
医院智能火灾机器人的设计
2022-03-16 05:25肖福娟侯甲童
医疗卫生装备 2022年2期
肖福娟,侯甲童
(1.山东药品食品职业学院,山东威海 264210;2.哈尔滨理工大学荣成学院,山东威海 264300)
0 引言
近年来,火灾救援机器人得到越来越广泛的研究。对于易发生火灾,但是不易展开救援的场合,尤其是易燃、易爆的地方,研究者们开展了救援机器人的结构、控制系统等方面的研究[1-2]。安装空间小、工作范围大的轨道式机器人具有移动速度快的特点,适合隧道的救援环境,已有专门的排烟机器人设计[3-5]。仓库中的火情在起始阶段不易被发现,后期灭火困难,因此研究者们开始研究采用视觉方式检测火灾的机器人,同时借助多种传感器进行火灾的排查[6-7]。此外,全向轮的消防机器人也被用于空间狭小的火情侦察和灭火[8]。以上几种机器人均适用于人员较少的地方,火灾排查和灭火往往不需要进行复杂的避障和灵活控制等操作,简单的定点灭火即可满足需求。
目前,火灾机器人的适用范围还比较窄,且智能化程度较低,往往不能满足复杂情况下城市火灾的灭火需要,如医院等人流密集场所的火灾[9-10]。在这些场所,火灾机器人既需要识别火灾,又需要及时开展灭火。另外,火灾机器人在遇到患者、医疗器械等障碍物时需要避障,同时根据现场情况需由人为远程控制进行定点灭火,难度较大。因此,为了保障医院等场所的消防安全,及时开展灭火救援,医院智能火灾机器人的研究迫在眉睫。本文设计一款基于Arduino的医院智能火灾机器人,可自动识别火灾、发送报警信息并自主灭火,还可远程控制进行特定区域的灭火。
1 需求分析
在医院环境中,需要及时发现火情、上报火情、现场处理火情,因此医院智能火灾机器人就需要具备火灾巡检、火灾报警、及时灭火3个方面的功能,并根据实际情况,在人员控制下前往指定区域工作。
一般门诊、科室、病房的清洁程度很高,环境较为友好,可以在医院现有的基础上,划定预设路线,机器人按照预定路线进行火灾巡检。然而医院内人员或移动的医疗设备较多,在遇到障碍物时,机器人需自主避障,避让障碍物后需重新寻找路线行进。在某些重点区域需要进行火灾检测和灭火,人员不方便到达时,可以采用无线通信的方式控制机器人来完成任务。
