
基于肝脏物理模型的虚拟手术交互仿真研究
2022-03-16 05:25:06韩泽杰李健祺金国斌易子渊
医疗卫生装备 2022年2期
韩泽杰,李健祺,金国斌,易子渊,杨 景
(浙江理工大学机械与自动控制学院,杭州 310018)
0 引言
机器人技术在手术、康复等众多医疗领域的应用正在不断地改变传统的医疗方式[1-3]。腹腔镜手术机器人作为典型的操作型医用机器人,在腹腔微创手术中,相比传统外科手术,具有目标定位精确、可进行远程手术等优点[4-5]。但与传统的外科手术不同,在腹腔微创手术中,医生必须经过专业的训练之后才能进行相关的手术操作。目前,一般的训练方法主要有体模操作训练法、虚拟现实法和活体动物组织训练法[6-7],其中,虚拟现实法是医生通过操作主手控制虚拟手术器械对人体虚拟组织进行训练操作,与实际情况更为接近,而且训练的效果也更加明显[8]。
软组织作为虚拟仿真系统中的被操作对象,其形变模型和力学模型分别为医生在模拟手术过程中提供视觉和力觉反馈,为手术交互响应的实时逼真表现起到重要作用[9-10],而不合适的软组织模型会造成手术仿真系统中器械与软组织的交互临场感欠佳。软组织的形变模型为虚拟系统的人机交互过程提供视觉反馈,因此形变模型的准确性和实时性对交互过程具有重要意义。英国帝国理工学院Camara等[11]基于动态位置和形状匹配约束方法表征软组织的形变过程,但该方法不仅依赖于定义的刚度参数,还依赖于时间步长、求解迭代次数、所采用的聚类数量和形状匹配约束。上海交通大学Luo等[12]采用基于物理的混合建模方法模拟血管介入手术中的导管和导丝的复杂行为,该方法还可以通过处理各种倾斜的导丝在实时交互中产生不同的触觉反馈。南昌大学Zhou等[13]利用麦夸尔特算法拟合问题域边界的节点位移,并获得软组织表面变形与力之间的关系,该算法既能实时模拟变形,又能保持变形模型的物理性质的真实性。澳大利亚皇家墨尔本理工大学Zhang等[14]利用能量平衡的方法建立了软组织的形变模型,通过改变指定应变能密度函数调节软组织材料的特性。美国维克弗里斯特大学Zhang等[15]提出一种综合生物力学和统计学习模型,以提高面部组织行为预测的准确性和可靠性。法国国家信息与自动化研究所Peterlík等[16]采用最近点迭代法和基于线弹性的生物力学模型来描述软组织的大形变。准确地表征软组织的机械行为是高逼真度力反馈的基础,对监控和预测软组织在手术操作中的状态至关重要[17]。