灾区无人机救援系统中基于凸包理论的无人机部署算法
2022-03-20 08:03:48魏长宝
弹箭与制导学报 2022年6期
魏 妍,魏长宝
(1 驻马店幼儿师范高等专科学校计算机系,河南 驻马店 463000;2 河南大学教育科学学院,河南 开封 475004;3 黄淮学院信息工程学院,河南 驻马店 463000)
0 引言
无人机(UAV)已在电讯、救援等应用领域广泛使用[1]。在基于UAV的灾区救援中,UAV为灾区内的地面终端用户(GT)提供通信服务。如何为这些GT提供实时、高效的通信服务是此类应用的关键。
UAV的部署对通信服务质量有直接影响。文献[2-10]分析了UAV的部署问题。其中文献[2-4]只讨论了单UAV部署问题,而文献[5-10]讨论了多UAV部署场景。例如,文献[5]提出了基于分布式算法部署UAV,进而保证局部优化覆盖。文献[6]提出了基于粒子群优化的UAV部署算法,以最小化UAV数。此外,为了最小化UAV与GT间的平均距离,文献[7]提出了优化覆盖质量的UAV部署算法(OQCV)。
然而,上述研究均假设GT的位置信息是已知信息。但在真实的应用环境中,获取所有GT的位置信息是非常困难的。
为此,针对灾区救援场景,提出基于测距的分布式UAV部署算法(RDUM)。RDUM算法不再假设GT的位置为已知信息,而是先通过接收信号强度估计UAV与GT间的距离(测距)。再基于测距信息,并结合凸包理论,部署UAV,使GT与UAV间平均距离最小,进而GT端获取较大的信息容量。
1 系统模型及测距
1.1 系统模型
考虑如图1所示的网络系统,其有N个地面终端用户,它们形成GT集MGT={u1,u2,…,uj,…,uN}。假定GT是静态的,但其位置未知。令wj表示第j个GT在水平面上(地面)的二维位置,且wj∈R2×1,j=1,2,…,N。

图1 系统模型
网络还部署了K个UAV,它们形成UAV集MUAV={n1,n2,…,ni,…,nK}。令Hi表示第i个UAV在空中的高度。令Di表示第i个UAV在水平面上的位置坐标,即Di=(xi,yi),其中i=1,2,…,K。
假定UAV与GT间通信为视距链路。UAV与GT间的信道增益服从自由空间路径衰减模型。衰减强弱与两者间距离密切相关。
第i个UAV与第j个GT间距离可表示为:
(1)

(2)
1.2 测距
尽管GT位置为未知信息,但是UAV通过接收信号强度(received signal strength indicator, RSSI)[11]值, 估计离其周围GT的距离。具体而言,每个UAV知晓离集Ui内所有用户的距离。
(3)
式中:ni为部署的第i个UAV;Ui表示由离ni最近的GT所组成的GT集;uj为Ui集中的第j个GT。依据式(3)可知,对于Ui内任意一个GT而言,ni是离它最近的UAV。采用扩展Kalman滤波[12-13]估计UAV与GT间距离。令pij表示ni从第j个GT所接收的信号强度值,其表达式为:
pij=poi-10ξlog2dij+εi
(4)
式中:poi表示传输功率;εi表示由环境决定的不确定性带来的测量误差;ξ表示由环境决定的衰减因子;dij表示ni与uj间距离。
2 问题描述
为提高UAV对GT的服务质量,即优化UAV部署,以最少的UAV数覆盖GT。假定UAV与GT间通信信道在视距环境[14],路径衰耗是影响覆盖质量的主要因素。因此,通过缩短GT与UAV间距离减少路径衰耗,最终提高覆盖质量。
换而言之,目标函数就是搜索UAV的位置,致使GT离其最近的UAV的平均最小距离为:
(5)

值得注意的是:GT位置是未知信息,UAV也不知道它们自己位置。无需GT的具体位置,只需要UAV与GT的距离信息,这是RDUM算法的一个显著特点。
在基于视距链路的前提下,无论GT在哪里,只要GT与为该GT服务的UAV间的距离相等,GT所接收的服务质量就相同。换而言之,服务质量取决于GT与UAV间的相对距离,而不是相对位置。因此,RDUM算法只需测距,进而避免了估计GT的位置所产生的通信开销或者计算开销。
3 RDUM算法
3.1 凸包理论的引入
凸包(convex hull)是数学概念[15],它的数学定义为:在一个向量空间V中,对于给定集合X,所有包含X的凸集的交集S被称为X的凸包。而点集Q的凸包是指一个最小凸多边形,满足Q中的点或者在多边形边上或者在其内。图2中由红色线段围成的多边形就是点集Q={p0,p1,…,p12}。
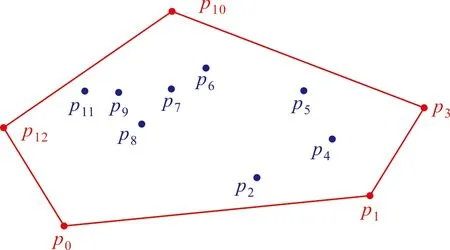
图2 点集Q的凸包示例



