
基于目标检测的智能垃圾分类垃圾桶的设计
2022-03-22 09:10祝朝坤陈记文
电子产品世界 2022年2期
祝朝坤 陈记文
摘?要:本设计使用目标检测识别进行分类垃圾以代替传统的人工分类。本设计旨在用前沿的YOLOv3模型去实现准确的垃圾识别。设计中的模型利用Anaconda搭建环境变量,并在Pycharm软件上运行模型。YOLOv3模型实验所需的数据集来自华为云人工智能大赛提供的垃圾分类数据集,共有44种垃圾类别,图片数为1.9万张。经测试发现YOLOv3模型能够快速而又准确地识别出44种垃圾,随后通过蓝牙发出信号给STM32单片机部分,单片机通过控制舵机旋转后完成全自动化垃圾分类。
关键词:智能分类垃圾桶;环境保护;STM32单片机;深度学习;TensorFlow;YOLOv3
1 研究背景
随着科技的快速发展,人们的生活水平得到了很大的改善,城市生活中的垃圾数量也随之飞速增长。近年来我国提出了全民垃圾分类的政策并在全国进行试点推广,为解决垃圾处理问题,各个城市相继出台了垃圾分类的地方标准,但实际执行起来依然有不小难度,用户的习惯和对垃圾分类知识了解的不足带来垃圾分类的现实困难,而设置专门的管理人员则会大量浪费人力资源。如果可以通过相关的设计实现自动分类的垃圾桶,将有助于大幅提升垃圾分类的准确率和效率。
深度学习技术的高速发展,它的功能也逐渐增强,尤其是在目标检测和图像识别等领域上发挥着重要作用。本文提出的基于深度学习的智能垃圾分类垃圾桶,该设计将人工智能与垃圾分类进行有机结合,提出了一种能够自动进行垃圾分类的垃圾桶的设计方案。方案的关键在于如何对目标准确而有效地识别,特别是应用性能较为优异的卷积模型作为目标检测的模型,对其在目标检测识别领域的应用具有十分关键以及重要的研究价值。
2 分类垃圾桶简介
2.1 分类垃圾桶的总体设计
分类垃圾桶整个方案分为PC(个人计算机)端和硬件端两大部分组成,总体设计图如图1所示。
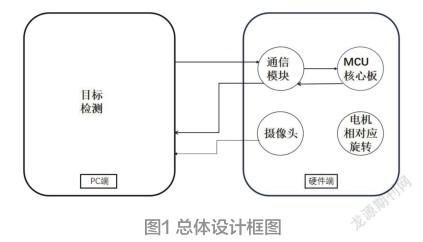
PC端主要是实现垃圾的分类,主要处理过程如下:
(1)摄像头捕捉到含有垃圾的图片;
(2)图片传入到模型中进行处理;
(3)处理完后会通过蓝牙发送信号给硬件端。
硬件部分的设计如图2所示,STM32上电后串口、定时器进行初始化。当STM32收到电脑端发送的垃圾类型数据时,对收到的数据进行判断,用于区别出被识别垃圾的种类。当垃圾成功识别种类时,STM32通过控制垃圾桶底部的垃圾旋转控制裝置。旋转不同的角度使垃圾投放进不同分类的格子中。实现不同垃圾的分类效果。在实际执行中,系统将通过控制垃圾旋转装置旋转到一定角度来进行下方垃圾格子的选择,如干垃圾时旋转0°、湿垃圾时旋转90°、可回收垃圾旋转180°、有害垃圾时旋转270°,从而将垃圾投入下方系统定的格子中。

3 模型分析和实际应用
3.1 Two Stage目标检测算法
在人工智能方面较出名的目标检测模型有R-CNN(区域卷积神经网络)、OverFeat、Fast R-CNN、Faster R-CNN、YOLO(You Only Look Once)v1、YOLOv2、SSD(single shot multibox detector)。早期的目标检测模型(较典型的是2013年的R-CNN)是通过人工技术得到物体特征,其中有三个主要步骤。
(1)区域选择:随机生成多个固定大小的窗口然后采用滑动窗口对图像进行遍历。
(2)特征提取:SIFT(尺度不变特征转换,scale-invariant feature transform)是常用特征。
(3)分类器:主要是Adaboost、SVM(支持向量机,support vector machines)。
3.2 YOLOv3模型
YOLOv3作为近期发布的模型,它对之前的算法既有保留又有改进。YOLOv3保留的结构如下所述。
(1)YOLOv1中保留的结构是划分单元格来做检测,区别是划分的数量不一样。采用”leaky ReLU”作为激活函数,进行端到端地训练。一个loss function即可搞定训练,因此只需关注输入端和输出端。
(2)YOLOv2中保留的结构是用batch normalization(批量归一化,BN)作为正则化、加速收敛和避免过拟合的方法,把BN层和leaky relu层接到每一层卷积层之后。
YOLO每一代的提升主要取决于backbone网络的提升,从YOLOv2的darknet-19到YOLOv3的darknet-53。YOLOv3还提供替换backbone——tiny darknet。backbone用Darknet-53提高性能,用tiny-darknet提高速度。以下将从三个方面来讲述YOOv3模型。
DBL(Darknetconv2d_BN_Leaky):如图3所示,是YOLOv3的基本组件,包含了卷积+BN+Leaky relu。在YOLOv3中,BN和leaky relu已经是和卷积层不可分离的部分(最后一层卷积除外),共同构成了最小组件。其中BN结构起到关键作用,它可减少训练计算量。计算公式如下:


