基于蝙蝠算法优化模糊神经网络的耙吸挖泥船耙头吸入密度研究
2022-03-17 10:18郝光杰俞孟蕻
计算机与数字工程 2022年2期
郝光杰 俞孟蕻 苏 贞
(江苏科技大学电子信息学院 镇江 212003)
1 引言
耙吸挖泥船疏浚施工过程中,泥沙依靠耙头挖掘产生,因此耙头挖掘效果直接影响到疏浚的生产效率[1]。耙头产量由吸入密度决定,因此对吸入密度建模分析尤为重要[2]。目前所知的耙头物理模型都基于一定的理想条件,例如保持土质类型不变,施工疏浚环境不变[3~4]。然而在实际施工中,同一地区土质类型多样,所面临的施工环境也不确定。因此通过物理建模难以建立有效的耙头模型。
文献[5]采用最小二乘法对吸入密度进行拟合,这种方法属于离线预测,不具有实时性。如果施工工况突然改变,这种测量手段失效。文献[6]采用遗传BP 对耙头建模分析,这种方法存在收敛速度慢,预测精度不高等缺点。
本文提出利用模糊神经网络(FNN)对耙头进行数据黑箱建模分析。模糊神经网络具有映射能力强、自学习及实时处理等优点,在轨道电路故障诊断[7]、配电网故障选线[8]以及高速行车时间预测[9]等领域效果明显。为了提高FNN 模型的泛化性能,有些文献采用粒子群算法[8]、遗传算法[10]对FNN 的连接权值和隐含层阈值进行优化。但是PSO 算法全局搜索能力有限,容易导致算法的复杂度提高;使用遗传算法容易产生早熟,局部最优等问题。在本文中采用蝙蝠算法[7]对FNN 进行优化,这种方法容易实现,与粒子群算法相比,结构简单,收敛性能更好。
2 耙头产量分析
2.1 疏浚数据分析
影响疏浚产量的因素一般可分为外界因素和内部因素[11]。外界因素主要为外界环境,例如风浪、沙床分布、土壤类型等[2,12]。内部因素耙头部分取决于耙头吸入密度,而吸入密度的大小又取决于高压冲水、泥泵转速、波浪补偿器行程等影响因子。根据施工人员现场经验与文献[13],本文选择了以泥泵转速、航速、高压冲水与对地角度以及吸入流量5 个输入量对吸入密度进行建模预测,如图1所示。
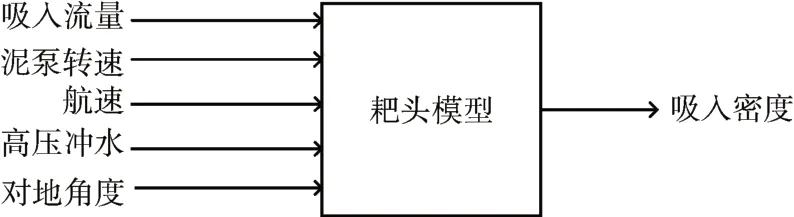
图1 耙头模型示意图
2.2 数据预处理
疏浚数据集为耙吸挖泥船从航行、挖泥装舱到抛泥整个流程,而我们所需的数据集主要集中在挖泥装舱阶段,需要对数据集进行有效整理,例如设置边界条件,考虑耙头吸入密度大于1 ton/m3以及正常施工时航速和泥泵转速的大小进行综合考虑,剔除无效数据。
施工数据采集于耙吸挖泥船各种不同的传感器和控制器,采集数据之间差异较大,量纲不一。为了避免数据大小对预测结果造成影响,对数据集进行归一化和标准化处理。
3 T-S 模糊神经网络
3.1 系统结构
T-S 模糊神经网络是一种if—then模糊规则来描述非线性系统的方法[7~8],具体结构如图2所示。