(6)
证明:引入函数:
(7)
对式(7)进行展开,可得:

(8)

3.2 求解GT离其最近的UAV的平均最小距离
依据命题1,为了求解式(5),将GT划分多个区。每个区的质心作为UAV的位置。具体而言,依据式(3)对Ui的定义,以每个Ui所包含的所有GT构成的空间为一个区,UAV部署于该区的质心位置。
接下来,需要解决的问题是如何将UAV移动至这些区的质心位置。部署过程分两步。
步骤1:在时刻t∈[t0,t1]期间,先随机选择N个位置作为UAV的水平位置,即给D1(t),…,Di(t),…,DN(t)∈W值赋予初始值。其中Di(t)表示第i个UAV在时刻t的位置。
步骤2:对于任意一个UAV,在tk(k=1,2,…)时,执行以下3子步。

(9)
式中:xi(τk),yi(τk)分别表示τk时刻的ni横坐标、纵坐标;xi(tk),yi(tk)分别表示在tk时刻的ni横坐标、纵坐标。
再构建直线方程:
(10)


(11)
式中:dij(t)表示在t时刻ni与uj间距离。
因此,在tk+1时刻ni的位置Di(tk+1)可表示为:
(12)
3)ni沿着直线段从Di(tk)移动到Di(tk+1)。
4 性能分析
4.1 仿真参数
在1 000 m×1 000 m水平区域内部署N个GT和K个UAV。每个UAV的高度是固定的,且在20~40 m区间。考虑文献[17]的路径衰耗模型。对于任意一个GT,其视距链路的损耗模型为:
(13)
式中:fc表示载波频率;光速c=3×108m/s;ηLoS表示关于视距链路的损耗因子。
因此,uj端所接收的信号功率为S=Pt-P,其中Pt表示传输功率。假定所有GT的传输功率相同。此外,uj端所获取的信息容量为:
(14)
式中:|Ui|表示由ni覆盖的GT数;SNR(j)表示uj端的信噪比,且SNR(j)=S/N0,其中N0表示噪声;B表示带宽。这些参数在仿真中的取值为:ηLoS=1,fc=1 GHz,Pt=24 dBm,N0=-104 dBm,B=5 MHz。
4.2 UAV的部署性能
首先,分析RDUM算法对UAV的部署性能。假定500个GT随机分布于区域内。最初,先随机部署15个UAV,它们的初始位置如图3(a)所示。再通过执行3.2节的部署步骤,UAV分别移动至局部最优位置,如图3(b)所示。图中的红色曲线表示UAV的移动轨迹;蓝色的点表示UAV;黑色的小圆点表示GT。

图3 UAV的部署示例
4.3 RDUM算法的F(D)和信息容量C性能
由原理分析可知,当UAV高度固定时,F(D)值越小,视距路径越短,UAV对GT的覆盖性能越好。图4给出UAV数对F(D)的影响,其中N=500。
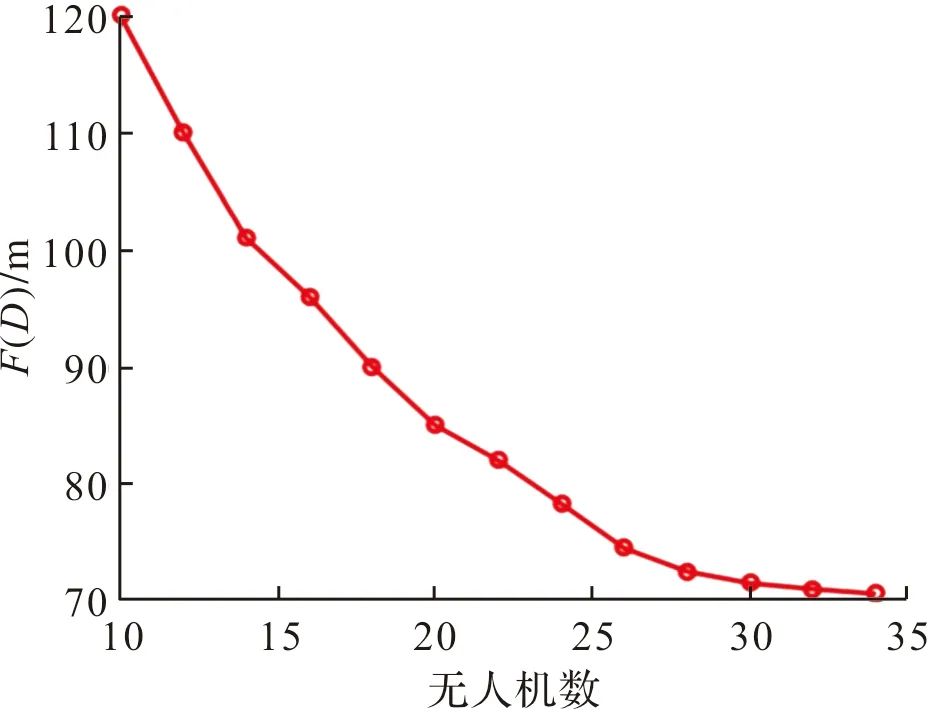
图4 F(D)随无人机数的变化曲线
从图4可知,随着无人机数的增加,F(D)迅速下降。原因在于:无人机数越大,每个无人机需要覆盖的GT越少,无人机离GT更近。当无人机数增加至GT数时,每个无人机只需为一个GT服务,这时的F(D)最短。
图5给出了UAV数对信息容量C的性能影响。信息容量C反映了GT端的信噪比,信号质量越好,信息容量C就越大,性能越好。

