果蔬自动化采摘执行装置设计与研究
2022-03-21 07:36黄鹏程
农业工程 2022年11期
黄鹏程, 林 雪
(金华职业技术学院,浙江省农作物收获装备技术重点实验室,浙江 金华 321000)
0 引言
农业生产作业中,成熟作物果实采摘是极其重要的环节,消耗了巨大的人力和时间成本,1/3 以上的时间和人力都投入在成熟作物的采摘中[1-2]。与此同时,我国劳动力紧缺对各行各业发展的限制已显现,尤其是果蔬采摘等劳动密集型产业,因此在果蔬采摘领域急需各种类型的采摘机器人[3-5]。同时,果蔬产业是典型的劳动密集型产业,收获环节是机器部件与鲜食器官间存在直接或间接的互作过程,容易造成果实损伤,限制了其收获效率,果蔬收获是最难实现机械化作业的瓶颈环节[6]。目前,多数果蔬的采摘作业是通过采摘执行装置对果蔬的夹持作用实现摘取,而采摘执行装置是采摘机器人与作业对象直接接触的关键部件[7]。此外,果蔬生长环境的可变性和果蔬本身的柔嫩度使得避免夹持损伤成为采摘抓手研究的主要方向[8-10]。由此可见,果蔬采摘机器人的采摘执行装置成为采摘机器人高效无损采摘相关研究的重点和关键,对农业现代化发展具有重要意义。
1 总体结构及工作原理
1.1 总体结构
果蔬自动化采摘执行装置由驱动模组、固定与切换模组和抓取模组3 部分组成,整体结构如图1 所示。其中,驱动模组主要包括旋转电机、齿轮电机、伸缩电机、推动气缸和顶出气缸等;连接与切换模组由固定组件、支撑座、连杆组件及锁紧块连接配件组成;抓取模块则主要是指前端的抓取组件及其配套抓取爪,抓取组件则包括电机座和抓取伸缩电机。

图1 水果采摘装置Fig.1 Fruit picking device
1.2 工作原理
采摘执行装置通过固定组件固定在机械臂上,并通过组件中的齿轮电机带动整个固定组件绕机械臂旋转,实现第1 方位的角度调节;推动气缸推动锁紧块向右侧移动,直至与支撑座相抵;同时,顶出气缸收缩,带动托板向下转动并脱离支撑座的左端,将支撑座与连杆组件锁死。位于装置一端的旋转电机带动连杆组件旋转,进而带动支撑座以旋转电机轴为中心轴旋转,实现第2 方位的角度调节。通过第1 方位和第2 方位的角度调节,实现采摘执行装置对待采摘对象的精准定位。抓取组件内设置有伸缩电机,伸缩电机控制抓取爪的闭合,实现采摘抓取。
2 固定与切换模组
连接与切换模组的主要部件包括固定组件、连杆组件、切换组件和其他配套的结构部件。其中,固定组件和切换组件分别如图2 和图3 所示。
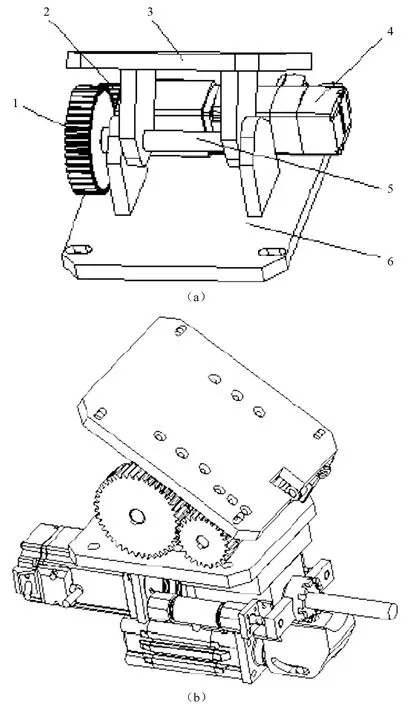
图2 固定组件结构Fig.2 Structure of fixed components
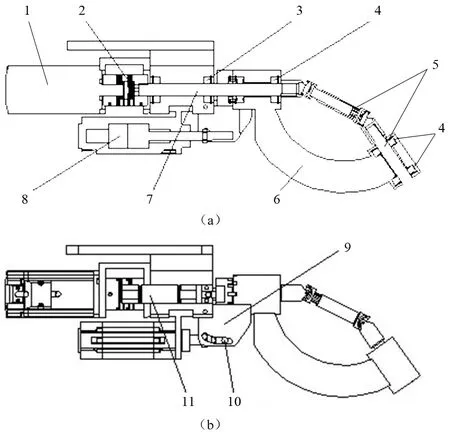
图3 切换组件结构Fig.3 Structure of switching components
2.1 固定组件工作原理
齿轮电机通过第2 齿轮带动第1 齿轮转动,由于上连接板固定在机械臂上,第1 齿轮的转动会带着连接轴和下连接板同步旋转,从而实现下连接板连同底端连接的固定座的角度控制。
2.2 切换组件工作原理
支撑座的左右侧端内均固定有支撑座轴承,分别与转轴和连杆组件形成可转动连接。推动气缸推动锁紧块往右侧移动并与支撑座相抵,实现抓取模组绕着转轴整体旋转和抓取模组自体式旋转两种模式之间的切换。下一步,顶出气缸启动收缩,带动其端部连接的导杆往回伸缩,导杆在托板的弧形槽内运动,使托板向下转动并脱离支撑座左端;旋转电机通过联轴器带动转轴旋转,进一步控制连杆组件与支撑座的转动角度;旋转电机再次启动,向反方向旋转,控制连杆组件带动抓取组件自体式旋转。
