一种电子皮肤的触觉传感性能研究
2022-03-16 08:57曹鑫林王先进郭成东李鹭扬边义祥
压电与声光 2022年1期
曹鑫林,王先进,郭成东,李鹭扬,边义祥
(扬州大学 机械工程学院,江苏 扬州 225127)
0 引言
生物对外界信息的采集主要依靠皮肤,皮肤将受到的物理刺激的强度及位置传到大脑。随着机器人科技的发展,能够感知环境的刺激并做出合理反应是人们对机器人的新要求,这促使了电子皮肤的诞生[2]。目前电子皮肤主要在机器人、假肢及穿戴设备3个领域使用[3]。因此,设计制备电子皮肤柔性触觉传感器非常重要,它可以提高机器人的智能化水平,在机器人工作时,除能有效地避免障碍物外,还能对突然碰撞的物体做出合理的反应,而且环境感知能力能够帮助机器人在恶劣环境的情况下工作[4]。设计制备电子皮肤柔性触觉传感器有两种形式[5]:
1) 如人体皮肤一样放置在机器人上[6]。
2) 如数字手套一样穿戴在机器人上[7]。
作为电子皮肤感知外界刺激的触觉传感器应具有高灵敏度,能够感知皮肤上微小的刺激;高柔软性能适应机器人上不同的曲面,并能够承受拉伸、挤压、弯曲、扭转等变形[8];低成本,制备工艺应简单[9]。以聚偏二氟乙烯(PVDF)为材料的压电传感器能达到以上要求。近年来,由于PVDF材料具有优良的压电性及柔软性而备受关注[10-11]。与其他压电材料(如压电陶瓷)相比,PVDF材料更灵活、柔软[12]。因此,本文设计制备了以PVDF为材料的压电式电子皮肤柔性触觉传感器,以液体芯PVDF压电纤维表面的压电效应产生电荷为基础,实验分析了阵列的电子皮肤柔性传感器在不同力及不同位置的信号差异。最后通过机器学习来实现通过信号数据得知力的大小及坐标位置。
1 液体芯PVDF压电纤维的制备