南昌大学Xu等[18]将黏弹性融入到软组织的视觉模型中,以此作为交互过程中的软组织的物理模型,该模型能够以很小的计算成本模拟和可视化组织黏弹性的特性。西班牙萨拉戈萨大学Niroomandi等[19]将广义分解应用到软组织非线性和超弹性的数值模拟方法中,以提高模拟的实时性。综上所述,目前国内外研究人员对软组织的形变模型进行了多方面的深入研究,但由于软组织的力学特性极其复杂,确定其物理模型参数仍然是虚拟物理模型中的难点,同时如何在虚拟手术仿真过程中对其进行逼真的力反馈也是亟待解决的问题。
本文结合之前对肝脏组织力学特性的研究,建立了有限元模型与机械系统动力学自动分析(automatic dynamic analysis of mechanical systems,ADAMS)离散单元组合模型,通过2种模型的力学响应对比确定虚拟仿真系统中的肝脏组织质点-弹簧物理模型的参数,并搭建虚拟手术仿真系统进行仿真分析,为虚拟模型参数的确定提供一种可行的选取依据。
1 手术机械臂结构介绍
在手术过程中,医生通过操作主手来控制从操作手系统以完成手术操作。从操作手系统包含1条持镜臂与2条(或3条)持械臂,持镜臂末端安装有腹腔镜,为医生提供患者的腹腔手术视野;持械臂末端安装微器械,用于执行处理病灶组织的手术操作,在手术过程中持械臂末端安装的微器械直接与软组织发生接触。
本文所采用的手术机械臂结构包括移动平台、远心点调整机构、主动关节3个部分,结构如图1所示。前4个关节(升降关节:关节1,旋转关节:关节2~4)作为被动关节用于调整远心点的位置,主动关节部分(关节5~8)则用来执行医生的手术操作,实现末端夹持的腹腔镜的视野调整或者微器械的手术操作。

图1 手术机械臂结构示意图
2 虚拟系统主从映射研究
持械臂在手术过程中的调整过程如图2所示,本文选用Geomagic touch作为主从系统的主手,医生根据手术过程中腹腔镜所提供的视觉反馈调整主手动作,通过主从映射实现手术器械从当前位姿到目标位姿。手术器械直接对软组织进行操作,两者交互的作用力要通过主手反馈到手术医生,使医生能够感受手术中的力,避免用力过大对软组织造成二次伤害。
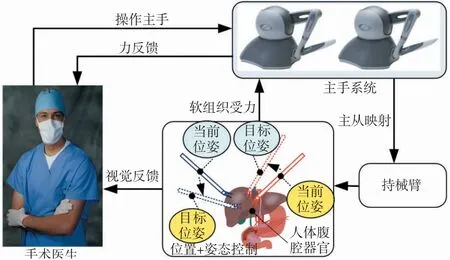
图2 手术过程中持械臂调整过程
本研究建立的持械臂主动关节的运动学坐标系如图3所示。由于被动关节在手术过程中处于锁定的状态,本研究将第五主动关节坐标系x5y5z5作为主动关节部分的基础坐标系,令主动关节基础坐标系相对于自身基座坐标系的位姿矩阵为TOins。考虑到主手自由度的分布,本研究将持械臂的自由度进行分解,将θ5、θ6、d8作为持械臂的腕点位置自由度,θ7、θ9、θ10作为微器械部分的位置自由度。
