三维激光扫描技术在城市轨道交通隧道断面测量中的研究
2022-03-17 10:26杨建勇
南方农机 2022年6期
杨建勇
(中铁第五勘察设计院集团有限公司,北京 102600)
在城市轨道交通工程中,为了顺利开展线路中线调整及轨道铺设工作,工作人员应当在土建结构施工结束以后,根据实际情况对车站、隧道区间、高架桥的底板纵断面和结构断面等进行断面测量。完成线路中线调整工作以后,还要以调整后的中线成果为基础重新计算,以保证轨道建成后车辆营运界限符合要求[1]。在结构断面测量过程中,要以施工控制点和至少两站一区间贯通测量后的精密导线点为主要依据,依照《城市轨道交通工程测量规范》要求完成测量工作,对于结构异常、施工偏差大的断面处,工作人员应当根据实际情况进行复测。传统的城市轨道交通断面测量方法以断面仪法、全站仪极坐标法、摄影测量法为主,这些测量方法在实际应用中能够测量的断面数量十分有限,因此许多测量结果不能反映隧道结构的全貌[2]。本文以城市轨道交通隧道工程为例,运用三维激光扫描技术,对三维激光扫描技术在轨道交通工程结构断面测量的技术使用方法以及可行性进行深入探究。
1 准备工作
1.1 仪器设备
随着社会经济的迅速发展,三维激光扫描技术在测绘技术行业的应用越来越广泛。RIEGL VZ-1000地面三维激光扫描仪,可以在1 s之内发射纤细激光束30万点,采集点位密度相对较大,数据信息丰富,可以把现实环境真实反映出来;角分辨率可以高达0.000 5°,测量准确度较高,在对表面复杂的物体进行测量时,也可以实现精细化测量;测量速度较快,可以缩短测量时长,节省投入资金成本;三维激光扫描技术抗干扰性能较好,即使是夜间也不会对测量结果造成影响。把三维激光扫描技术与云台设备有效结合在一起,不仅可以实现360°全圆扫描隧道,还可以使得所获得的点云数据变得更加具有全面性,如图1所示。
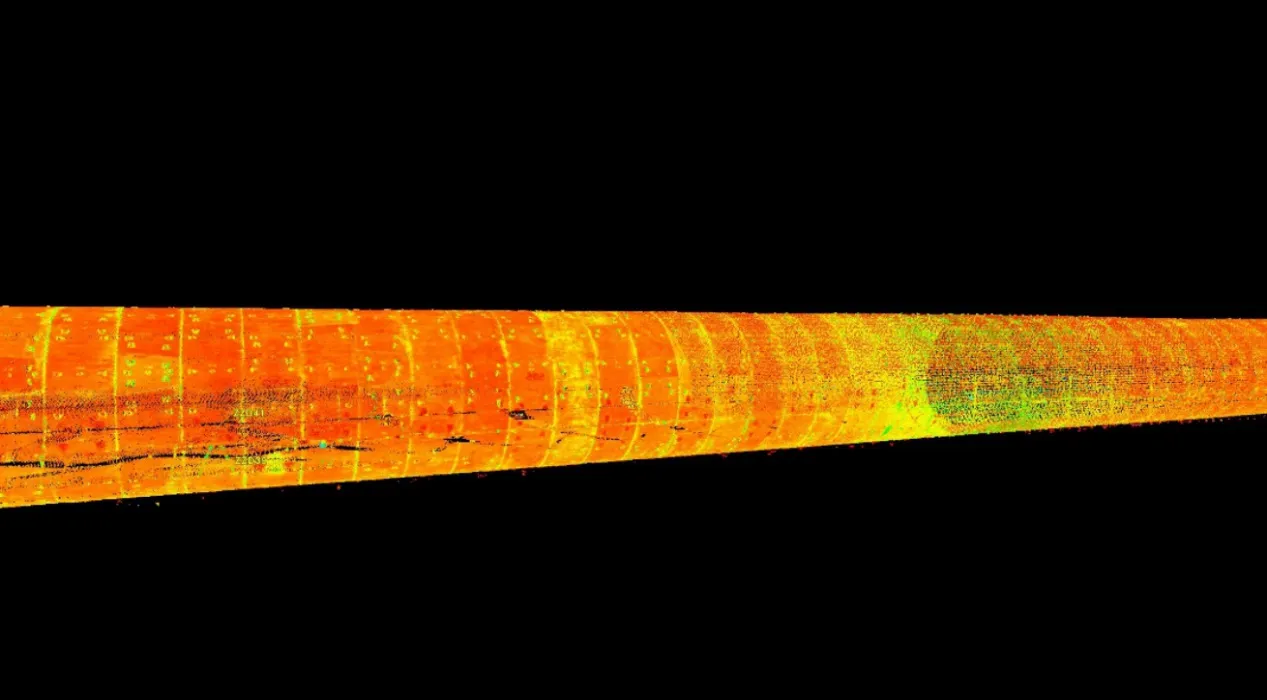
图1 三维激光扫描技术图
1.2 控制网的测试
在点云数据采集前,还应做好控制网的测试,即平面控制网的测试和高程控制网的测试。在控制网测试过程中,应根据城市轨道交通工程的情况,合理地设置测量单元,一般情况下,以两站一区间为一个测量单元。对平面控制点和高程控制点进行合理布设,将其设置在隧道区间两端车站地板上,通过联系测量,获得平面控制点对应的平面坐标以及高程控制点对应的高程值并作为起算点[3]。
在隧道内进行控制点的布设,两个控制点之间相隔100 m,既可以作为平面控制点来使用,也可以作为高程控制点使用。在平面控制网测试过程中,可以选择导线测量与LeicaTS50测量机器人结合使用,对平面控制网进行测量和观测。在高程控制测试过程中,主要进行二等水准观测,可以选择TrimbleDi-Ni03电子水准仪来开展。完成平面控制网和高程控制网的测量后,可以采用COSA平差软件,对其进行统一的平差处理,进而可以获取准确的三维坐标值[4]。
2 外业数据采集及方案设计
2.1 方案设计