2 总体方案设计
本文设计的火灾机器人由上位机、下位机2个部分组成。上位机由手机端的App实现,上位机与下位机之间采用蓝牙无线通信技术进行信息交互。下位机采用Arduino UNO R3作为核心开发板,采用ATMEGA328P作为主控芯片。下位机接受上位机的控制,并能自动完成火灾巡检、火灾报警、自主灭火、行进与避障等工作。
火灾机器人可实现红外循迹、超声波避障、蓝牙控制、照明、火灾报警和灭火等功能,结构图如图1所示。火灾机器人实物图如图2所示,包括机器人主体和灭火模块控制电路板。其中,机器人主体集成了循迹、避障、照明、蓝牙模块,灭火模块控制电路板集成了温度传感器、烟雾探测器、报警模块等。
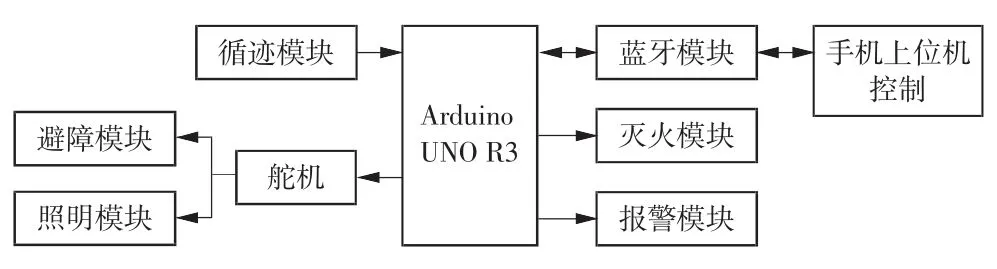
图1 医院智能火灾机器人结构图

图2 医院智能火灾机器人实物图
3 关键器件选型与硬件设计
医院环境中的设备使用尤其强调稳定性、可靠性,以尽可能地降低设备故障率,即使出现故障,也要快速定位问题,使设备恢复工作。采用模块化的器件选型、硬件设计以及后续模块化的软件设计,将大大提高火灾机器人的稳定性和可靠性,并提高其维护的效率,从而满足实际需求。
3.1 循迹模块选型与电路设计
为检测是否发生火灾,火灾机器人应前往各处进行巡回检查。巡回检查时,可按照设定路径循迹行走进行现场火灾检测。红外循迹是使用最广泛的循迹方式,其原理是红外线发射管发出红外线,当红外线接收管接收到反射的光线时,就认为检测到白线,然后输出高电平;当发射管发出的光线不能被接收时,就认为检测到黑线,输出低电平[11]。本研究选用四路循迹模块,如图3所示。利用该模块,可实现火灾机器人在医院内部进行火灾巡检,并快速到达火灾现场灭火。
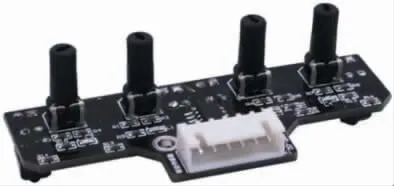
图3 循迹模块