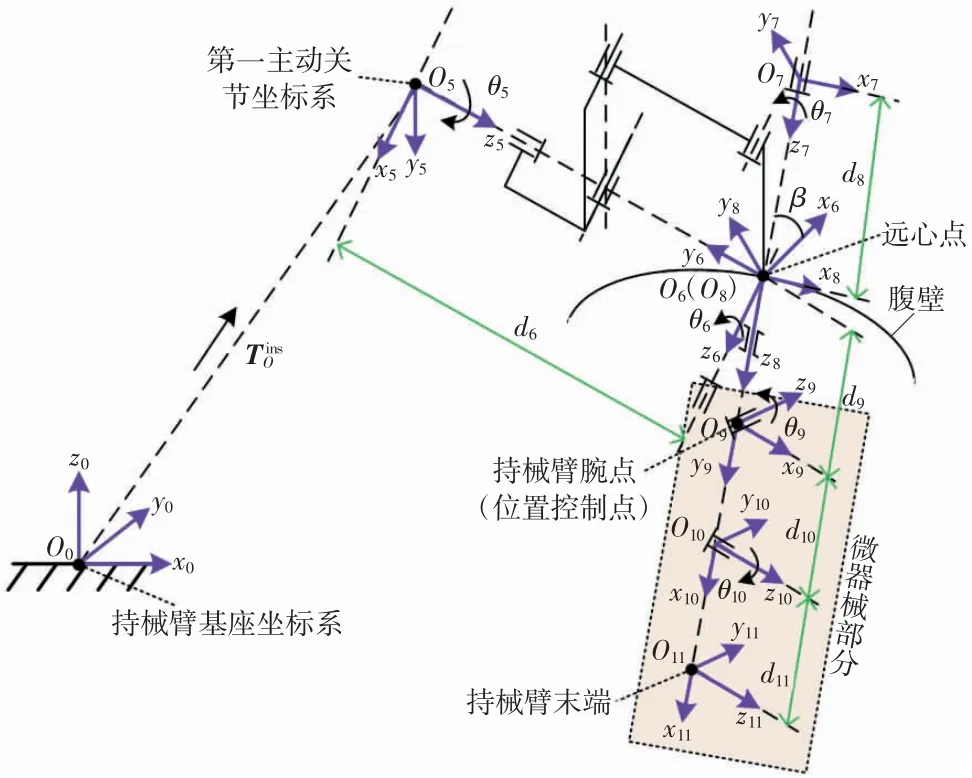
图3 持械臂主动关节的运动学坐标系
考虑到持械臂的自由度布置,本研究选择位置增量式控制作为持械臂腕点位置的主从映射,选择关节比例控制作为微器械部分的主从映射。医生通过操作主手动作,考虑到主手的自由度分布[20],主手的前3个自由度用于控制持械臂腕点的位置,主手的后3个自由度用于控制微器械部分的位置。腕点位置的主从控制与之前研究的持镜臂的主从映射方法相同[20],同样进行2次抖动消除。微器械部分的自由度通过主手的姿态自由度与微器械的部分自由度在关节空间内映射,主手3个姿态自由度的转角增量分别对应微器械部分的3个自由度转角增量。持械臂系统完整的主从映射控制流程如图4所示。
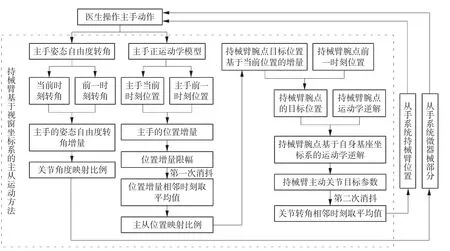
图4 持械臂系统完整的主从映射控制流程
3 虚拟肝脏组织物理模型
3.1 物理模型参数确定方法
针对虚拟肝脏组织的物理模型,本文采用结构简单且实时性好的质点-弹簧作为肝脏组织物理模型的基本元素。质点-弹簧模型是在2个节心点之间通过基本离散单元(选择Kelvin模型作为基本离散单元)实现连接,基于质点-弹簧的软组织物理模型原理如图5所示。
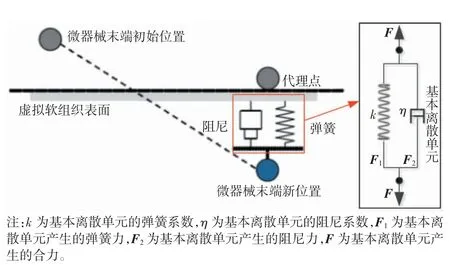
图5 基于质点-弹簧的软组织物理模型原理
基于肝脏组织的力学模型参数[21],建立软组织样本的有限元模型(样本直径d=20mm,样本高度h=20mm),模型相关设置与之前相同,如图6(a)所示。遍历虚拟肝脏模型的相邻节点之间的距离,求解得到相邻节点之间的平均距离为3.53mm,在ADAMS软件中建立正交方向节点距离为3.5mm的离散单元组合模型,如图6(b)所示。
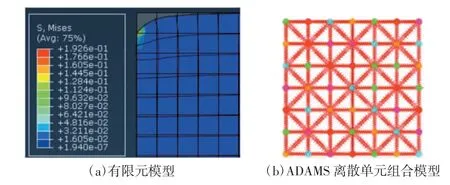
图6 软组织有限元模型与离散单元模型
为有限元模型中心节点添加v=2mm/s的加载速度,加载位移为2mm。通过有限元仿真可以得到在给定加载条件下的肝脏组织力学响应曲线,在ADAMS中给定离散单元组合模型同样的加载条件,可以得到其响应曲线,通过修改离散基本单元的弹性系数和阻尼系数可以使得2个模型得到的力学响应接近,最终确定离散基本单元的参数为k=0.01N/mm,η=0.095N/(mm·s)。
