一种智能限速助起轮椅结构设计*
2022-03-17 10:26武新涛廖生温尹力涵李方强
南方农机 2022年6期
武新涛 , 廖生温 , 刘 畅 , 尹力涵 , 李 科 , 李方强
(巢湖学院机械工程学院,安徽 合肥 238024)
随着科技的进步和社会的快速发展,人们的物质文化生活越来越丰富,但是随着我国老龄化程度的不断加深,亟需一种方便老年人生活的轮椅[1]。轮椅是人们在生活中常见的一种医护设备,适用于行动不便的老人和残疾人士,既能帮助他们方便出行,起到代步的作用,又能提供一定的安全保护。但是实际生活中的轮椅大都不太便利,或不太安全,没有充分考虑防跌倒问题。当老人意外跌倒时也无法及时报警,且对使用者缺乏柔性化,使得老人轮椅在舒适度上有一定缺陷[2]。同时,我国现有智能轮椅在助起方面也有空白需要填补,故而需要一种智能限速助起轮椅,防止老人跌倒还能够提高轮椅的舒适度,并且为老人适当锻炼身体、适当步行提供技术保证。基于此,本文设计了一种智能限速助起轮椅。
1 智能限速助起轮椅的整体结构
本文设计的智能限速助起轮椅主要由轮椅基体、智能限速装置、助起装置、跌倒自动检测报警系统四个部分组成。轮椅基体具有一般轮椅的结构,其上装有智能限速装置、助起装置、跌倒自动检测报警系统[3]。助起装置在轮椅座的下方,使轮椅座旋转一定角度,帮助老人起来。智能限速装置安装在轮椅基体上,能够在轮椅行驶速度过大时限制轮椅速度,使得轮椅能够以较为安全的速度行驶。跌倒自动检测报警系统也安装在轮椅基体上,能够在老人意外跌倒时及时检测并把信息传导到轮椅上的检测装置,发出报警信号,提醒周围的人救助老人,并把定位发送到子女的手机上。智能限速助起轮椅的整体结构如图1所示,基体结构示意图如图2所示。
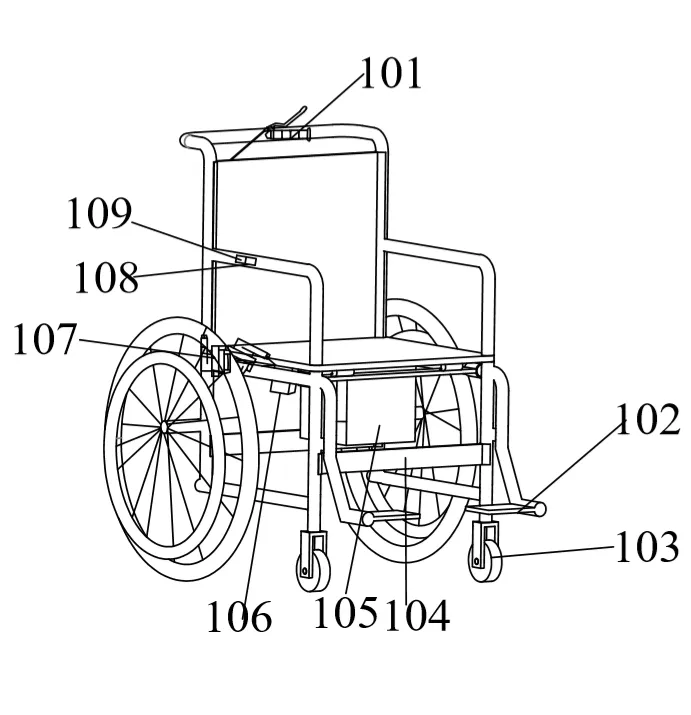
图1 智能限速助起轮椅整体结构示意图
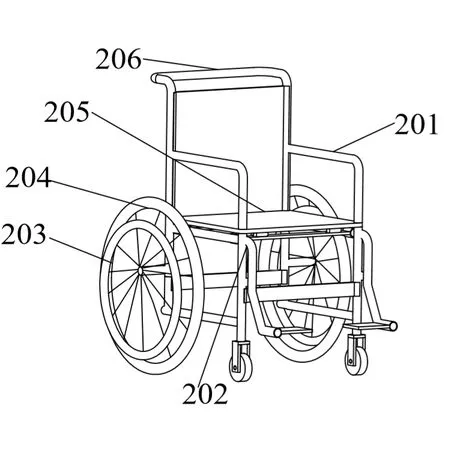
图2 智能限速助起轮椅基体结构示意图
2 智能限速助起轮椅的工作原理
智能限速助起轮椅的设计目的是为老年人生活提供便利,使老年人生活便利化[4]。其工作原理主要包含三大部分:第一部分为智能限速装置,速度传感器和加速度传感器通过导线与控制系统连接,再通过导线控制舵机内部小型电机旋转,达到刹车和限速的目的。第二部分为助起装置,通过电机轴旋转带动杆件向下运动和沿轴向运动,杆件的上下运动带动滑块的上下运动来控制轮椅座的翻转,实现助起功能。第三部分为跌倒自动检测报警系统,三轴加速度传感器通过导线与控制系统连接,把信号通过导线传导到控制系统上,触发报警系统和自动定位系统,轮椅警示灯亮和报警器响且自动定位系统对轮椅进行定位[5]。