循迹模块电路原理图如图4所示,其所用的4个红外传感器分别与Arduino UNO R3主控制板上的A1、A2、A3和A4端口相连。机器人走直线时,红外循迹模块中间的2个部分始终在黑线上,如果其中任何一个部分出现偏移,机器人会自动修正;如果最外侧的传感器检测到黑线,则机器人会以更快的速度修正到黑线上。
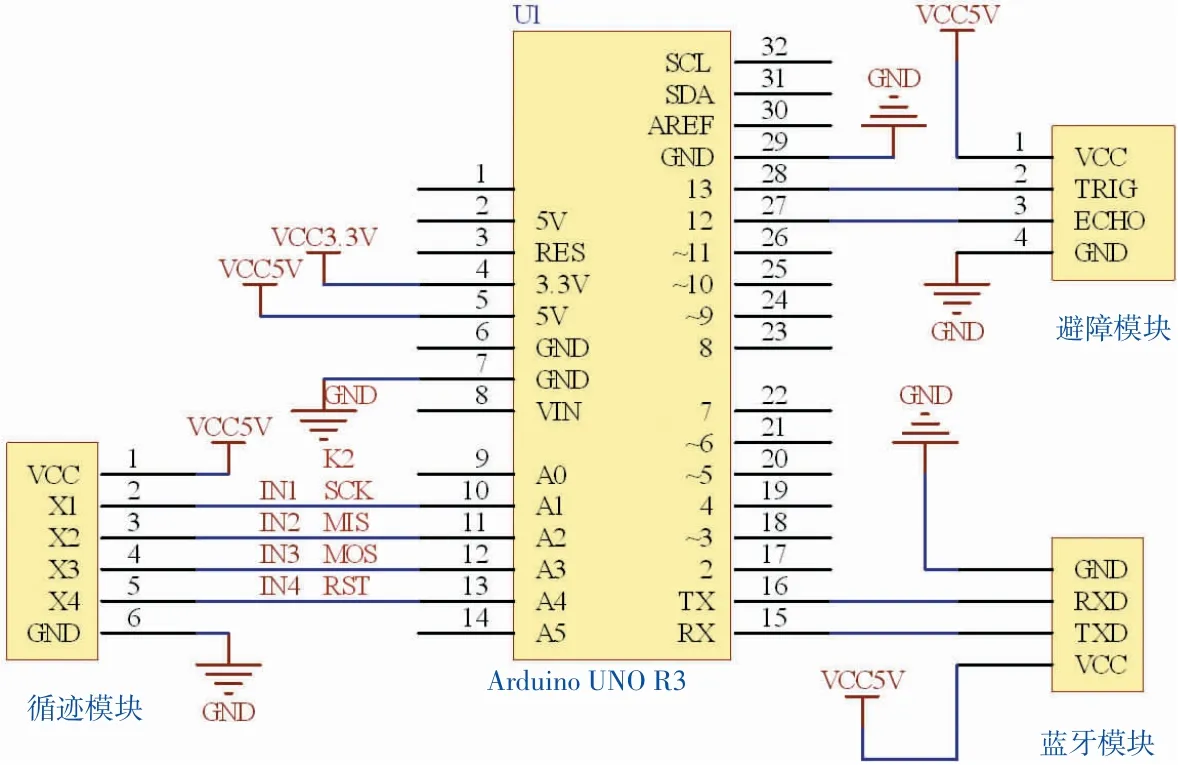
图4 循迹、避障、蓝牙模块电路原理图
3.2 避障模块选型与电路设计
火灾机器人进行火灾巡回检查时,可能会遇到障碍物,如何及时进行避障很重要。本研究采用超声波进行避障。超声波避障是利用超声波在环境中遇到某个物体时发生反射的原理进行避障[12-13]。本研究选用的避障模块SR-04如图5所示,该模块带有2个超声波探头,一个用来发射超声波,另一个用来接收反射回来的超声波,测量距离的范围最大可达5 m。在遇到人员障碍或者医疗设备阻挡时,火灾机器人可以绕过障碍物,继续按照预定轨迹前进。

图5 避障模块
避障模块电路原理图如图4所示,其工作原理是利用Arduino UNO R3主控制板上的引脚13向该模块的TRIG引脚施加一个至少为10μs的脉冲信号,用来触发该模块的距离检测功能。成功触发该模块后,该模块内产生8个40 kHz的超声波脉冲给Arduino UNO R3,并自动判断是否还有超声波信号。当检测到返回信号时,计算出距离并进行避障。
3.3 蓝牙模块选型与电路设计
火灾机器人在循迹行走、避障、灭火等过程中,如遇到紧急情况,可由人员进行无线控制,并对紧急情况进行处理。本文采用蓝牙通信的方式对火灾机器人进行控制信息的传输。蓝牙模块选择JDY09 4.0(如图6所示),该模块适用于遥控机器人、智能家居等方面,具有成本低、功耗小、灵敏度高等特点,可以作为与其他医疗设备或辅助设备的连接端口,在后续的使用中开发扩展功能。当现场设备发生故障或有火灾隐患时,火灾机器人能及时收到信息并前往处理。

图6 蓝牙模块
