压器的原理
传统大容量直流变压器包括多种拓扑,如双侧有源桥变换器、移相控制全桥变换器、谐振式直流变压器和MMC直流变压器[10]。其中MCT具有占地面积小、波形质量高和输送容量大的特点,在高压大容量输电场合下具有较大的应用潜力[11]。
图1所示为MCT 的拓扑结构。图中蓝色和红色所示分别为MCT的低压阀和高压阀,数目分别为2M个和2N个,MCT中的各MMC结构参数完全相同。在MCT内部,各MMC的交流侧分别通过电容电感串联支路和交流断路器连接到交流母线Bcom(图1中未画出交流断路器)。
当MCT连接不同电压等级的直流电网时,其副边连接低压直流电网,原边连接高压直流电网,2 个直流电网的电压分别为Ehigh和Elow,且Ehigh>Elow。通常原边的直流电压Ehigh恒定,而副边的直流电压Elow需要MCT 的控制。以高压向低压直流电网传输直流功率P为例,P可以分成两部分,一部分直流功率首先通过高压阀逆变成交流功率,在交流母线Bcom上汇聚后,再通过低压阀整流成直流功率,流入到副边的直流低压电网,这部分功率经过了DC/AC/DC变换;另一部分直接流到直流低压电网,这部分直流功率未经过DC/AC/DC变换。
2 桥臂高等效性模型的仿真方法
MMC的电磁仿真速度决定了含直流变压器的多电压等级直流电网的仿真速度和精度,因此MMC电磁仿真方法极为重要。电磁暂态仿真的实现途径包括电容支路的离散化伴随模型、基于分块交接变量方程法的MMC 快速仿真方法以及MMC 子模块/桥臂的等效模型。关于电容支路的离散化伴随模型和MMC 的分块交接变量方程法,已经有较多的文献介绍。本节提出了MMC 桥臂高等效性模型,并且分别在非闭锁状态和闭锁状态下对桥臂等效模型进行了详细的推导。
2.1 桥臂高等效性模型
本节在开关函数法的基础上,建立了桥臂等效模型,级联N个子模块的桥臂可以等效为1个子模块结构的桥臂等效电路,如图2所示。
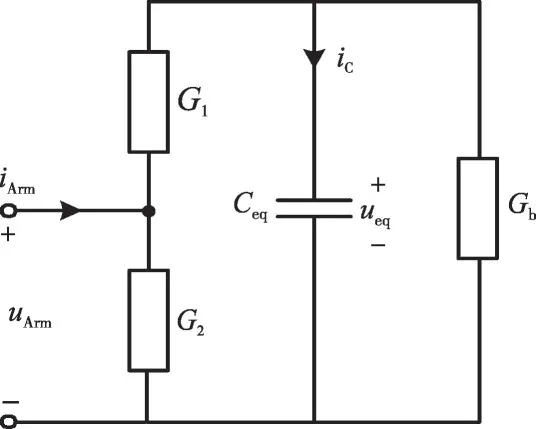