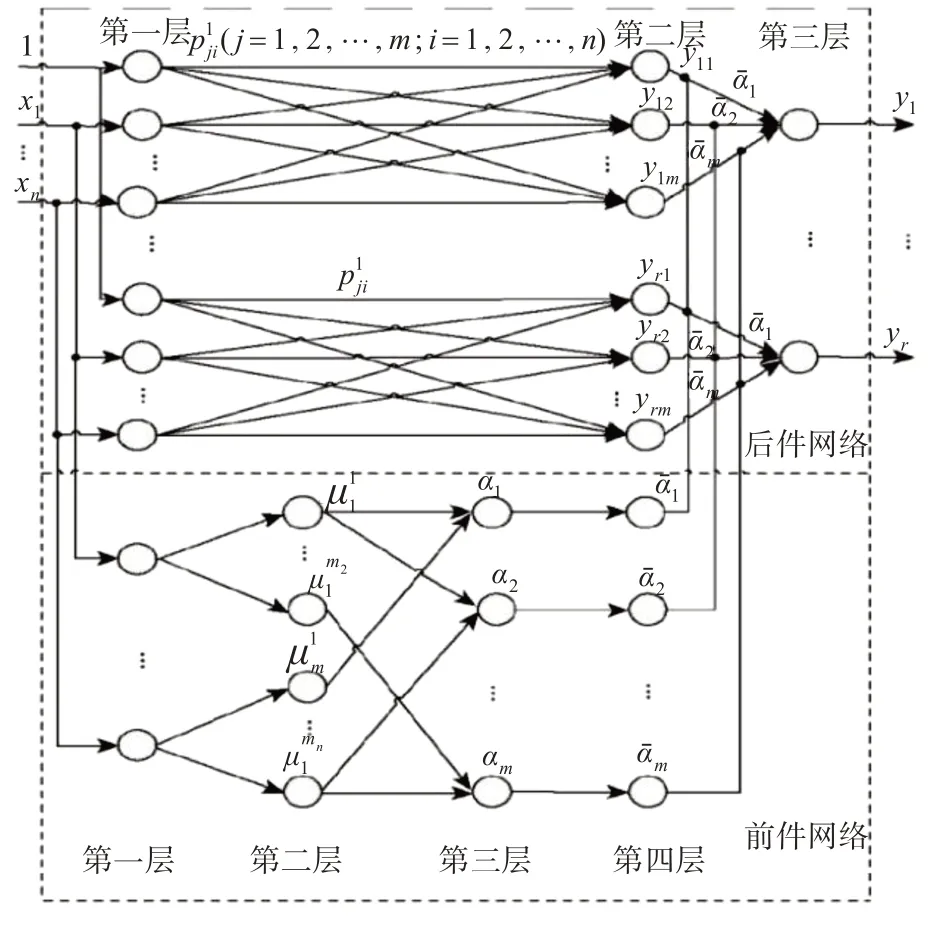
图2 T-S神经网络图
T-S 型模糊神经网络包括前件网络和后件网络。前件网络分为4 层,第一层是将输入量x=(x1,x2,…xn) 传送到第二层,该层节点数为N1=n。
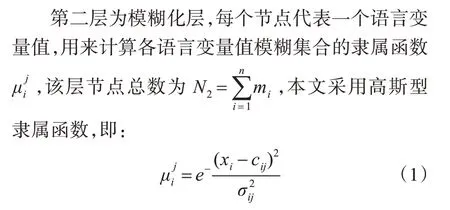
式中,cij、σij为隶属度函数的中心与宽度。
第三层为规则层,节点总数为N3=m,每一个节点代表一条模糊规则,它是用来匹配模糊规则的前件,计算出每条规则的适应度,即
3.2 学习算法

式中β>0为学习效率。
3.3 蝙蝠算法优化FNN模型构建
蝙蝠算法(BA)是一种高效的生物启发式算法,它的原理是模拟蝙蝠利用声呐来探测猎物[14~15]。这种算法全局搜索能力强,结构简单参数少,容易设置它的实现流程如下。
1)设置蝙蝠初始种群个数为n,最大脉冲音量为Amax,最大脉冲率为Rmax,搜索脉冲频率范围[Fmin,Fmax],音量衰减率为β,搜索频率的增强系数为μ,最大迭代次数设置为Nmax。
2)随机对蝙蝠的位置Xi进行初始化,计算当前适应度的好坏来寻找最优解Xbest。
3)每一代蝙蝠个体的搜索脉冲频率、速度和位置按以下方式进行更新:
式中:β和μ的取值范围为(0,1),一般设置为0.9。
6)对n 个蝙蝠个体的适应度值进行排序,找到当前最优解。
7)重复步骤2)~6),直到满足最大的迭代次数,得到最优连接权值和隐含层阈值。。
4 仿真实验与分析
4.1 数据来源
实验数据来源于长江口施工,数据点每间隔30s 采集一次。对疏浚数据进行预处理,得到12 个周期共4300 条数据,将其中10 个周期作为训练数据,剩余两个周期的数据作为测试数据。图3 给出了一个周期原始吸入密度数据分布图,共300 个点,时间为150min;其中挖泥装舱阶段数据点分布在[50,240],共190个样本点,时间为95min。
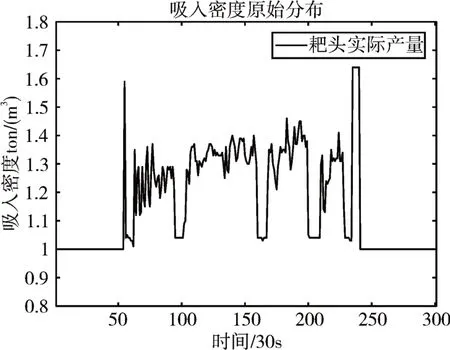
图3 原始数据分布图
为了使BA-FNN 耙头产量模型的预测性能更具有说服力,采用BP、FNN 进行实验仿真对比,并采用平均误差作为评价指标对预测结果进行衡量。
4.2 实验结果分析
实验中设置BP输入层神经元个数为5,隐含层神经元个数为12,输出层个数为1;模糊神经网络结构采用5-12-1,蝙蝠算法初始化种群为30,最大迭代次数设置为1000,蝙蝠脉冲响度Amax为0.6,最大脉冲率为Rmax为0.6,其中搜索脉冲频率范围设置为[0,2]。下面给出了两个周期吸入密度预测结果如图4、图5所示。
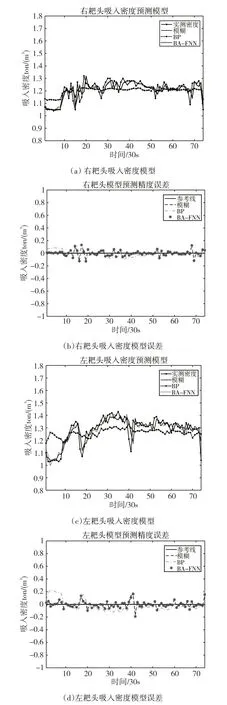
图4 周期1吸入密度预测

图5 周期2吸入密度预测