将PVDF颗粒放在100 ℃的恒温装置上,完全干燥后放入拉丝装置中熔化。PVDF在170 ℃时达到熔融状态,因此,将恒温炉调到200 ℃使PVDF达到熔融状态[13]。再将PVDF和金属丝从模具底部挤出,在空气中冷却后形成金属芯PVDF压电纤维(见图1)。PVDF纤维在受到外力作用下,其表面的电荷密度会发生变化,因此,PVDF涂导电银浆后通过电极来收集电荷,然后以信号的形式进行反馈。

图1 金属芯PVDF压电纤维
将金属芯PVDF压电纤维进行极化处理。PVDF是半结晶高分子材料,具有α、β、γ、δ4种晶相,其中β相是有极性的[14]。极化装置可使PVDF纤维的β相方向与极化方向相同,这样能让PVDF的压电性更强。最后将金属丝抽出,注入超导电炭黑水溶剂。在PVDF纤维中间插入一根超细的金属丝作为一个电极,PVDF纤维表面的导电银浆作为另一个电极。这样便制备出了液体芯PVDF压电纤维(见图2),其横截面如图3所示。

图2 液体芯PVDF纤维
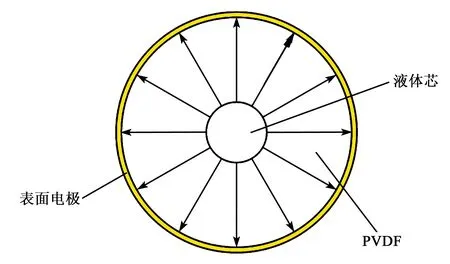
图3 液体芯PVDF纤维的横截面
2 神经网络状电子皮肤柔性触觉传感器的制备
将6根液体芯PVDF压电纤维以3×3的阵列放置在68 mm×68 mm的正方形模具中(制备的液体芯PVDF压电纤维为68 mm),液体芯PVDF压电纤维两两相距17 mm,且两两相互编织。由于液体芯PVDF压电纤维表面涂布的是全电极,当液体芯PVDF压电纤维表面两两接触后会造成其表面电极间的短路,为了克服短路而导致电子皮肤对于信号输出的影响,在两个液体芯PVDF压电纤维交汇处用绝缘薄膜隔开。这里的绝缘薄膜使用保鲜膜,因为保鲜膜具有透明、柔软、薄和绝缘的特点, 几乎不影响电子皮肤的性能。最后将编织后的液体芯PVDF压电纤维放在自制装置中并注入人体硅橡胶,制备的神经网络状电子皮肤柔性触觉传感器如图4所示。
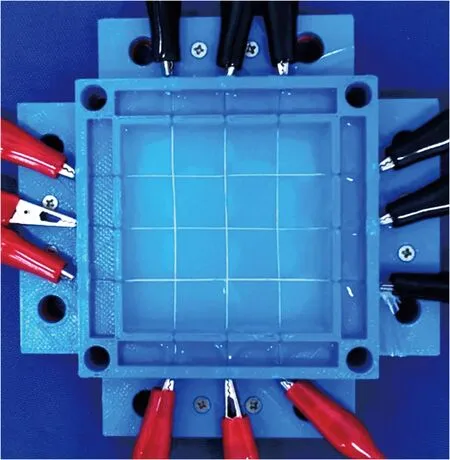