蓝牙模块电路图如图4所示,JDY09的RXD和TXD分别连接Arduino UNO R3主控制板的TX和RX,该模块自带的发光二极管用来显示该模块是否已连接,未连接时发光二极管闪烁,连接后常亮。
3.4 灭火模块选型与电路设计
灭火模块采用STC89C52作为主控芯片,实现医院的火灾报警和灭火功能。灭火模块结构图如图7所示。
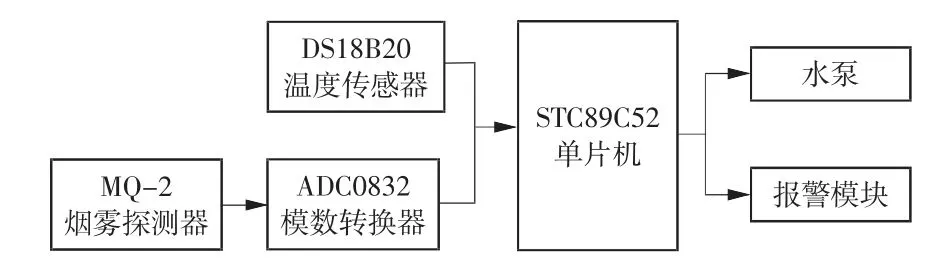
图7 灭火模块结构图
火灾发生时,空气中的烟雾浓度增大,温度升高。在此种情况下,快速有效的烟雾浓度和温度值检测成为火灾救援的关键。本研究选用MQ-2烟雾探测器(如图8所示)进行环境中烟雾浓度的检测,当传感器接触到烟雾时会引起传感器的半导体表面的电导率发生变化,烟雾浓度越高,电导率也就越高,输出的电阻就越低[14]。

图8 MQ-2烟雾探测器
本研究采用DS18B20温度传感器进行温度检测(如图9所示)。DS18B20是数字温度传感器,测温范围广,最高可达125℃[15-16]。当检测到环境温度大于设定温度时,传感器会启动报警,并根据判断进行下一步动作。

图9 DS18B20温度传感器
灭火模块的电路原理图如图10所示。MQ-2烟雾探测器的输出引脚连接到ADC0832模数转换器的CH0引脚,由ADC0832模数转换器对输入的信号进行AD转换。DS18B20温度传感器的DQ引脚连接STC89C52单片机的P1.0,直接将数字量传送给STC89C52单片机。
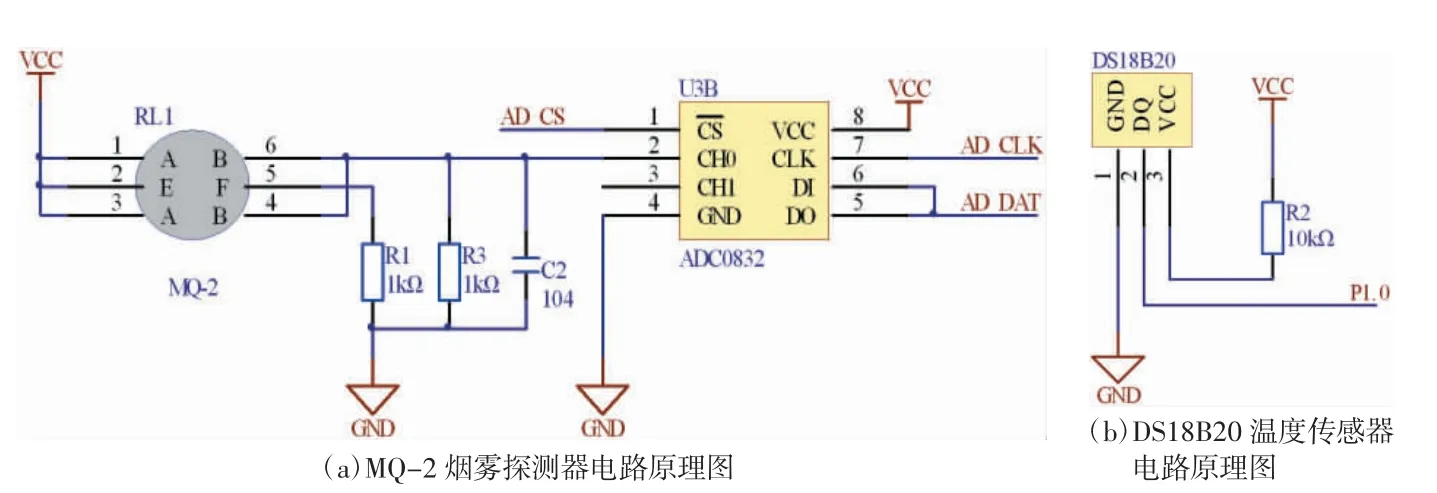
图10 灭火模块电路原理图
3.5 报警模块选型与电路设计
当检测到现场发生火灾时,首先进行本地声光报警,同时通过远程通信的方式进行火灾情况报警。本研究采用SIM800L实现远程通信并进行火灾报警(如图11所示)。该模块可用锂电池供电,也可用5 V供电。该模块尺寸小巧,可支持多种网络,串口为晶体管-晶体管逻辑(transistor-transistor logic,TTL)电平,可直接与STC89C52单片机相连。

图11 报警模块