图4 为第1 个周期内3 种预测方法对左、右耙头产量进行预测的效果图以及误差对比图。第1周期为74个采样点,即耙吸挖泥船工作37min的耙头产量,从图4 中可以发现BP 神经网络的预测效果最差,FNN学习速度更快,泛化性能好于BP神经网络;通过对FNN 连接权值和隐含层阈值使用蝙蝠算法进行优化,FNN 预测效果得到了提升;在BP、FNN 以及BA-FNN 三者的预测效果上看,BA-FNN 预测效果相对于其他两种算法来说,预测效果更好,模型误差更小。图5 为第2 周期(一共70 个点,共计30min)耙头产量的预测效果图以及预测误差对比图。其中BP 预测效果不佳,预测误差也比较大,BA-FNN 预测效果比较明显。从实验训练时间来看,单个预测模型中BP用时最长,大约为900s,FNN 训练时间大约为560s;BA—FNN 的训练时间最短为435s。对3 种预测方法的平均误差进行统计,两个周期左、右耙头预测模型平均误差如表1所示。
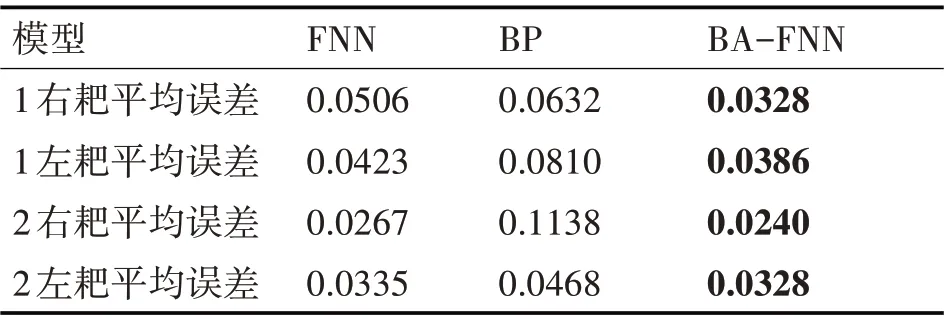
表1 各周期预测模型的平均误差
通过表1 可以看出,BA-FNN 的平均误差最小,预测精度高,经过上述两个周期的验证分析,结合实际的疏浚施工经验,上述BA-FNN预测模型产生的误差满足在疏浚要求的合理范围之内,因此该方法可运用于耙吸挖泥船耙头模型吸入密度的预测。
5 结语
1)使用蝙蝠算法解决了传统神经网络收敛速度慢,预测精度低的问题,优化T-S 模糊神经网络的参数,得到了T-S 模糊神经网络参数最优组合,克服了传统模糊神经网络参数确定难度大的问题,改善了模糊神经网络的泛化能力和自学习能力。
2)针对耙头产量进行分析,对吸入密度进行预测,并且借鉴于以往的研究成果,提出了蝙蝠算法优化T-S 模糊神经网络的方法对耙头吸入密度进行预测。实验结果表明采用BA-FNN 具有收敛速度快,预测精度高的优点,该方法在输出稳定性、收敛性和预测精度上也优于T-S 模糊神经网络。证明了采用BA-FNN对吸入密度预测精度更好,并验证了该方法在耙吸挖泥船耙头中预测吸入密度的可行性。该方法可以作为耙头产量吸入密度预测的一种技术手段,并为耙吸挖泥船耙头产量分析提供了一种科学有效的方法。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
知识就是力量(2022年6期)2022-06-16
中国教育信息化·高教职教(2022年4期)2022-05-13
煤气与热力(2022年2期)2022-03-09
科学与财富(2018年7期)2018-05-21
软件(2017年6期)2017-09-23
小溪流(画刊)(2016年12期)2017-02-04
发明与创新·大科技(2016年11期)2016-11-19
微型小说选刊(2015年5期)2015-06-05
小学生·多元智能大王(2014年5期)2014-07-24