图4 阵列的电子皮肤柔性触觉传感器
3 电子皮肤柔性触觉传感器的传感原理
液体芯PVDF压电纤维受到推力计的压力时,由于压电效应,将在其表面产生电荷Q。液体芯PVDF压电纤维是圆柱形状,使用圆柱坐标系。液体芯PVDF纤维几何形状如图5所示。图中,Rm为内部半径,Rp为外部半径,L为液体芯PVDF纤维的长度,θ为标准圆柱坐标系的方位角。
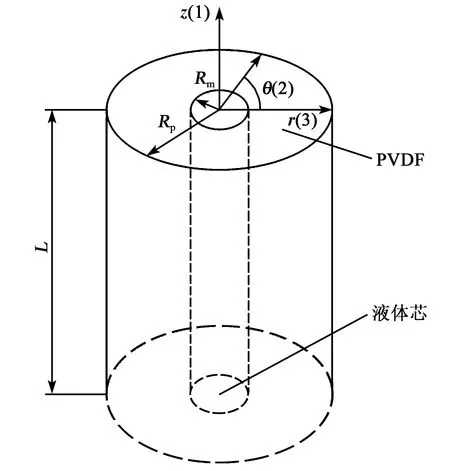
图5 液体芯PVDF压电纤维的圆柱坐标系和几何形状
压电方程具有4种类型,采用d型压电方程[15]。由于液体芯PVDF压电纤维的L≫2Rp,所以受到的周向应力、切应力可忽略。当液体芯PVDF压电纤维表面电极与中间液体芯电极导电,且受到外加电压时,应力条件和电场条件为
T33=T22=T32=T21=T31=0
(1)
E2=E1=0
(2)
式中:Tij为液体芯PVDF压电纤维所受应力;Ei为电场强度。此时压电方程为
(3)

由式(3)可知,当有应变时,液体芯PVDF压电纤维表面电极与内部液体芯电极产生电荷。但由于电荷过小,在电路中电荷易被消耗,用电荷放大器将Q转化成电压(V),并通过数据采集卡读取。
4 电子皮肤柔性触觉传感器实验
为了明确电子皮肤受到压力作用产生信号值的标准,使用以单根液体芯PVDF压电纤维制备成的电子皮肤柔性传感器,将推力计连接电脑端,采集推力计作用在电子皮肤上力的作用波形。电子皮肤表面受到压力后,纤维产生的电荷变化通过电荷放大器被数据采集卡采集,形成电压信号波形,与推力计作用在电子皮肤上的波形进行对比,如图6所示。通过对比图6(a)、(b)的波形发现,当电子皮肤受到压力后,电压信号也发生相应的变化,因此,选择以电压波形的幅值大小作为信号标准。
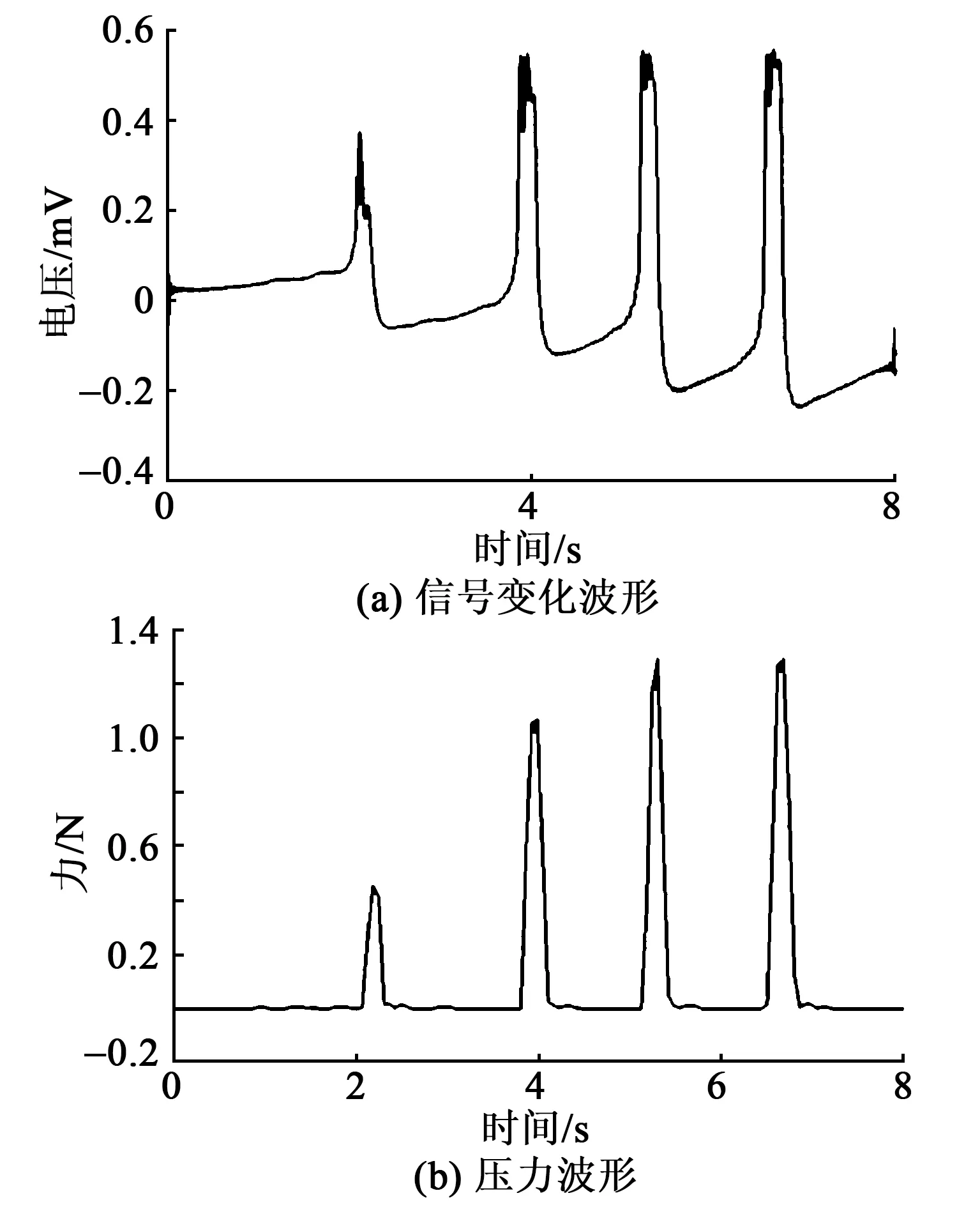
