
术中导航系统在腔镜乳腺癌保乳根治术中的应用:病例报告
2022-03-16 01:48欧欣瑜陆艺文刘志瀚苏士成
岭南现代临床外科 2022年1期
欧欣瑜,陆艺文,刘志瀚,苏士成
乳腺癌的发病率逐年升高,目前已经成为全世界发病率最高的癌症[1]。2015 年中国新发乳腺癌30.4 万例,其中华南地区年龄标准化发病率高达33.6/10 万人[2]。随着筛查的普及,大部分乳腺癌在早期得到诊治,患者的生存时间大大延长;与此同时,中国乳腺癌呈现年轻化态势,年轻患者的生活质量成为关注的焦点[3]。相比于切乳手术,保乳手术能够在根治肿瘤的基础上保留乳房外形,极大地改善了患者的生活质量。更重要的是,有研究表明接受保乳手术和放疗的患者的生存期比切乳患者更长[4]。因此,保乳手术已经成为早期乳腺癌首选的手术方式。
随着乳腺癌手术技术的发展,外科医生对术后乳房外形美观度的要求逐步提高。开放手术遗留明显疤痕,还可能带来术后疼痛、上肢活动困难等并发症[5-7]。近年来腔镜技术应用于乳腺癌手术,腔镜手术不仅能够减小手术疤痕,还能降低疼痛等并发症的发生率、缩短患者住院时间,成为乳腺癌外科治疗的发展趋势[5]。然而,腔镜下保乳手术在临床的开展面临一个重要挑战——难以精确定位癌肿边缘。开放保乳手术中,术者用手指触及肿物边缘做环切,这在腔镜下难以实现。目前腔镜保乳手术中,多用亚甲蓝在肿物全周注射来标记边缘,但亚甲蓝容易在组织间隙弥散,造成手术视野不清,常常导致切缘阳性或正常组织被过度切除[8]。切缘阳性导致手术时间延长,甚至需要二次手术[9,10]。另外,切缘阳性患者的局部复发风险是切缘阴性患者的两倍[11,12]。因此,如何精确勾画癌肿边缘是腔镜保乳手术领域亟待解决的重要问题。
为此,我们开展了全球首例腔镜下术中导航乳腺癌保乳术,依据术前乳房MR 图像建立三维模型,术中用O 臂检测乳房位置,将二者拟合后,将癌肿的立体位置量化,再用探针精准勾画出癌肿边缘,即可在腔镜下沿探针位置将肿物完整而精确地切除。
1 研究对象与方法
1.1 患者信息
患者为46 岁中年女性,因“无意中扪及左乳肿物 10 天”于 2021⁃12⁃31 入院。患者 10 天前无意中触及左乳肿物,无伴疼痛、乳头异常分泌物、皮肤改变。查体:双乳对称,乳头同水平,未见偏移、凹陷或溢液,局部皮肤无红肿破溃及渗液,未见橘皮征及酒窝征。左乳外上象限可触及2 cm 肿物,质硬,无压痛,表面不光滑,边界欠清,可推动,未扪及血管搏动及波动感。余乳腺未扪及明显肿物。双侧腋窝及双侧锁骨上未触及明显肿大淋巴结。乳腺彩超提示左乳2 点(距乳头70 mm、距皮肤9 mm)低回声肿物,大小约23 mm×14 mm×17 mm,BI⁃RADS 4C 类。钼靶提示:左乳外上象限见结节影,约27 mm×19 mm,BI⁃RADS 4B 类。乳腺MR 示:左乳2 点见肿块影,大小约22 mm×19 mm×21 mm,考虑乳腺癌可能,BI⁃RADS 5 类,并左侧腋窝多发淋巴结转移可能。左乳肿物穿刺活检病理结果提示:浸润性癌。患者既往无乳腺肿瘤或卵巢癌病史,无乳腺癌或卵巢癌家族史。患者诊断为:左乳浸润性导管癌,cT2N1M0 IIB期。患者保乳意愿强烈并要求术后乳房外形美观,结合诊断我们为患者制定了腔镜下术中导航根治性保乳术及术后辅助放化疗的治疗方案。由于患者术前MR提示左侧腋窝多发淋巴结转移可能,与患者充分沟通后,患者要求术中植入输液港,已签订手术同意书。