图2 桥臂等效模型
图2 中,iArm和uArm分别是桥臂电流和桥臂等效电路电压;Gb=(Gb0/N),Gb0为子模块电容电压的均压电导,其值非常小;G1和G2分别表示桥臂开关组的大通态电导和小阻态电导,G1=1/(NRon),G2=1/(NRoff);Ron和Roff分别为桥臂单个子模块的通态电阻和阻态电阻;Ceq为桥臂等效电路的等效电容;ueq为桥臂输出电压;iC为子模块电容电流。由参考文献[11]可知,它们的关系为:
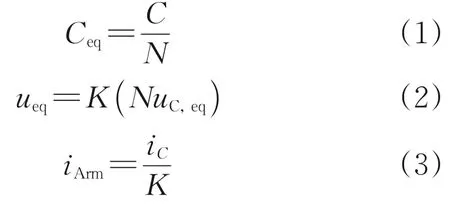
式中:C为子模块电容;uC,eq为子模块电容电压;K为桥臂的平均开关函数。

式中:Si为桥臂中第i个子模块的开关函数,其值取1表示该子模块投入,取0表示该子模块切除。
下面分别对稳态和闭锁2种情况下的桥臂等效模型进行离散化处理和电路简化,以得到最终的MMC电磁暂态计算模型。
2.2 稳态时桥臂等效模型
图3是稳态时桥臂等效模型。首先采用梯形积分,对图3(a)中的桥臂等效电容Ceq进行离散化,得到如图3(b)所示的Norton 等效电路。其中Norton等效电导GC,eq和等效电流源JC,eq(t)整体等效桥臂等效电容Ceq,它们均是时间的函数,如式(5)、

图3 稳态时桥臂等效模型
式(6)所示。

式中:h为电磁仿真时间步长。
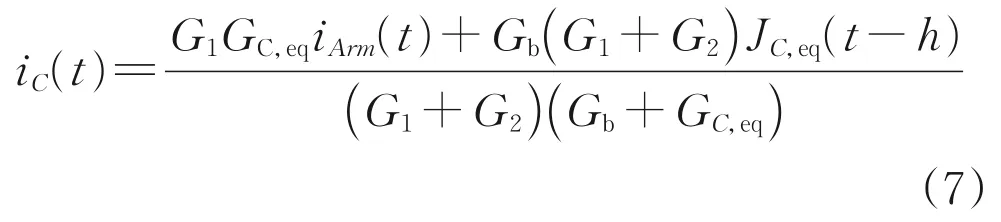
t时刻的电容电流iC(t)由式(7)计算而得,用于在每个仿真步长中反解更新子模块电容电压。
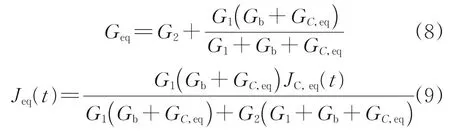
将离散化后的桥臂电路进行Norton 等效,得到图3(c)。Geq和Jeq(t)分别为Norton 等效导纳和等效电流源,由式(8)、式(9)计算得到。
MMC 电路被分解为6 个桥臂子网络和1 个不包含桥臂的非桥臂子网络。采用分块交接变量方程法[11]将图3(c)的桥臂Norton 等效电路插入到桥臂,即可对整个MMC 进行快速求解,如图3(d)所示。