报警模块电路原理图如图12所示,STC89C52单片机的P3.0和P3.1引脚连接报警模块,当温度传感器或烟雾探测器检测到环境中的情况并返回给单片机时,报警模块会给预先设定的手机号码发送短信。
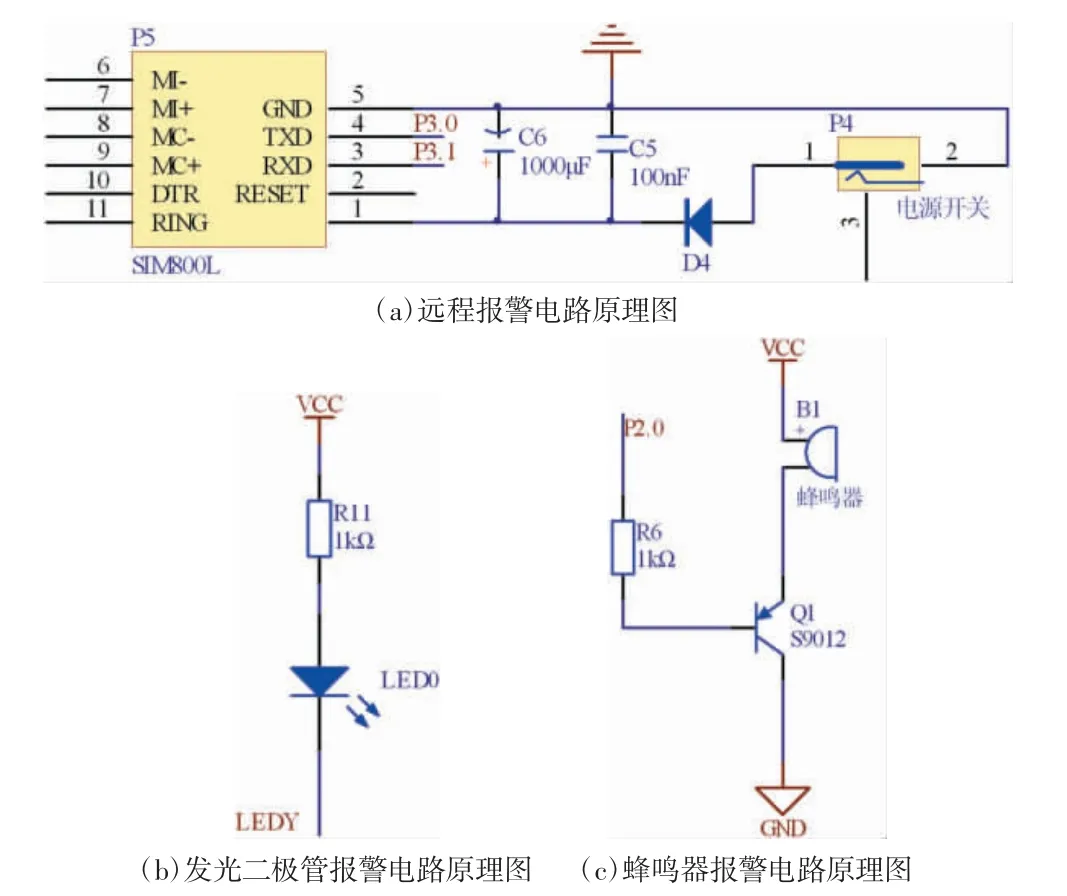
图12 报警模块电路原理图
在发光二极管报警电路中,发光二极管的阴极由STC89C52单片机引脚控制,在需要灯光报警时,由单片机的引脚P2.4输出低电平,发光二极管亮,显示灯光报警。蜂鸣器由PNP三极管S9012驱动,当需要声音报警时,由单片机的引脚P2.0输出低电平,引发蜂鸣器发出报警。
4 软件设计
模块化的软件设计可以在医院环境的现场调试中缩短调试周期,使火灾机器人尽早投入使用,且在后续的扩展应用中,具有很高的兼容性,便于升级改造。
4.1 灭火主程序设计
首先,对LCD1602显示屏进行初始化设置,显示设定的安全值、实时的温度值、烟雾浓度值;然后,STC89C52单片机对温度传感器采集到的温度值和经ADC0832模数转换器转换过的烟雾信号进行处理。单片机在得到温度与烟雾浓度的数据后进入判断子程序,判断采集到的温度值与烟雾浓度值是否超过设定的安全值。若检测到的数值中有一项的数值超过设定的安全值,或者2项都超过安全值,首先单片机控制发光二极管和蜂鸣器进行声光报警,然后报警模块接收到单片机发出的信号,向预设的手机号码发送短信报警,最后水泵喷水灭火。若二者中的任意一项都没有超过设定的安全值,则实时的环境温度值和烟雾浓度值会在LCD1602显示屏上显示出来。灭火程序设计流程图如图13所示。
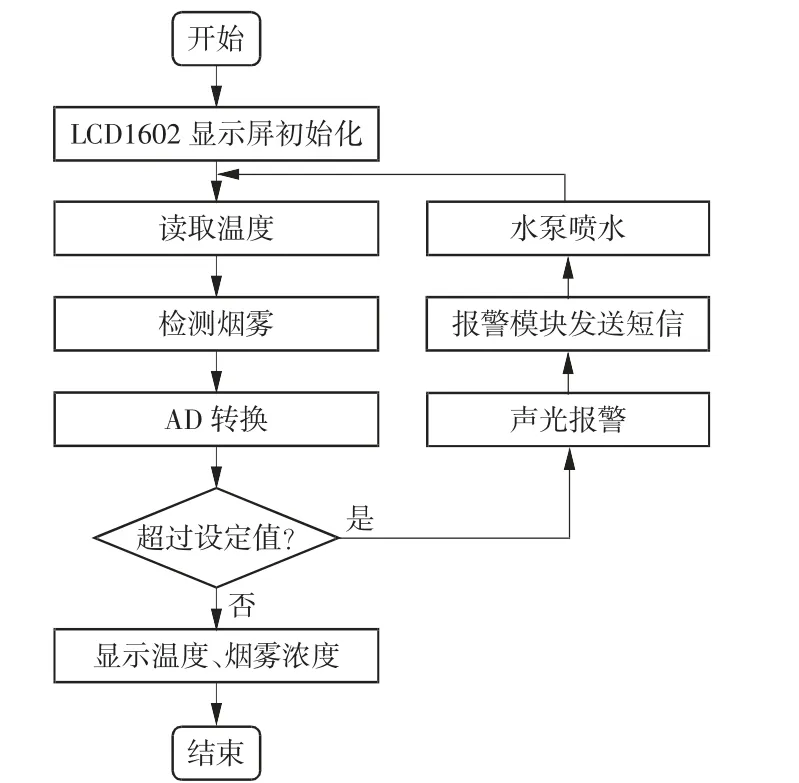
图13 灭火程序设计流程图
4.2 循迹程序设计
火灾机器人的循迹程序设计流程图如图14所示。循迹程序运行时,首先,初始化机器人的各个传感器、工作状态和延迟功能等。如果黑线位于机器人的中间,机器人会向前行进。机器人向前行进时,右边的红外传感器检测到黑线,表明机器人应向右转向,程序将通过差速控制机器人向右转,反之则控制机器人向左转。