结合城市轨道交通工程隧道的特征,在利用三维激光扫描设备进行数据采集时,工作人员要把已知的精密导线点作为起算点,使用测站+后视的设站模式完成此项工作。工作人员应当在精密导线点上设站,测站点应保证是在隧道的中心位置,而且不受遮挡,保证每一测站都能够获得最大的扫描范围,对于获得的点云数据,应保证分布均匀。然后对中整平后输入后视高、仪高、后视点以及设站点等信息,再设置扫描参数,对于扫描参数的设置,可以采用全景扫描的方式,这样可以获得更加全面的点云数据。对于扫描分辨率的设置,要兼顾测量精度和效率[5]。在另一处精密导线点上架设标靶,对于标靶的布设,应掌握好与测站之间的距离,通常情况下,直线段控制在40 m~50 m范围较为适宜,曲线段控制在30 m~ 40 m范围较为适宜,可以在具体测量中随时调整。完成上述工作,方可开始隧道扫描工作。工作人员需要结合现场实际情况,仔细扫描后视精密导线点上的标靶,使得三维激光扫描系统可以把中心点坐标自动拟定出来,进而为顺利开展点云数据拼接以及为定位工作提供数据支持[6]。此外,工作人员要在电脑笔记本上仔细检查本站扫描数据的完整性,尽量确保本站所获得的点云数据与其他站所获得的数据重叠度达到30%,并且要结合所获得的点云数据状况,科学合理地计划下一个设站位置。
2.2 外业数据采集
隧道工程内部空间狭窄,且湿度大、空气流动差,造成施工难度较大。因此在正式外业数据采集之前,做好方案设计工作,并且严格按照方案设计进行落实。在隧道内的侧壁上,设置精密导线点,对其采用相应的保护措施,使其保存完整,之后使用强制归心装置。为了能够把隧道内部具体状况真实地反映出来,在采集外业数据过程中RIEGL VZ-1000三维激光扫描仪所设置的扫描距离为200 m,点云采样间隔为100 m处0.03 m,扫描范围为360°全圆扫描。这样不仅能够把隧道具体情况直接反映出来,还可以使得外业工作效率得到一定程度的提升。在具体作业时,一旦碰到半封闭空间控制点布设困难的情况,采用RIEGL自带的点云处理软件,并且发挥其RISCANPRO自动拼接功能,结合三维激光扫描仪,实现自由设站,对于测站之间的重叠区域,保证在30%以上即可,然后开展内业工作,对数据实施拼接处理。通过这种方式,可以提高测量效率,缩短测量时间[7]。
3 数据处理
在业内数据处理过程中,工作人员可以根据实际情况,科学合理地利用RIEGL自带点云处理软件RISCANPRO,按照断面提取、点云数据抽稀、影像匹配、拼接以及去噪的步骤完成此项工作。
3.1 数据拼接以及去噪
通过RIEGL VZ-1000三维激光扫描仪的应用,将采集的点云数据合理地引入到RISCANPRO内部,从中就会看到一些噪点。噪点主要是在外业数据采集过程受相关因素影响所产生的,包括扫描过程中出现遮挡,扫描时受到光束反射等影响所造成的,工作人员可以充分发挥程序自带的剔除功能,将这些噪点相应地剔除。基于城市轨道交通隧道内部的实际情况,一般情况下,内部控制点的边长较短(平均在150 m左右),因此对于相邻测站之间,所获得的点云数据基本重合,这样就会造成有大量重叠无效的数据,内业整理时,工作人员需要注意对这部分数据的处理,剔除无效点云数据,然后将相邻测站有效点云数据保存下来并使用[8]。
3.2 数据拼接
由于在外业数据采集过程中,使用的测站+后视,辅助自由设站模式,虽然起到了良好的测量效果,但是对于所获得的点云数据,只是点号等相关信息,对于控制点坐标,在现场施工中未输入到系统中,这样测站+后视模式所采集点云数据是独立的,自由设站所获得的点云数据也是独立的,都存在于各自的坐标系统内部。因此,为了将二者所获得的点云数据整合到同一坐标系统下,工作人员要采用适宜的方式拼接点云数据。对于测站+后视模式所采集的点云数据,具体要按照RISCANPRO坐标文件格式编译点云数据,然后读入点云处理软件以及去噪点后的点云数据,点云数据在选取对应控制点后自动进入测量坐标系统,最后进入同一个文件,获取整体数据[9]。对于自由设站所采集的点云数据,要运用到测站+后视模式所采集点云数据经过拼接处理后的数据,通过扫描使得二者重合,然后自动拼接,最后获取整体点云数据。