2.3 IGBT(绝缘栅双极型晶体管)闭锁时桥臂等效模型
由于T1和T2的反并联二极管D1和D2均为静态元件,其离散化伴随模型与原始模型一致,因此在桥臂等效模型离散化处理时仍然保留2个反并联二极管的原始形式。保留反并联二极管的好处是可以利用电磁暂态仿真软件本身来处理二极管的开通和关断时的断点问题,而不需要用户直接介入对二极管的模拟。IGBT闭锁条件下的桥臂等效模型和电流电压正方向如图4所示。
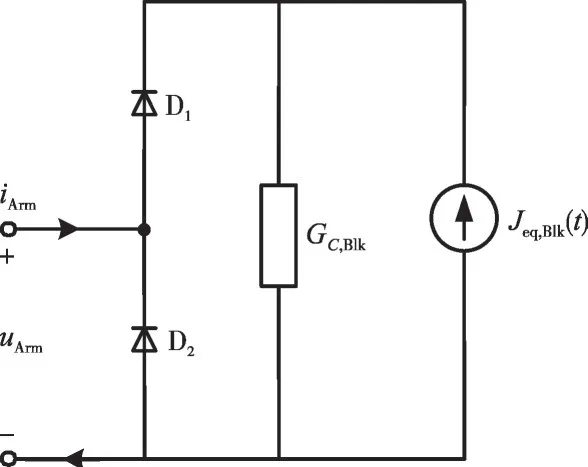
图4 IGBT闭锁时桥臂等效模型
等效参数GC,Blk和Jeq,Blk(t)分别表示闭锁时桥臂Norton等效电路的等效导纳和等效电流源。
1)当iArm实际方向与图5正方向一致时,GC,Blk和Jeq,Blk(t)分别如式(10)、式(11)所示。
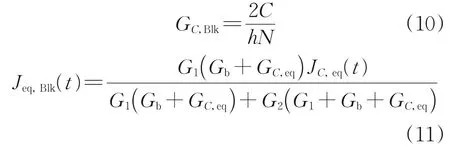
2)当iArm实际方向与图5正方向相反时,GC,Blk为无穷大,Jeq,Blk(t)为0。
3 含MCT 的多电压等级直流电网的协调控制策略
3.1 背景介绍
舟山五端柔直输电工程于2014 年7 月4 日投运。工程在舟山本岛、岱山岛、衢山岛、泗礁岛及洋山岛各建设1座MMC换流站,直流电压等级为±200 kV。该工程旨在提高舟山群岛各岛供电能力和供电可靠性,解决电能质量偏低、风电等可再生能源接入电网等一系列问题。
舟山五端柔直工程的改造计划如图5所示。嵊泗岛上新建±100 kV 的柔直站,通过衢山岛上新建±100 kV/±200 kV 的MCT,与舟山柔直原有的±200 kV 舟衢站相连。新柔直站用于接入海上风电场。
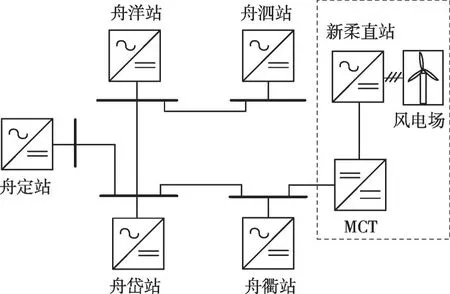
图5 含MCT的舟山柔直系统示意图
3.2 MCT控制目标和控制策略