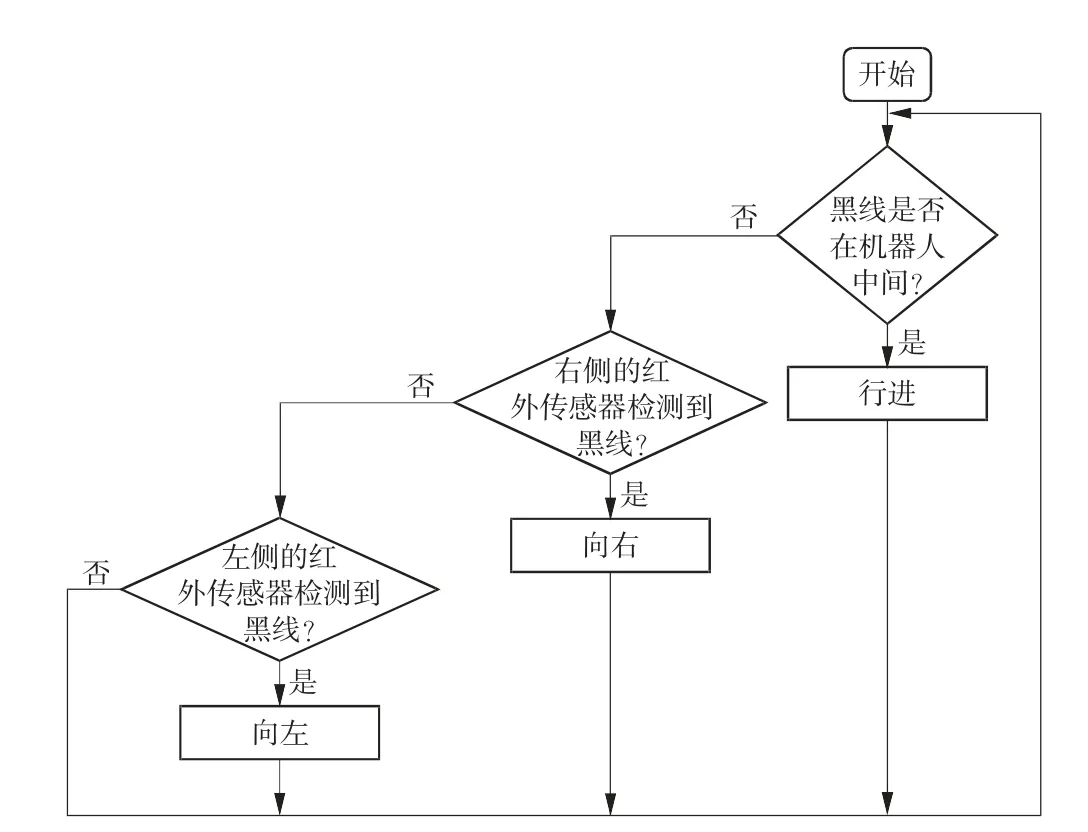
图14 循迹程序设计流程图
红外循迹示意图如图15所示,红色灯亮代表红外传感器检测到黑线,对应的红外传感器为低电平,红外管亮。
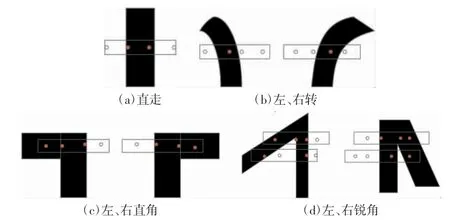
图15 红外循迹示意图
4.3 超声波避障程序设计
火灾机器人使用避障模块和车辆底盘前部的舵机探测在行驶中是否存在障碍物。在行进过程中,机器人可能会遇到不同方向的障碍物,通常是左侧、右侧和前方。在舵机的驱动下,避障模块可以连续检测到左、前和右方向上的障碍物。当障碍物出现时,机器人根据这3个方向判断与障碍物的距离,从而做出自动避开障碍物的决定。为了让机器人采取有效行动避开障碍物,有必要在这3个方向开发避障算法,以准确评估障碍物的位置信息。避障程序设计流程图如图16所示。
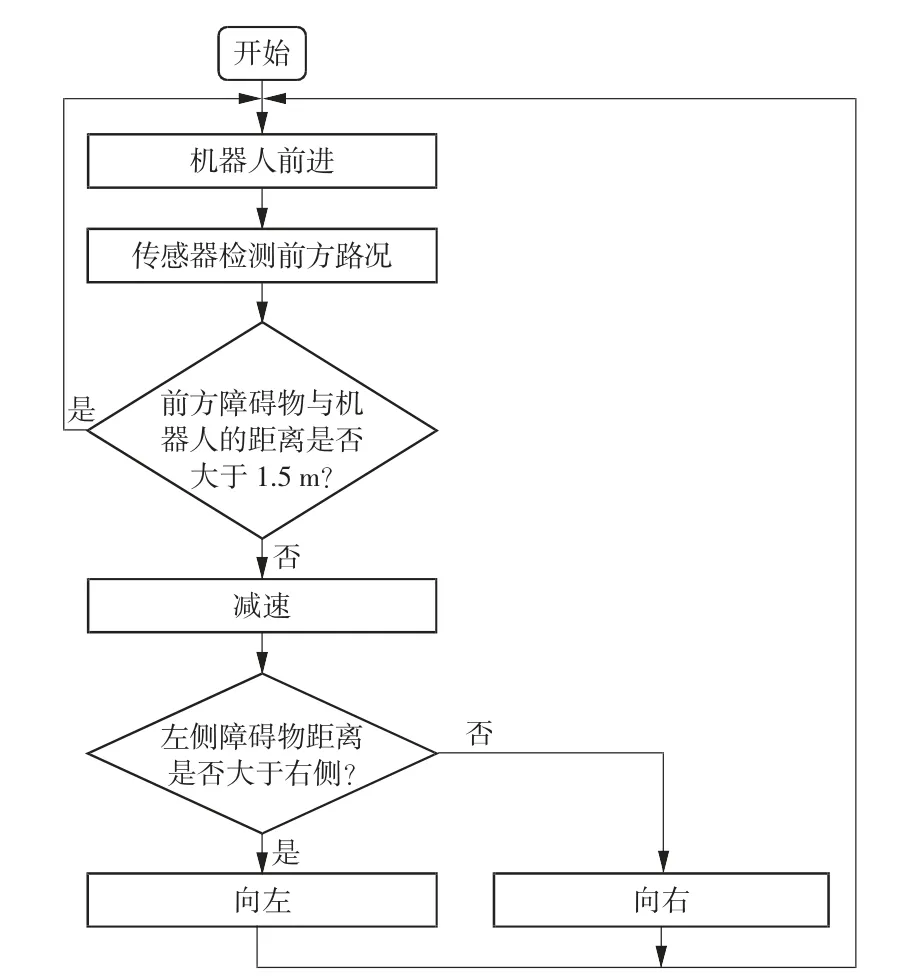
图16 避障程序设计流程图
5 运行与调试
5.1 避障功能调试
避障模块运行结果如图17所示,舵机云台搭载避障模块,不间断地检测前方障碍物,检测范围达到180°。在1.5 m的范围内,当检测到障碍物时,返回遮挡信号,火灾机器人主动转向进行避障,然后按避障后的方向继续行进。多次调试后发现,机器人对于1.5 m的距离非常敏感,在(1.5±0.1)m的范围内,可以精确识别障碍物,与文献[17]对比,这一指标具有优势。在机器人循迹的行进过程中,若遇到障碍物,则减速绕行。在绕行的过程中,若存在另一个障碍物,如墙壁等,如果避障模块未能及时旋转至新的行进方向,则不能检测到墙壁,就会在绕行的过程中撞击到墙壁,待该模块旋转检测到障碍物后,再重新规划避障路线。
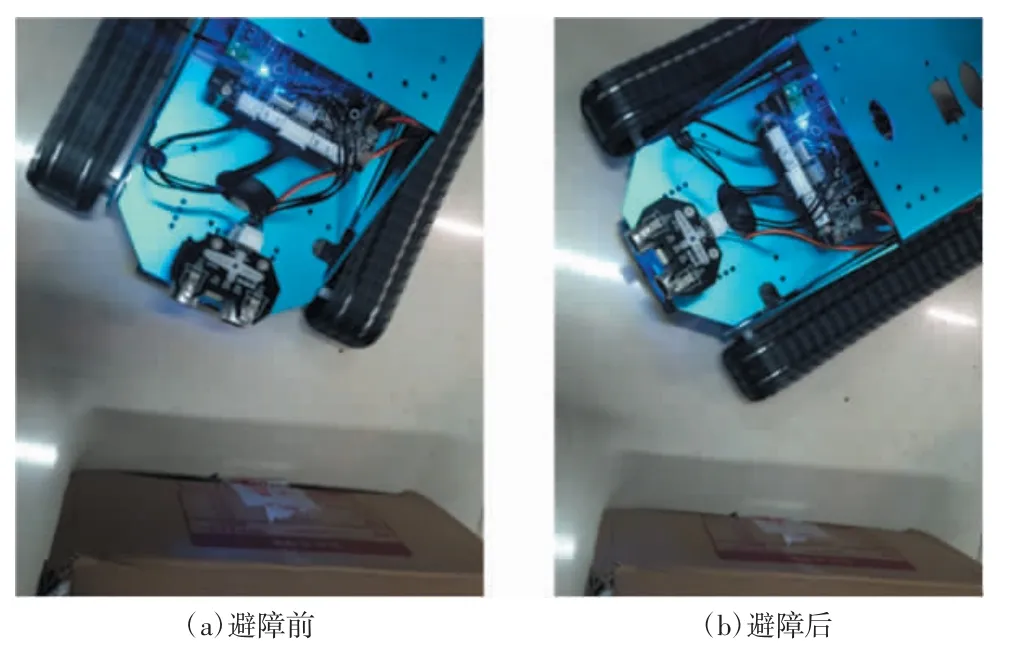
图17 避障模块运行结果
5.2 循迹功能调试