图6 纤维受到压力时信号波形、推力计施加压力波形
将电子皮肤固定在三维位移平台的上方,调动位移平台的x、y、z轴,以精确移动人工皮肤的柔性触觉传感器。接着划分坐标,将6根纤维以A、B、C、D、E、F为代号区分,如图7所示,共有49个坐标点。液体芯的钼丝、铜丝作为正、负极,连接到电荷放大器并接入数据采集卡,将信号传输至上位机,实验装置布置图如图8所示。推力计以若干确定坐标挤压刺激人工皮肤柔性触觉传感器(见图9),记录压力的大小、受力坐标。将电荷变化数据导入Origin滤波计算后得到幅值。

图7 皮肤柔性触觉传感器坐标划分

图8 实验装置布置图

图9 推力计垂直作用在电子皮肤上实验图
通过实验可知,在电子皮肤上施加相应的力,则6根液体芯PVDF压电纤维有对应的信号。将信号通过数据采集卡采集后,通过Origin建立坐标系形成图像,再采用非线性拟合得到拟合曲线及对应的数学方程。
图10为推力计给6根液体芯PVDF压电纤维正上方施加的力与信号关系。由图可知,随着力的增加,液体芯PVDF压电纤维的信号也随之增大。通过Origin将点拟合后得到拟合曲线的方程为
(4)
式中:C为压电纤维信号;F为施加压力;a1、a2、a3、p为拟合后方程参数。已知信号大小后通过式(4)可得出作用力的大小。
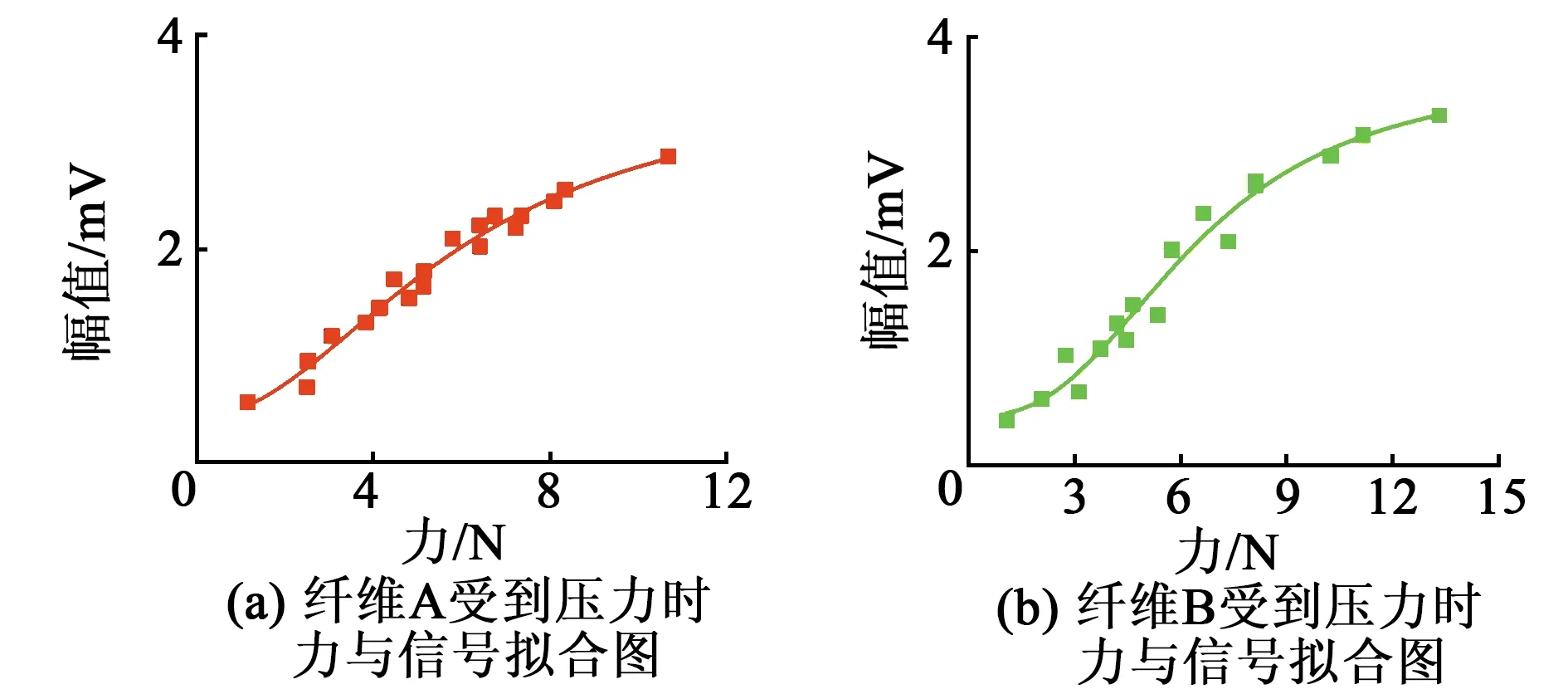
不同距离对电子皮肤中的液体芯PVDF压电纤维施加的力所产生的信号也不同,即可看作方程参数不同,如表1所示。

表1 拟合曲线的方程参数
通过式(4)可推理出力的作用点及坐标。首先挑选出4个信号最大的液体芯PVDF压电纤维以锁定坐标区域,当单根的液体芯PVDF压电纤维的信号比其他纤维大时,则可以推断出力的坐标在哪根纤维上,采用式(4)可计算出力的大小。