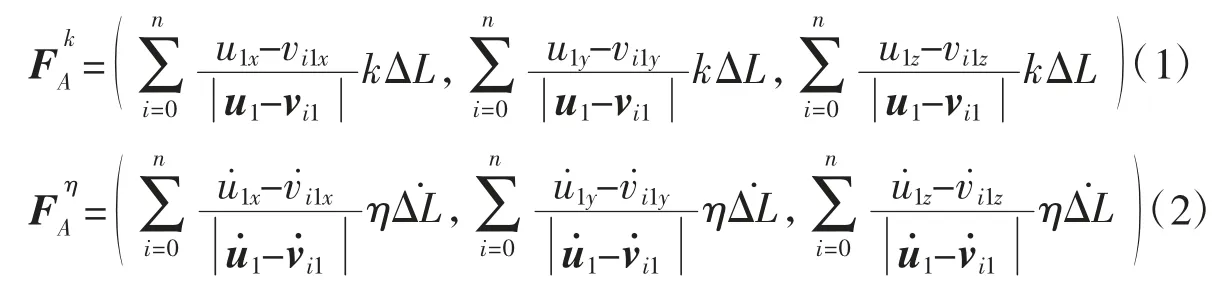
在建立虚拟肝脏组织的几何模型时,本研究已经将几何模型的分层质点之间关联,当碰撞发生时,碰撞质点会带动与之关联的质点运动,从而实现虚拟软组织的形变过程。假设顶点A为某个发生形变的碰撞点,对于顶点A,假设其发生形变前的空间坐标向量为u0={u0xu0yu0z},发生形变后的空间坐标向量为u1={u1xu1yu1z},取下一层质点中与其相邻的顶点Bi,假设其发生形变前的空间坐标向量为vi0={vi0xvi0yvi0z},发生形变后的空间坐标向量为vi1={vi1xvi1yvi1z},则可以得出第2层质点作用于A点的力为
3.2 虚拟手术系统仿真
结合之前建立的手术机械臂的虚拟模型,操作者通过操作主手和主从运动控制算法实现手术机械臂在虚拟环境中的运动。当通过碰撞检测算法检测到微器械末端与虚拟软组织发生碰撞时,软组织的形变模型和物理模型就能够实时计算微器械“浸入”虚拟软组织时的位移与反馈力,虚拟软组织位移通过显示器反馈给操作者,反馈力则通过主手反馈给操作者。搭建的虚拟手术仿真系统框架如图7所示。
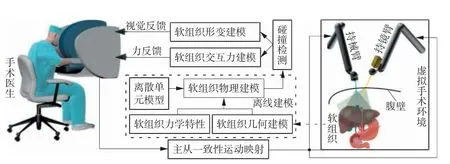
图7 虚拟手术仿真系统框架
为了使搭建的虚拟手术仿真系统具有通用性,本文采用大多数科研单位常用的PC平台,操作系统采用64位Windows 7系统,开发环境为OpenGL开放工具库,并在微软基础类库(Microsoft foudation classes,MFC)中搭建交互界面。首先利用现成的三维渲染软件3ds-Max对原始模型进行预先处理,预先处理主要包括模型曲面的细分和三角面片的处理;然后将模型的3DS文件导入到C++程序中,读出模型的顶点及面片信息,并在OpenGL进行三维重建;最后采用OpenGL在虚拟环境中添加光源、材料属性等属性参数渲染虚拟手术场景,并且将虚拟手术过程动态地显示在屏幕上,模拟实际手术操作。
对虚拟手术仿真系统的主从控制进行仿真研究,将前面章节的运动控制算法融入到虚拟手术仿真系统中,搭建的虚拟手术仿真系统如图8所示。在该仿真系统中可以实现以下功能:
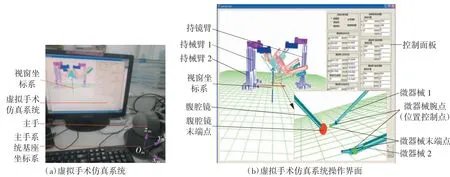
图8 虚拟手术仿真系统
(1)通过控制主手实现在视窗坐标系下的运动一致性,即主手的运动方向与从操作手的运动方向一致。
(2)利用复选框按钮切换主手的控制对象,在切换过程中腕点的位置保持不变。