循迹模块运行结果如图18所示,循迹的黑线使用的是黑色胶带,宽约3.5 cm。火灾机器人通过四路循迹模块的4个红外传感器检测黑线,根据设计的运行程序,4个传感器的高低电平逻辑关系对应行进的方向。经过调试发现,在0.5 m/s的速度之内,机器人可以无偏差地沿着预定轨迹行进,这一指标优于文献[18]中的最大速度。若机器人行进速度超过0.5 m/s,左右锐角的循迹会产生轨迹的偏移,无法完成正确的循迹,这是由行进速度过快,机器人无法及时调整偏转角度导致。
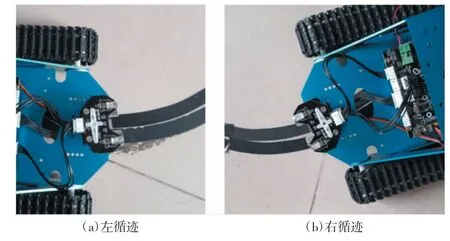
图18 循迹模块运行结果
5.3 照明功能调试
照明模块运行结果如图19所示。使用不同颜色的照明光来对应舵机的转角,可以较为明确地指示机器人接下来的行进方向,便于确认所转向角度是否合理。本系统采用舵机搭载的RGB三色LED,可根据舵机转过的角度执行对应的照明显示程序,发出不同颜色的光。根据设计与调试时的现象,当舵机转向45°时,三色LED全亮,为白色;当转向135°时,蓝色LED亮,显示蓝色光。照明功能较好地实现了转向功能的指示。
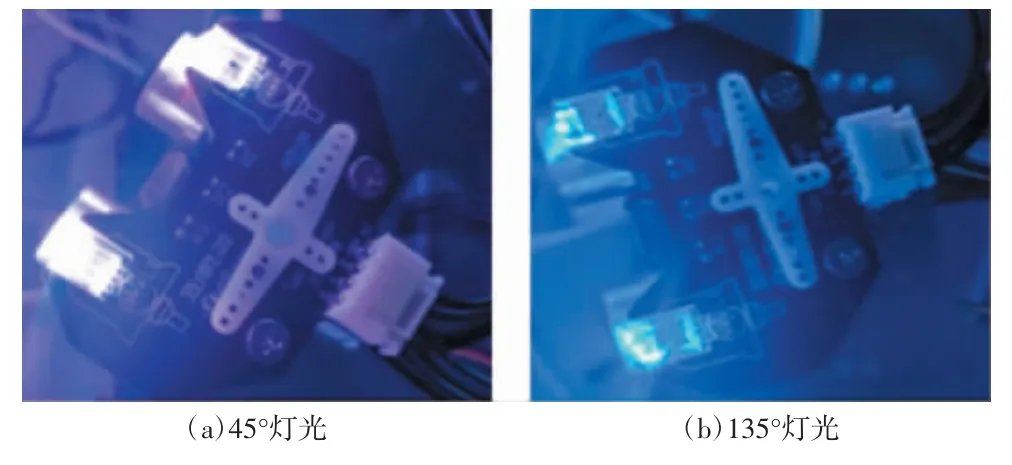
图19 照明模块运行结果
5.4 火灾检测、报警、灭火功能调试
当实时检测到的环境温度值超过设定的阈值50℃或检测到的烟雾浓度值超过设定的安全值500 ppm(1 ppm=1×10-6)时,蜂鸣器和发光二极管会发出本地的声光报警,通过报警模块发送火灾信息,之后水泵开始工作,喷水灭火。MQ-2烟雾探测器也可检测挥发性气体的浓度,当无火灾发生时,若环境中的可挥发性气体浓度过高,也会引发报警。但若此时温度并无异常,人员接收到报警信息后,可根据具体情况进行处理。
5.5 蓝牙控制调试
蓝牙模块可以被设置为主机或者从机的工作方式。在使用蓝牙模块前,通过数据线将计算机与蓝牙模块相连接,使用串口助手软件,对蓝牙模块的工作方式进行设置。串口助手发送AT+ROLE指令,返回OK则表示设置成功。其中,Param为1时为主机工作方式,为0时为从机工作方式。本设计中,蓝牙模块被设置为从机工作方式。