当4根液体芯PVDF压电纤维的信号一致时,可判断出力作用在中间位置,将4个信号值代入式(4)后得出4个力的大小,并取4个力的平均数。当然这样计算不精确,且当液体芯PVDF压电纤维的数量增加到很大时,面积将增加到很大,坐标变复杂,对作用力的计算也会复杂。因此需要采用机器学习,用覆盖式的实验采集到的数据来进行机器学习,以达到方便且精确的力大小及坐标。
5 采用机器学习实现电子皮肤对力的采集
运用Matlab可以对数据使用函数进行分类及学习。Matlab可以浏览数据、选择功能、指定验证方案、培训模型和评估结果,可以执行自动培训以搜索最佳分类模型类型, 包括决策树、判别分析、支持向量机、逻辑回归、最近邻居和集合分类等[16]。Matlab的工具箱功能多样且强大,这里运用逆向传播(BP)神经网络算法及分类学习对数据进行处理。
5.1 运用BP神经网络算法
BP神经网络算法具有任意复杂的模式分类能力和优良的多维函数映射能力,解决了简单感知器不能解决的异或和其他问题。结构上BP神经网络具有输入层、隐藏层和输出层;本质上BP算法是以网络误差平方为目标函数,采用梯度下降法来计算目标函数的最小值[17]。
BP神经网络算法可以针对每一个液体芯PVDF压电纤维不同的信号数据,通过不断地训练、验证、测试,得到一个契合电子皮肤的神经网络,从而能够将6根液体芯PVDF压电纤维不同的信号输出成力的具体数值。
首先将信号与力的数据分别作为训练的输入值和目标值,然后分别将训练集、验证集、测试集设置为70%、15%、15%,接着将神经元数量设置为10,最后训练及查看训练结果图的误差分析图(Performance)及回归分析图(Regression),如图11所示。
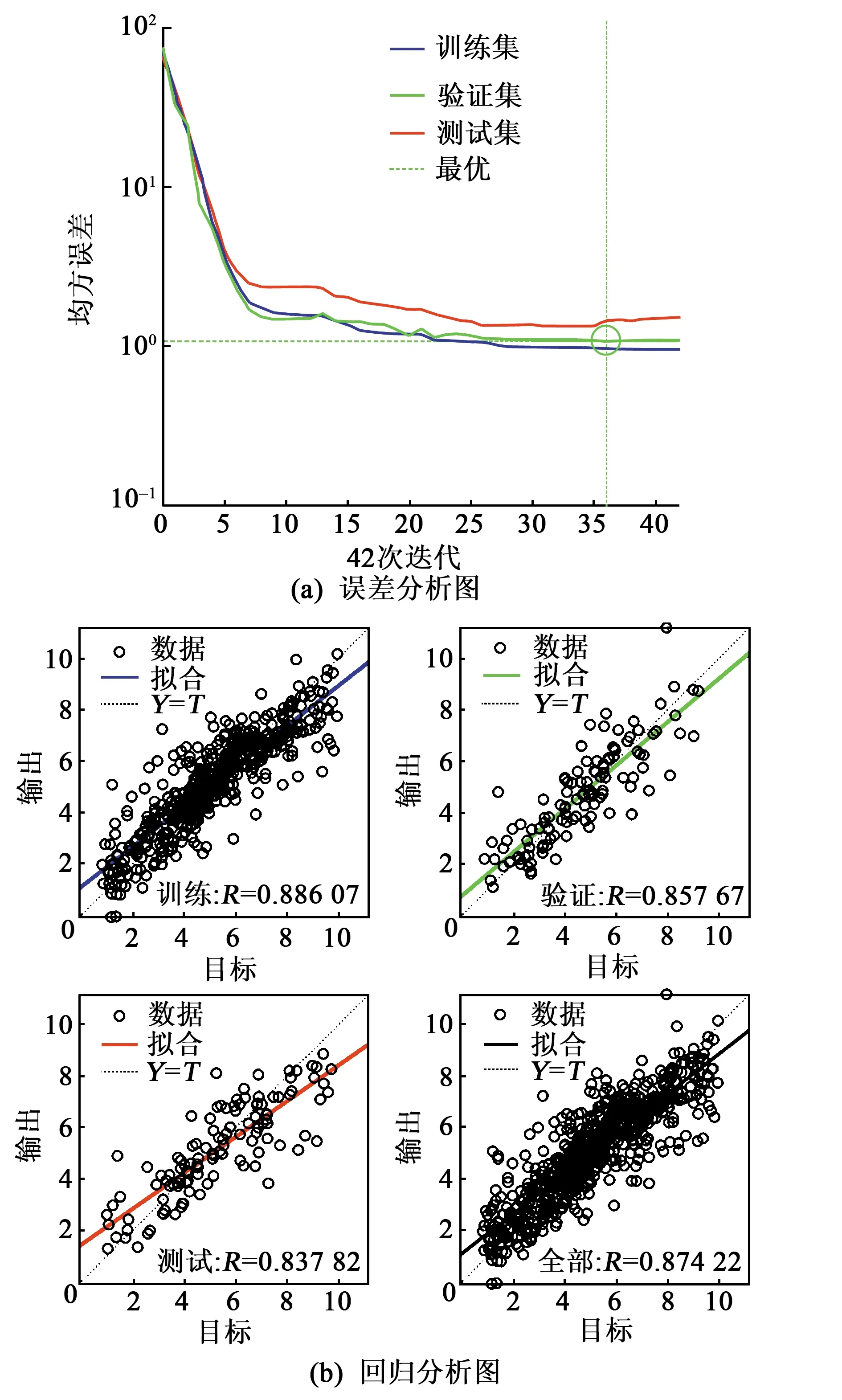
图11 BP神经网络算法训练结果图