3.2.1 MCT控制目标
MCT用来实现高压直流电网和低压直流换流站的连接,高压侧连接直流主干电网,低压侧的低压直流换流站连接海上风电场。高压侧直流主干电网的直流电压依靠其内部的换流站进行控制,而低压侧换流站的直流电压Elow需要MCT 来控制。
3.2.2 MCT控制策略
当MCT 低压侧直流换流站连接海上风电场时,其直流电压需要在MCT 的控制下维持稳定。因此低压阀中2M个MMC 的d轴采用定直流电压控制策略,q轴采用定无功功率控制(无功指令值为零),以期减少损耗。
“壶天晓、镜心羽衣,我知道是怎么回事,只是现在没时间解释了。”丁达忍着背部的灼痛,艰难地说道,“接下来,你们将会不定时地开启云织猎影模式。”
在MCT内部的交流部分中,需要若干个高压阀中的MMC 控制交流母线电压值和平衡交流功率[12-16]。这部分MMC采用无源控制,可以选择高压阀中MMCH,1—MMCH,N;其余高压阀MMC 采用定直流电压控制和定无功功率控制(无功指令值为零)。
综上,MCT的控制策略如表1所示。

表1 MCT控制策略
3.3 舟山多电压等级直流电网的协调控制策略
舟山五端柔直改造工程的协调控制策略需要将MCT和新柔直站的控制策略考虑在内。新柔直站采用无源控制策略,MCT 的控制策略如表1 所示。舟山多端柔直系统采用主从控制策略,舟定站采用定直流电压控制,其余4站采用定有功功率控制策略。
舟岱站作为主控制站的后备站,在舟定站退运时转为定直流电压控制。整个系统多电压等级直流电网的协调控制策略如表2所示。

表2 协调控制策略
4 仿真分析
4.1 桥臂高等效性模型仿真验证
通过和子模块Thevenin 等效模型进行对比,验证本文所述桥臂高等效性模型的准确性和高效性。在PSCAD/EMTDC中搭建如图6所示的两端单极MMC-HVDC 测试系统,系统额定直流电压为400 kV,额定直流功率为400 MW,详细参数如表3 所示。MMC1 采用定有功功率控制和定无功功率控制,指令值分别为PMW 和0 Mvar;MMC2 采用定直流电压控制和定无功功率控制,指令值分别为400 kV 和0 Mvar;仿真时间步长为20 μs。控制系统均采用基于解耦双同步参考坐标系的直接电流控制。