3.3 影像匹配
观察点云数据,可以发现其没有任何的颜色,导致点云数据缺少直观性,因此,工作人员要采用适宜的方式,针对点云数据进行影像匹配作业。在扫描过程中,工作人员获取影像数据时,可以采RISCANPRO的Image Registration模块进行,这样对于获得的点云数据信息,会获得相关的色彩信息。
3.4 点云数据抽稀
对于每个测站之间,重叠区域较大,且扫描的点云数据间隔较小,这就导致所获得的点云数据量较大,因此工作人员采用适宜的方式对点云数据进行抽稀作业非常有必要。这样可以使得隧道结构断面提取的数据更加具有时效性以及科学性。在对处理以后的点云数据进行抽稀过程中,要以0.05 m间隔完成此项工作。除此以外,在提取结构断面原始信息数据时,可以直接使用抽稀以后的点云数据[10]。
3.5 结构断面提取
在结构纵断面信息数据提取过程中,要满足一定的要求,即对于点位与设计里程,必须要相对应,在数据采集过程中,完成轨道铺设工作以后,工作人员利用RISCANPRO软件,发挥其特征线提取功能,科学合理地提取轨道轨顶中心线。对于获取的轨道规定中心线以后,还要与轨道中心线拟合,最后要与设计线位套合,通过上述方式后,可以获得中线里程。与此同时沿着轨道中心线,进行纵段面的剖切,可以在点云数据中获得高程。沿纵断面里程,结构横断面在直线段上,要保证每6 m有一个横断面,其剖切方向与中线垂直;结构横断面在曲线线段上,要保证每5 m要有一个横断面,其剖切方向要与切线方向垂直,与此同时对于结构断面变化处,根据要求也要设置断面。剖切以后,可以获得三维坐标值。在匹配纵断面里程及对应中心点坐标时,可以将剖切的横断面作为主要依据,在此过程中,对于结构断面,可以在中线里程中随意增加。在绘制结构横断面时,对于采用的点云数据,可以直接使用剖切导出来的点云数据,在绘制结构纵断面时,主要是针对拟合的轨道中心线,直接提取即可。完成上述工作以后,工作人员进行数据转换,同时整理成果,需要按照规定的提交格式[11-12]。
4 结束语
综上所述,本文深入研究了三维激光扫描技术在城市轨道交通隧道工程结构断面测量过程中的使用情况,分析了三维激光扫描技术在轨道结构断面测量过程中的数据处理以及数据获取方法。在实施隧道结构断面测量作业时,科学合理地利用三维激光扫描技术,不仅可以为后期隧道数字化建设任务提供重要依据,还能使隧道施工经济效益得到一定程度的提升。
猜你喜欢
测绘地理信息(2022年2期)2022-04-02
铁道勘察(2021年6期)2021-12-27
轮胎工业(2021年5期)2021-12-26
新疆钢铁(2021年1期)2021-10-14
全球定位系统(2021年1期)2021-03-26
西部交通科技(2021年9期)2021-01-11
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
环境(2019年4期)2019-04-20
北京航空航天大学学报(2017年4期)2017-11-23