3 智能限速助起轮椅的装置介绍
3.1 智能限速装置
智能限速装置安装于基体上,由刹车装置、小型舵机、控制系统及速度传感器组成[6]。当轮椅行驶速度高于设定的安全速度时,即每小时6千米,速度传感器感应到轮椅速度过大,会发出信号给控制系统,控制系统经过分析信号,再通过编程控制舵机旋转一定的角度,舵机中小型电机轴与刹车装置的刹车线相连,通过控制系统驱动舵机中的小型电机开始转动,利用小型电机转动角度来控制刹车线的拉伸长度继而控制两刹车片与轮胎的间距[7]。当轮椅行驶速度过大时,小型电机轴转动一定角度使得两刹车片与轮胎接触并产生滑动摩擦,使得轮胎速度减小,当速度减小到小于规定的安全速度时,速度传感器感应到速度低于安全速度,会发送信号给控制电路,控制系统再控制舵机中小型电机旋转复位,通过驱动舵机中的小型电机来控制刹车线回到原来长度,刹车片的回复有弹簧作用,让刹车片更好复位,继而控制两刹车片回到原来间距实现停止减速,智能限速装置如图3所示。
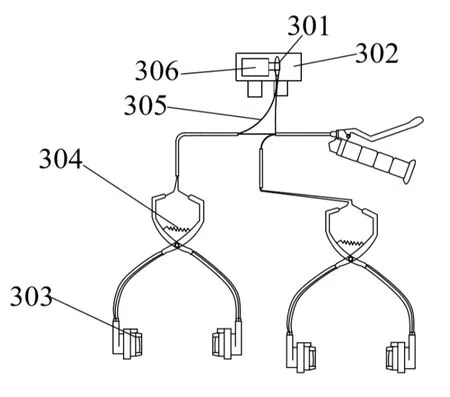
图3 智能限速装置结构示意图
3.2 助起装置
助起装置主要原理是通过按压轮椅扶手上的控制按钮,接通电路,传递信号,再把信号通过电机正反转控制电路实现对电机正反转的控制,从而实现助起装置的上下翻转。当老人想要从轮椅上起来时,可以按上升按钮,此时电信号传导到控制系统内部的电机正反转控制电路上,从而控制电机轴的转动。电机带动电机轴逆时针旋转时,电机轴通过联轴器带动转轴旋转,转轴上通过键连接有螺旋式凸轮,螺旋式凸轮外部轮廓直径从右到左逐渐增大,如图4所示,外部轮廓具有一定厚度。螺旋式凸轮与另一根杆件的末端上圆柱凹槽契合,凹槽的内侧宽度比螺旋式凸轮外部轮廓略宽,保证二者之间很好配合,且杆件垂直于电机轴,杆件外部有套杆,套杆主要功能是当杆件向上运动时其上通过铰链连接的滑块也会向上运动,使得对导轨的摩擦力增加,由于套杆与往复杆相连接,往复杆水平直线运动,运动轨迹与往复杆套配合。当螺旋式凸轮转动时,与螺旋式凸轮外部轮廓接触的圆柱凹槽配合,进而带动与圆柱凹槽相固定杆件[8]。当沿着螺旋式凸轮外部轮廓运动,由于其外部轮廓从右到左逐渐增大,所以使得套杆和往复杆向左沿轴运动,同时杆件向上运动,进而带动杆件向上沿套杆内部轨迹运动,套杆既沿着往复杆套水平运动,也带动杆件运动。