表3 测试系统参数
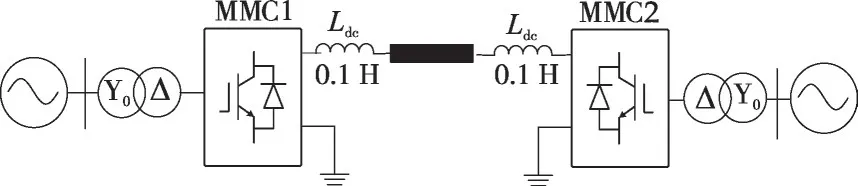
图6 两端单极MMC-HVDC系统
4.1.1 功率阶跃
t=1.0 s 时,MMC1 的有功功率指令值从200 MW阶跃至400 MW。2个等效模型的暂态响应如图7所示,可以看出,2个等效模型对于功率阶跃响应完全一致。
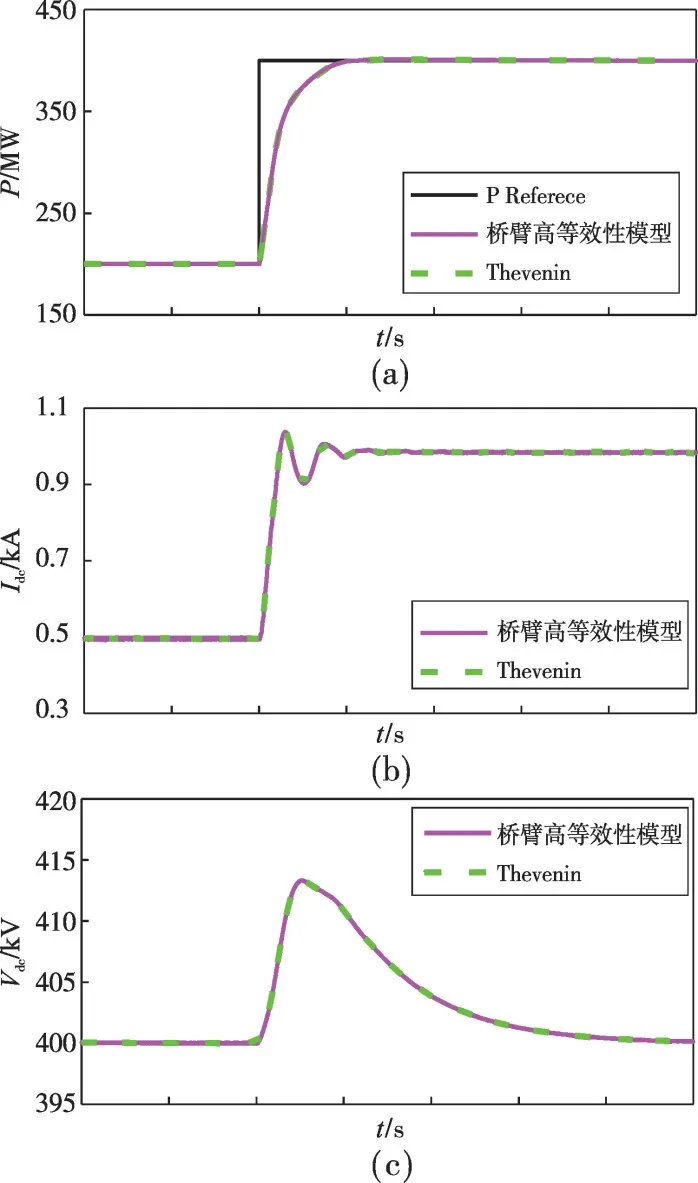
图7 功率阶跃响应对比
在PSCAD/EMTDC分别对2个等效模型进行仿真,得到不同子模块数量对应的仿真时间如表4所示,可以看出:桥臂高等效性模型的仿真时间基本与桥臂子模块数量无关;子模块Thevenin 等效模型随着桥臂子模块数量的增多,仿真时间不断增加。
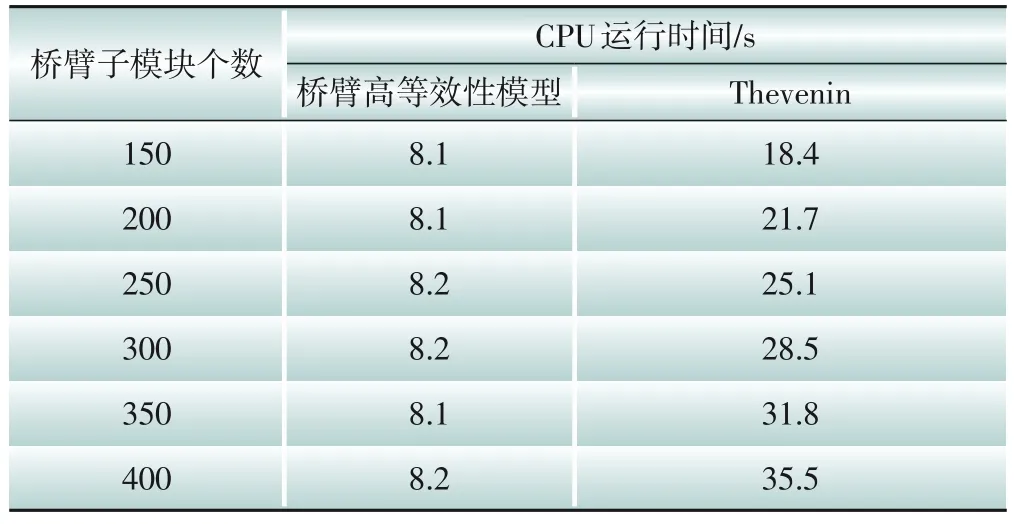
表4 仿真时间
4.1.3 2种电磁仿真模型对比分析
子模块Thevenin 等效模型对MMC 中全部的子模块都进行了等效,因此具有很高仿真精度,但是存在仿真速度较慢的缺点,导致该模型无法适用于MMC-HVDC大规模电网。
本文所述桥臂高等效性模型在开关函数法的基础上,建立了对于MMC 整个桥臂的等效模型,大大提高了仿真效率。由上述仿真可以看出,与子模块Thevenin 等效模型相比,桥臂高等效性模型的准确度虽然稍逊,但仿真效率更高,因而更适用于对含有大量电力电子器件的MMC-HVDC大规模电网进行仿真研究。
4.2 含MCT的舟山五端柔直系统仿真
图5所示舟山柔直系统仿真系统参数如表5—8 所示,其中MCT 由4 个参数结构完全相同的MMC构成。

表5 含MCT的嵊泗岛新柔直站