由图11(a)可知,3条曲线分别为训练集、验证集、测试集,且当迭代次数达到36次时,迭代结束。由图11(b)可看出回归系数(R)为0.874 22,说明训练的结果很理想,所以训练的神经网络效果很好。
5.2 运用分类学习
Matlab工具箱里的分类学习(Classification Learner)可以将不同的液体芯PVDF压电纤维的信号进行分类,由于力的作用点不同,6根液体芯PVDF压电纤维的信号大小也不同,以此来对数据进行分类学习。通过不同信号的表现能输出具体的坐标,最终在BP神经网络算法及分类学习下将6根液体芯PVDF压电纤维的信号转化成力的大小及作用点。
首先将数据导入其中,然后设置预测值以及反馈值。由于每个算法对数据的处理不同,所以使用所有的算法进行计算后发现,中等高斯向量机(Medium Gaussian SVM)算法学习的程度最高(为94.2%)。因此,哪个学习程度较高,就采用哪个算法。最后查看分类学习结果的平行坐标图(Parallel Coordinates Plot)及接受者操作特征曲线图(ROC Curve)。
图12(a)为机器学习的平行坐标图。由图可知,同一属性的相同颜色相对集中,且属性上线条有颜色、有规律,这代表了本次实验的数据具有非常好的规律性,能够很好地进行分类学习。图12(b)为49个接受者操作特征曲线的其中一种,由图可知,曲线下面积(AUC)的取值是1,这说明检测方法的真实性很高,左上角直角程度代表了本次分类学习的结果很好。最后保存至工作区,等待后续验证及采用。

图12 分类学习结果图
5.3 机器学习结果分析
在Matalb的命令行窗口输入代码,首先将6个信号值以矩阵形式输入,然后用sim语句及trainedClassifier.predictFcn语句来读取力的大小及坐标。将预留的10组实际的力大小、坐标与机器学习后Matlab输出结果对比发现(见图13、14),实际力的大小与Matlab输出的数值有一定偏差,力作用点坐标的结果基本相同,表明利用机器学习对于本实验数据处理计算较精确。