concat:张量拼接。将darknet中间层和后面的某一层的上采样进行拼接。拼接的操作和残差层add的操作是不一样的,拼接会扩充张量的维度,而add只是直接相加不会导致张量维度的改变。
3.3 实际应用方面的解决方法
在实际应用中,本实验在设计中碰到两个问题,并且找到了对应的解决方法。
(1)当把YOLOv3模型训练完成后,开始进行测试部分。训练出来的参数加载到测试部分时,可通过在电脑上的摄像头识别出不同种类垃圾。但是此垃圾识别过程不只是在电脑端完成的,它需要部署到硬件端。从图5可看出实物中的大垃圾桶是装有可回收垃圾桶、有害垃圾桶、厨余垃圾桶、其他垃圾桶这四个小型垃圾桶的,系统是通过旋转小垃圾桶再把黑色平台上的垃圾倒入对应类别的特定垃圾桶中,而这个过程不可避免存在摄像头会拍到小垃圾桶中垃圾的可能,进而致误识别操作。
为解决此问题,本设计在垃圾被成功识别并发送了指令后用了一个中断操作,当识别完成后,识别的测试代码将停止运行,而硬件端的STM32芯片将执行倒垃圾操作,倒完后又会反馈给识别代码端继续开启识别过程,从而避免了存在拍摄到垃圾桶内垃圾影响识别准确度的问题。

(2)测试代码中用的是开启摄像头识别模式,但是其本质还是把视频中的每帧图片逐一识别出来,这就涉及到识别灵敏度的操作问题。整个倒放垃圾的过程并不是一瞬间的,而是连续的。在每段识别过程中,可大致分为三种情形,一是垃圾完全没有出现在摄像头下,二是垃圾部分出现在摄像头下,三是垃圾全部出现在摄像头下。因为当垃圾只漏出部分时,识别所需要的特征是不清楚的,因此在这三种情况中第二部分最容易出现误识别操作,而如果按照每帧图片识别的话必定会出现垃圾还没放到黑色平台上,垃圾桶就开始运转的现象。为解决这个问题,本实验通过计算摄像头每秒多少帧和放垃圾这个动作大概需要多少时间,预先设置识别时间并改善识别灵敏度。经过多次的实践结果是,摄像头每秒30帧,放垃圾的时间大约是2秒左右,这个过程中识别到的图片大约为60张,而60张中一定会有误操作图片。本实验通过控制总的识别数量来控制最后发送给STM32微控制器的指令。实验结果表明,最佳值是在2秒内有20张图片全部识别到同一物体时可发送对应指令给STM32微控制器。
经过上面两点改进后,分类垃圾桶在实际应用中的误判断进一步减小,有效提升了识别准确率。
4 实验结果
4.1 系统设计
智能垃圾分类垃圾桶系统设计包含硬件和软件两部分,在测试过程中,我们主要对软件部分进行了模型实验。将YOLOV3模型实验进行结果对比,在VGG(Visual Geometry Group)16实验中用到了tensorflow、VGG16模型,并采用华为的垃圾识别数据集一共包括19 800张图44个类别,先通过训练得出权重再分析实验结果对模型进行了一些微调,之后开始进行测试实验。在YOLOV3模型中用的是torch、YOLOV3模型,华为垃圾识别的数据集一共为19 800张图44个类别,先训练冻结部分为了加快训练,再使用解冻实验加强识别率和先验框,最后进行测试实验。硬件用到了STMF103、语音播放、舵机、蓝牙模块和摄像头。
4.2 YOLOv3实验
4.2.1 实验前的准备工作
第一步 实验前的准备
在训练阶段,本实验基于Windows操作系统,硬件采用Intel Core i7-8750H处理器、NVIDIA 2060ITX独立显卡、16GB显存、16GB内存,在Pycharm软件上运行程序,环境是torch1.8.1版本和cuda1.1.1。
第二步 训练过程
构建完模型后把train和val的数据集划分为9比1,epoch一共为50,冻结和解冻的Batch_size分别为8和3,经过8小时的训练。
第三步 测试
通过摄像头输入图片到测试代码中对物体进行识别,得出结果后发出信号给硬件,硬件部分做出反应。
4.2.2 实验结果
训练出来的training loss数值、val loss数值与训练轮数的关系如图6所示。


从图7中可以看出训练集和验证集的loss值都在同时下降,在实验中能够很好地排除背景干扰。
5 结论
从YOLOv3的实验结果可以得出,在训练轮数增加的同时模型没有出现过拟合状态,并且精确率与召回率也在不断增加,进而证明了模型优良。通過在实际应用上做出了具体改进,使得该垃圾识别系统更接近于应用到实际生活中。由于该系统的构造新颖,YOLOv3模型的表现优异,打破了人们对传统垃圾桶的理解,使人们在生活中随处可见的垃圾箱变得更加人性化。采用该系统设计的智能垃圾分类垃圾桶更容易受大众接首,通过将垃圾在源头进行分类投放,并经过分类回收,使之重新变成资源,实现垃圾的二次甚至多次利用,符合国家号召的实现科学垃圾分类的既定目标。
参考文献:
[1]Wang Xuehao,Li Shuai,Chen Chenglizhao,etc.Depth Quality-awa「e Selective Saliency Fusion fo「 RGB-D Image Salient Object Detection[J].Neurocomputing, 2020,(4):72-74.
[2]孟丹.基于深度学习的图像分类方法研究[D].上海:华东师范大学, 2017.
[3]冯子勇.基于深度学习的图像特征学习和分类方法的研究及应用[D].广州:华南理工大学,2016.
[4]吴正文.卷积神经网络在图像分类中的应用研究[D].成都:电子科技大学,2015.
3225500589244
猜你喜欢
品牌研究(2022年29期)2022-10-15
中国资源综合利用(2017年4期)2018-01-22
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
福建轻纺(2015年3期)2015-11-07
世界科学(2013年7期)2013-03-11