仿真系统的运行工况变化和对应控制策略为:t=0.2 s 时,海上风速由12 m/s 降至8 m/s;t=1.5 s时,舟定站退运,此时主控站切换为舟岱站,同时舟岱站由定有功功率控制转为定直流电压控制。系统的响应特性如图8所示。
由图8可以看出:当仿真系统中的主控站切换时,系统中的直流电压在暂时波动后能迅速恢复至额定值;在海上风电场的出力变化时,系统中的直流电压保持稳定,同时上海风电场的减发功率由舟洋站迅速填补。验证了本文提出的MCT的多端柔直系统协调控制策略的合理性。
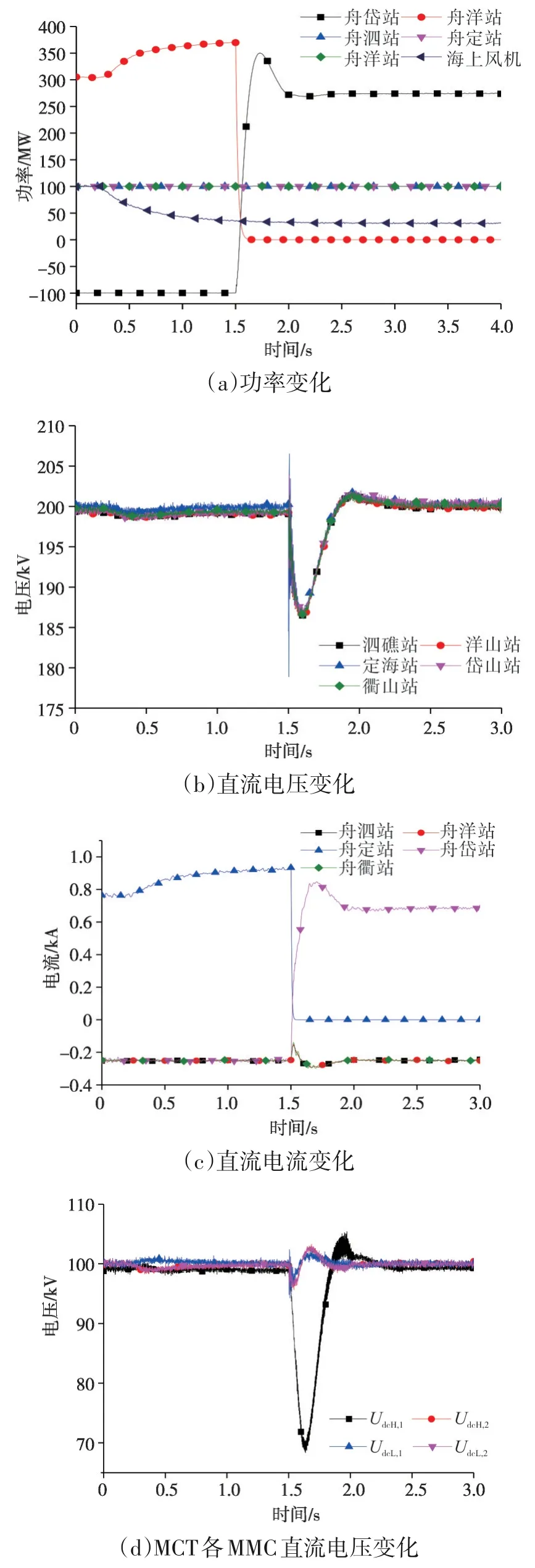
图8 含MCT的舟山柔直系统的响应特性
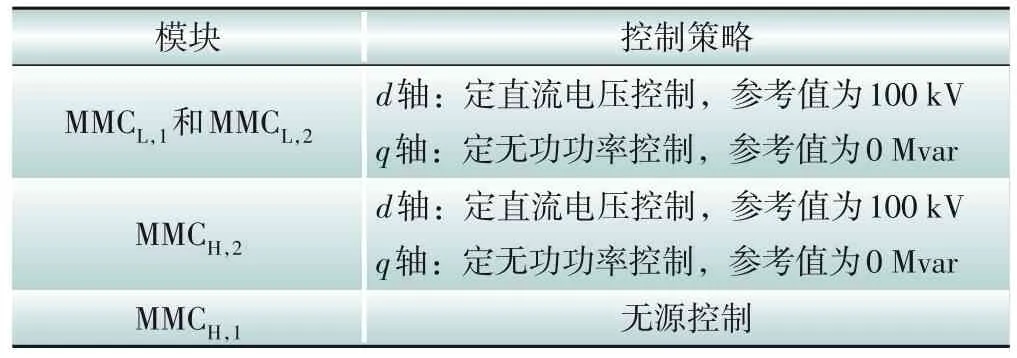
表7 MCT控制策略

表8 海上风电场参数
5 结论
本文提出了一种桥臂高等效性模型,在此基础上研究了含MCT的多电压等级直流电网的协调控制策略,并进行了仿真验证,得到如下结论:
1)本文提出的桥臂高等效性模型具有和子模块Thevenin 等效模型一样的准确度,且仿真效率远高于子模块Thevenin等效模型。
2)对于多电压等级的直流电网,在海上风电场输送功率波动时,系统在维持直流电压稳定的同时能够快速响应功率变化;当主控站切换时,系统能够在短时间内迅速恢复正常运行。仿真结果验证了本文所提的多电压等级直流电网协调控制策略的可行性和有效性。
猜你喜欢
中风与神经疾病杂志(2022年7期)2022-09-01
舰船科学技术(2022年11期)2022-07-15
宁夏电力(2022年1期)2022-04-29
电源学报(2022年2期)2022-04-19
防爆电机(2021年3期)2021-07-21
电子制作(2021年11期)2021-06-17
电力大数据(2020年8期)2020-02-05
电子制作(2019年19期)2019-11-23
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