(3)通过编辑框实现对持镜臂及持械臂的离线调整,即实现术前规划过程,并在主从控制过程中实时显示从操作手的末端操作点位置和关节转角参数。
手术机械臂的主从运动仿真结果如图9所示,从图中可以看出通过主手的动作可以实现在视窗坐标系下从操作手相同运动方向的动作。
对虚拟手术仿真系统中的虚拟微器械与软组织的交互操作进行仿真,通过给定持械臂的运动来记录软组织的受力,如图10所示。从结果中可以看出,在给定的运动中,所建立的虚拟肝脏组织物理模型能够获得较为平滑的反馈力,可实现虚拟手术仿真系统的力交互功能。
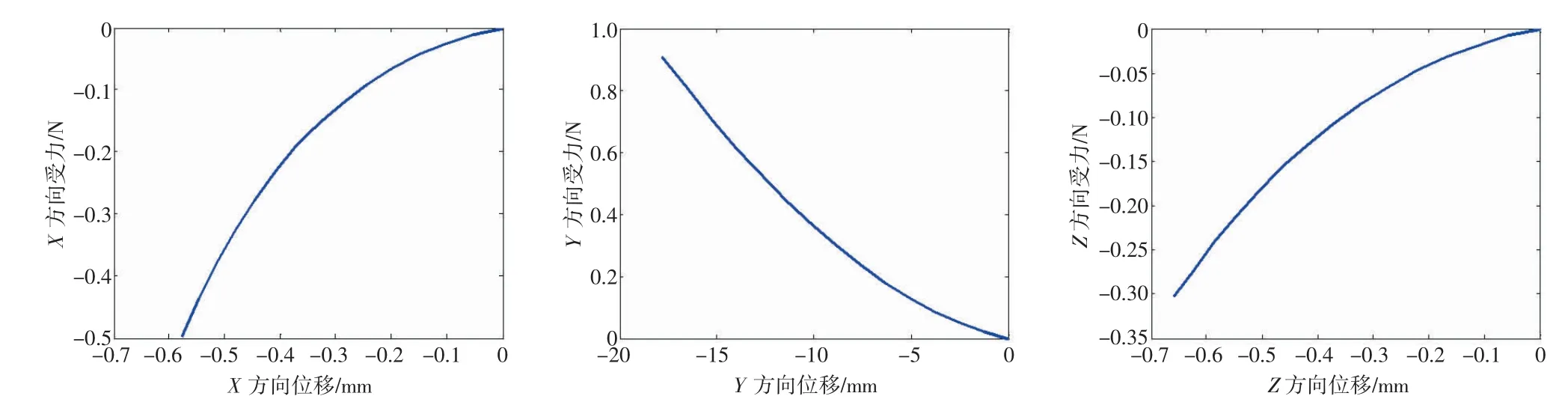
图10 给定持械臂运动时的肝脏组织X、Y、Z方向的受力-位移曲线
4 结语
本文利用OpenGL搭建了一套虚拟手术仿真系统,其中主要包括虚拟的主从运动模拟、肝脏组织与器械交互模拟2个部分。基于位置增量控制方法搭建持械臂主从映射的控制策略,并通过搭建虚拟手术仿真系统进行主从运动模拟;通过规则形状的肝脏组织样本有限元模型与离散单元组合模型获得的力学响应曲线对比获取其基本离散单元的弹簧和阻尼系数,并作为肝脏组织质点-弹簧物理模型的参数;在器械与肝脏组织交互操作中,输出其产生的交互力,并将该交互力反馈给Geomagic touch主手,实现在虚拟手术仿真系统中的力交互功能。在下一步研究中,我们将结合视觉和实际肝脏组织印压试验,对本文所提出的方法进行进一步的修正和实验验证,以提高虚拟手术仿真系统的力反馈模型精度。
猜你喜欢
中学生数理化(高中版.高考理化)(2021年9期)2021-11-05 08:14:12
制造技术与机床(2017年6期)2018-01-19 02:41:22
试题与研究·高考理综物理(2016年3期)2017-03-28 21:15:15
试题与研究·高考理综物理(2016年3期)2017-03-28 21:06:19
电测与仪表(2016年24期)2016-04-12 00:21:04
淮海医药(2015年1期)2016-01-12 04:33:11
探测与控制学报(2015年4期)2015-12-15 15:00:56
今日教育·幼教金刊(2015年10期)2015-11-28 01:27:19
意林(2015年20期)2015-10-21 11:21:08
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:55