杆件带动通过铰链连接的滑块沿导轨向左运动。进而带动轮椅椅背向上运动,实现助起功能。当电机轴逆时针旋转时,带动螺旋式凸轮逆时针旋转,从而使得杆件能够向上运动和沿轴运动。同理,按下降按钮,可以控制电机轴顺时针旋转,当电机轴以顺时针方向旋转时,杆件向下运动和沿轴运动[9]。杆件上方通过铰链连接有滑块,滑块与附在轮椅座底部的导轨配合,可实现通过杆件的上下运动和轴向运动来控制轮椅座的翻转,从而实现助起功能。
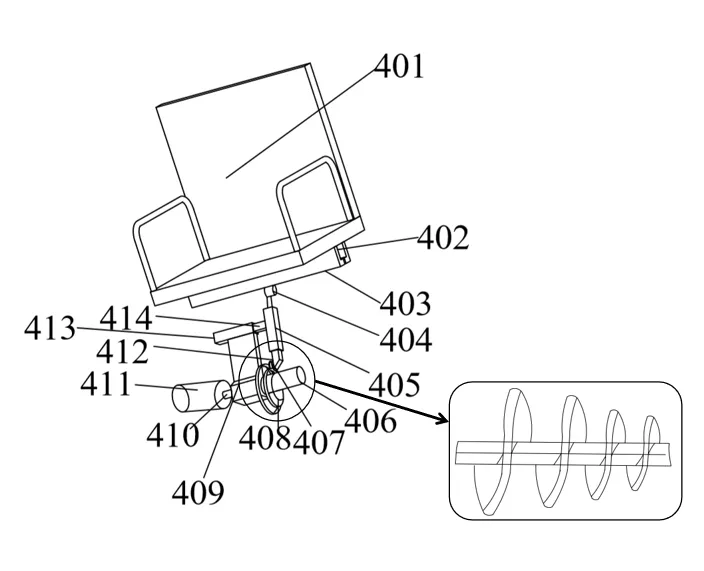
图4 助起装置结构示意图
3.3 跌倒自动检测报警系统
跌倒自动检测报警系统包括红外传感器、三轴加速度传感器、报警系统、控制系统、自动定位系统[10],如图5所示。红外传感器位于轮椅支架上,通过导线与控制系统连接。三轴加速度传感器接收端部分位于轮椅固定板上,信号源位于老人身上,控制系统位于轮椅座下方。报警系统包括警示灯和报警器,警示灯、报警器位于轮椅支架上,报警器上附着有自动定位系统。当老人推车跌倒时,此时安装于轮椅支架上的红外传感器感应到老人高度低于一定值,且与红外传感器串联的三轴加速度传感器检测到老人身上加速度的变化并发出信号,信号传导到控制系统上,控制系统接收信号并对信号进行综合分析,而后触发报警系统和自动定位系统,此时轮椅报警系统上的警示灯亮且报警器响,报警系统附着的自动定位系统再利用GPS定位技术,对轮椅进行定位,并把老人位置信息通过网络发送到老人子女手机上。
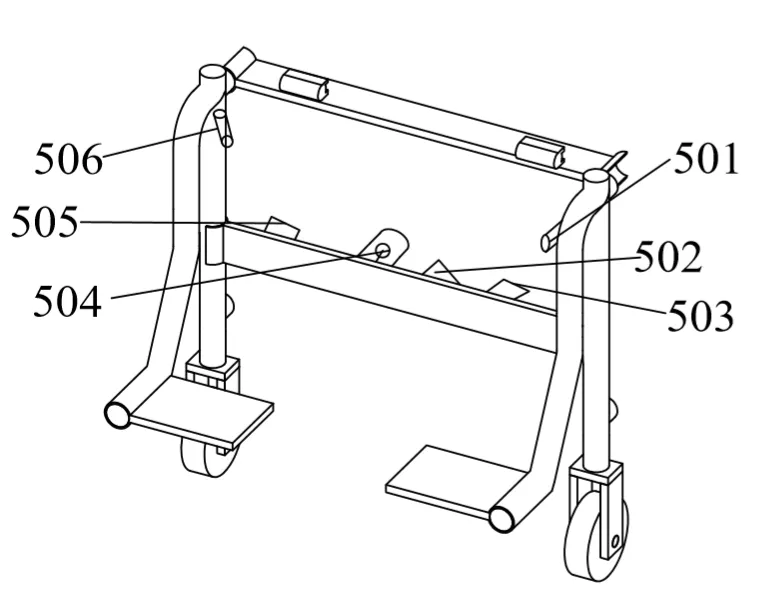
图5 跌倒自动检测报警系统结构示意图
4 结语
综上所述,本文设计的智能限速助起轮椅主要包括轮椅基体、智能限速装置、助起装置、跌倒自动检测报警系统。该轮椅利用编程控制电机正反转,控制轮椅上下翻转和限速。它能解决老年人起立不便及老人跌倒检测等一系列问题,为未来智能轮椅领域的发展提供技术参考。
猜你喜欢
上海建材(2022年3期)2022-11-04
数学小灵通·3-4年级(2020年3期)2020-06-24
建材发展导向(2020年4期)2020-03-25
煤(2019年12期)2019-12-12
电子制作(2019年20期)2019-12-04
小天使·一年级语数英综合(2019年4期)2019-10-06
电子制作(2019年10期)2019-06-17
电子制作(2018年19期)2018-11-14
电子制作(2018年9期)2018-08-04
天津诗人(2017年2期)2017-11-29