蓝牙模块的从机工作方式设置完毕后,使用亚博智能科技有限公司的Android App控制机器人运行,并采用串口通信进行信息传输。App共分为2个操作界面,一个为模式选择界面,如图20所示;另一个为行进控制界面,如图21所示。人员可通过App发出串口指令,控制机器人运行。App右上角可显示机器人供电锂电池的电量,并且行进控制界面可显示超声波避障的距离。
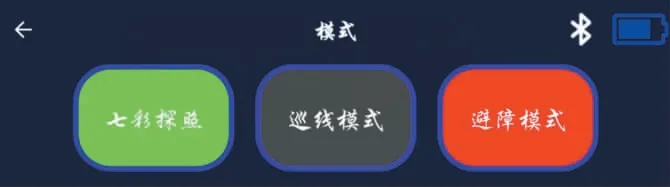
图20 模式选择界面
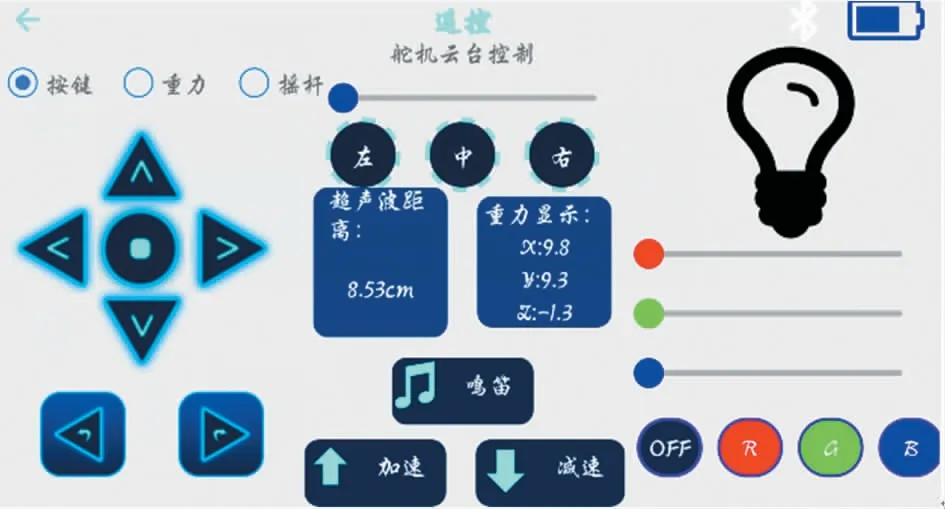
图21 行进控制界面
6 结语
本文设计的具有超声波避障、红外循迹、灭火、报警、手机App控制等功能的医院智能火灾机器人以Arduino UNO R3为核心开发板,使用ATMEGA328P作为主控芯片来实现避障、循迹、蓝牙控制、照明等功能,灭火与报警功能则使用STC89C52作为主控芯片。经运行调试后,机器人满足医院内基本使用需求,且操作简单、控制灵活、运行时可靠性高。本机器人虽然在医院等场合较为适用,但尚存在不足之处:(1)行进速度较为缓慢,没有实现快速移动;(2)目前采用电池供电,每次运行的时间较短;(3)没有和现有的医疗设备相关联,在医疗设备发生故障有火灾隐患时,无法及时发现。以上不足之处,将在后续的研究中进行完善。
猜你喜欢
计算机测量与控制(2021年6期)2021-06-30
小学阅读指南·低年级版(2021年3期)2021-03-19
动漫界·幼教365(中班)(2020年3期)2020-04-20
华人时刊(2019年13期)2019-11-26
创新作文(1-2年级)(2019年4期)2019-10-15
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
好孩子画报(2019年10期)2019-01-10
当代陕西(2017年12期)2018-01-19
电脑知识与技术(2017年5期)2017-04-08
科学启蒙(2014年12期)2014-12-09