3 抓取模组
抓取模组包括抓取爪、电机座、抓取伸缩电机和其他配套部件,如图4 所示。其中,抓取伸缩电机内置在电机座中,其伸缩端贯穿电机座。3 根抓取爪间隔120°均布在电机座上,用于执行抓取动作;电机座上靠近抓取爪侧设有内凹槽,内凹槽内放置有与抓取伸缩电机伸缩端固定的伸缩块;抓取爪的一端与电机座及伸缩块铰接,并采用联动结构,提升抓取便捷度。
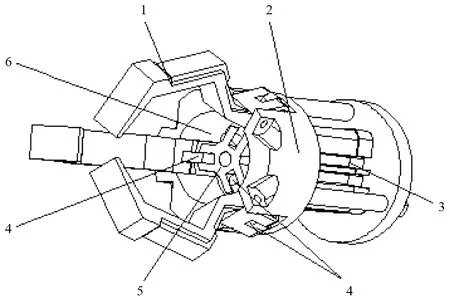
图4 抓取组件结构Fig.4 Structure of picking components
4 驱动模组
驱动模组主要包括旋转电机、齿轮电机、伸缩电机、推动气缸和顶出气缸等驱动装置。其中,旋转电机位于整个装置的一端,与执行装置中心线上的转轴相连,主要用于带动连杆组件旋转,进而实现执行装置的轴向旋转;齿轮电机位于装置的固定组件,通过第1 齿轮和第2 齿轮的传动,实现执行装置的纵向角度调节;推动气缸和顶出气缸控制锁紧块的前后移动和导杆的伸缩,并通过托板与支撑座左侧端的离合,实现抓取模组两种不同旋转模式之间的切换;伸缩电机则位于抓取模组内部,通过控制贯穿电机座的伸缩端,实现抓取爪的夹紧和张开。
5 试验分析
果蔬自动化采摘执行装置作为果蔬自动化采摘过程中的重要机构,直接影响了采摘的效果。在执行装置运动过程中,影响采摘效率的因素主要有抓取模组绕轴旋转和自体式旋转之间的切换效率,以及抓取伸缩电机驱动抓取爪向内转动完成抓取动作的抓取效率。其中,切换效率由切换组件中的推动气缸决定,抓取效率由抓取模组中的伸缩电机决定;而旋转电机和齿轮电机共同决定了执行装置在空间内移动的速度。
根据执行装置采摘试验,确定果蔬自动化采摘执行装置参数范围,如表1 所示。
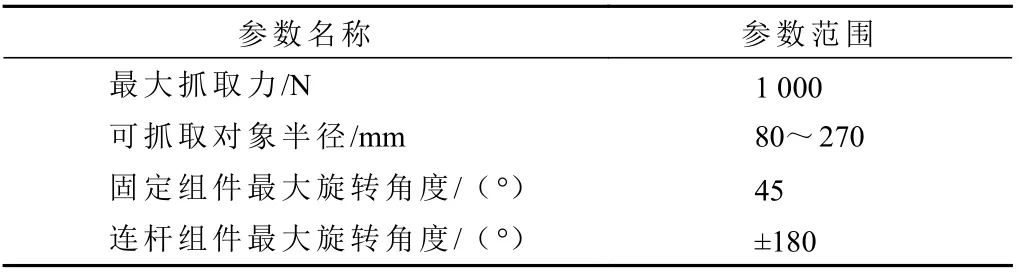
表1 果蔬自动化采摘执行装置运动参数范围Tab.1 Range of motion parameters of automatic fruit and vegetable picking actuator
将执行装置安装在传统刚性机械臂上,以柑橘为对象,进行抓取成功率试验。将柑橘放置在A位置,执行装置将其从A位置抓取,并移动至B位置,A位置和B位置分别位于机械臂最大臂展的两个相对位置上。试验分为3 组,每组100 次,第1 组平均移动速度0.1 m/s;第2 组平均移动速度0.2 m/s;第3 组平均移动速度0.3 m/s。试验结果可知,3 组的平均抓取成功率分别为96%、95%和95%,整体抓取成功率95.33%,可以满足实际使用需求。
6 结束语
本研究涉及的果蔬自动化采摘执行装置可安装在多关节的机械臂末端,与传统刚性机械手配合形成能实现果蔬采摘的自动化装置。执行装置包含驱动、固定与切换、抓取3 个功能模组,通过气缸驱动实现结构转换,以达到单一电机驱动多种运动方式的目的,在确保抓持任务的前提下,降低电耗,提升装置的续航能力。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
童话世界(2019年26期)2019-09-24
电子制作(2019年12期)2019-07-16
中国交通信息化(2018年5期)2018-08-21
启蒙(3-7岁)(2018年8期)2018-08-13
电子制作(2018年8期)2018-06-26
基层中医药(2018年2期)2018-05-31
学生天地(2017年27期)2018-01-04
汽车实用技术(2017年16期)2017-09-21