图5 C随无人机数的变化曲线
由图5可知,无人机数和GT数均影响了信息容量C。通常,无人机数的增加,有利于信息容量C的增加。原因在于:无人机数越多,拥有的带宽资源越多,这有利于提高信息容量C。而随着GT数的增加,信息容量C会下降。原因在于:GT数越多,分享带宽资源的用户数越多。
然而,F(D)随无人机数的下降率和信息容量C随无人机数的增加率均随无人机数的增加变缓慢。这说明,在无人机数与GT所获取的服务性能间存在平衡。因此,网络供应商可依据GT对服务性能要求部署无人机数。
4.4 对比分析
为了更好地分析RDUM算法的性能,选择文献[7]提出的优化覆盖质量的UAV部署算法(OQCV)作为参照。OQCV算法中UAV知晓GT的位置。为了准确地分析GT位置信息对F(D)的影响,OQCV算法分别考虑20%、60%和100%的GT位置是已知信息的3种情况,将这三种情况分别标记为OQCV-20%,OQCV-60%和OQCV-100%
图6给出RDUM算法和OQCV算法的F(D)性能对比,其中N=500,K=15。从图可知,RDUM算法和OQCV算法收敛后,RDUM算法的F(D)值低于OQCV-20%,OQCV-60%的F(D),但是高于OQCV-100%的F(D)值。

图6 RDUM算法和OQCV算法的F(D)随无人机数的变化曲线
此外,相比于OQCV算法,RDUM算法降低了收敛速度。原因在于:OQCV算法中GT的位置信息是已知的,而RDUM算法需要估计UAV与GT间的距离。
图7进一步分析了OQCV算法和RDUM算法的F(D)性能。从图7可知,只有94%的GT的位置信息是已知时,OQCV算法的F(D)值才低于RDUM算法的F(D)。当达到100%的GT的位置信息为已知时,OQCV算法的F(D)为96 m,而RDUM算法的F(D)为98.4 m。在这种情况下,OQCV算法的性能优于RDUM算法,但是估计GT的位置增加了通信开销和计算成本。

图7 已知GT位置信息的比例对F(D)的影响
上述分析是假定所测量的UAV与GT间距离(测距)是准确的。然而,在实际环境中,测距可能存在误差。因此,分析RDUM算法对测距误差的鲁棒性是十分必要的。假定在测距过程中存在0~20 m的测距误差。图8显示了F(D)随测距误差变化曲线。
从图8可知,F(D)随测距误差的增加而缓慢增加。例如,当用户数为200、测距误差为20 m时,F(D)只比无测距误差提升了0.8 m。这说明,RDUM算法对测距误差具有较强的鲁棒性。此外,用户数越多,测距误差对F(D)的影响越小。原因在于:对于给定的用户数而言,测距误差会影响F(D)。但所有的用户都计算F(D),这就降低了测距误差对F(D)的影响。这也解释了为什么用户数越多,测距误差对F(D)的影响越小。

图8 测距误差对F(D)的影响
5 结束语
为了提高UAV对灾区中GT的服务质量,研究了UAV的部署问题,并提出了RDUM算法。RDUM算法通过缩短UAV与GT间距离,提高UAV的服务质量。考虑到估计GT的位置信息的计算成本,RDUM算法只需测距,无需定位。仿真结果表明,RDUM算法的性能逼近OQCV-100%算法的性能。
文中假定UAV的高度不变,在部署UAV时没有考虑UAV的高度信息。后期,将考虑的UAV的高度信息,对RDUM算法进行改进。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30 06:25:14
今日农业(2021年7期)2021-07-28 07:07:16
非公有制企业党建(2020年5期)2020-06-16 08:46:00
中国计算机报(2020年9期)2020-03-25 15:10:34
科学(2020年3期)2020-01-06 04:02:51
北京航空航天大学学报(2017年7期)2017-11-24 05:27:26
汽车与安全(2017年9期)2017-09-29 01:36:57
居业(2017年5期)2017-07-24 13:56:27
电子制作(2017年7期)2017-06-05 09:36:13
太空探索(2016年9期)2016-07-12 10:00:02