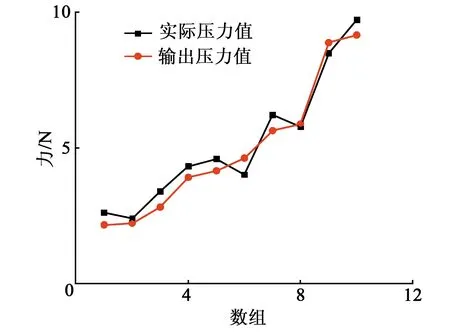
图13 测试压力结果与实际压力的比较

图14 测试坐标结果与实际坐标对比
6 结束语
本文介绍了液体芯PVDF压电纤维、电子皮肤柔性触觉传感器的材料及制备过程。其中单个压电纤维的传感原理是压电效应,纤维变形引起的电荷变化。传感实验的设计用推力计对电子皮肤柔性触觉传感器施加压力,通过电荷放大器将纤维的电荷转化为电压信号后再用数据采集卡进行采集。通过对比压力波形、纤维电荷变化波形,将电荷波形幅值标定为信号大小。推力计不断增加压力后,信号不断增大,采用Origin拟合曲线得到数学方程。在Matlab应用机器学习中的BP神经网络算法及分类学习对数据进行训练学习,其中图11(b)中R=0.87,分类学习中学习结果接受者操作特征曲线(ROC)下的面积为1,这表明机器学习结果优良。最后通过测试结果发现,阵列的电子皮肤柔性触觉传感器对于压力感应时压力大小偏差不大,作用点坐标仅个别有偏差。
猜你喜欢
东北大学学报(自然科学版)(2022年6期)2022-07-08
东北大学学报(社会科学版)(2022年1期)2022-02-17
海外星云(2021年6期)2021-10-14
北京航空航天大学学报(2021年7期)2021-08-13
航天返回与遥感(2021年1期)2021-03-16
中学生数理化(高中版.高考理化)(2020年10期)2020-10-27
红豆(2017年4期)2017-04-13
新高考·高一物理(2016年7期)2017-01-23
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
新高考·高一物理(2015年6期)2015-09-28