1.2 腔镜下术中导航系统及手术流程
我们在手术中应用了Medtronic Stealth Station S7 手术导航系统。Medtronic Stealth Station S7 手术导航系统是一种术中导航系统,通过将术前影像与术中患者位置融合,构造虚拟三维模型。术前评估及手术流程如下:①术前MR:在手术前一晚,对患者进行乳腺MR 增强扫描,并把采集到的MR 图像信息导 入 Medtronic Stealth Station S7 手术导航系统,构建三维图像。②O 臂扫描:在患者全麻、消毒铺巾后,把参考架固定在患者胸骨柄上,对患者胸部进行O 臂扫描(图1A、B)。③图像融合:应用Medtronic Stealth Station S7 手术导航系统上的3D Fusion 功能,把O 臂扫描得到的实时图像与术前MR 融合,得到实时乳房三维图像。④前哨淋巴结活检。⑤探针勾画肿瘤边缘:探针通过腔镜孔(图1C),在导航系统指引下找到癌肿的位置,勾画肿物边缘(图2)。⑥用超声刀沿探针标记位置切下肿物,并取残腔边缘组织送病理检测(图3)。⑦因术中冰冻提示前哨淋巴结阳性,行腋窝淋巴结清扫,清洗、缝合伤口。⑧为患者植入输液港。
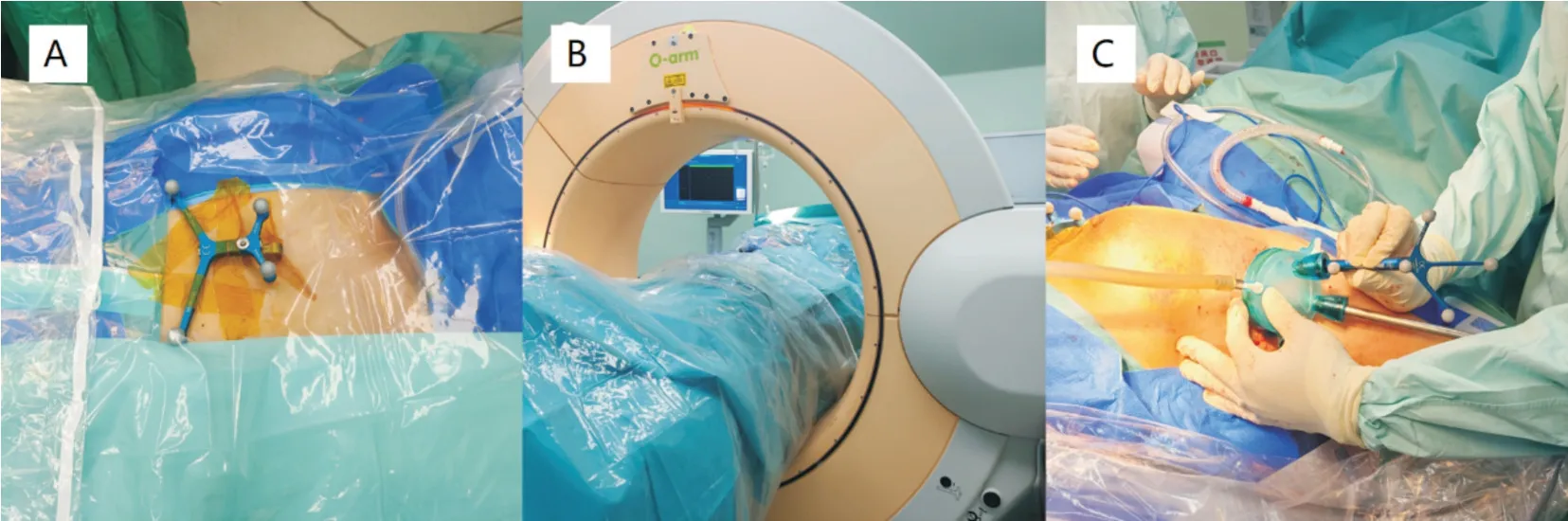
图1A~C A:参考架固定在胸骨上;B:O 臂扫描乳房;C:探针通过腋窝处腔镜孔
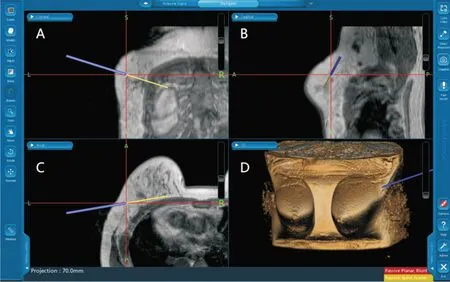
图2 导航系统显示癌肿及探针位置

图3 切除的乳腺肿物及组织
2 结果
术中共取肿物残腔边缘8 个,冰冻病理及术后石蜡病理均提示残腔边缘未见癌。术后双侧乳房外形基本对称,术口位于腋窝处,上肢下垂时正面无可视术口(图4)。患者对术后乳房外观表示满意。

图4 手术前后患者乳房外形对比图
3 讨论
我们开展了全球首例腔镜下术中导航乳腺癌保乳术,通过应用术前MR 图像建立高清晰度的三维图像,与术中O 臂实时乳房位置扫描结果融合,从而构建实时乳房三维模型。在此基础上,通过探针精准标记肿瘤边缘,引导腔镜下癌肿切除。术中导航技术的应用使得癌肿边缘被精确定位,大大提高了腔镜保乳手术的可操作性和切缘一次阴性率。
术中导航技术通过将影像学结果与实体拟合,使得病灶被精确定位,显著提高了手术的准确性和安全性,目前广泛应用于神经外科和脊柱外科[13-17]。Gauvin 等人在开放保乳手术中应用NaviKnife 探针导航,通过术前和术中超声构建三维模型,用定位针判断癌肿位置后行切除,显著降低了切缘阳性率,可见导航系统在保乳手术中有重要的应用前景[18]。但是,彩超结果只能提供二维平面,并且超声的精度远不及MR,可能遗漏肿瘤边缘的小病灶。我们首次将基于MR 图像的术中导航系统应用于腔镜下保乳手术,依据MR 高精度的图像定位肿瘤,从而用探针精准勾画癌肿切缘。
研究发现O 臂在3D 扫描采集模式下的辐射剂量远小于常规CT[24]。这也在多项研究中得到验证[24-26]。因此,患者无需为腔镜下术中导航乳腺癌保乳术的扫描辐射剂量担心。
O臂扫描和导航系统图像融合共耗时20分钟。重要的是,由于肿瘤边缘被清晰勾画,腔镜下保乳手术时间整体被缩短。由于该病例是接受腔镜下术中导航乳腺癌保乳术的第一例,目前评估和操作过程还存在一些问题。在该例手术中,由于术前MR 扫描与术中O 臂时乳房的位置形态不完全一致,导致融合图像存在少量误差,未来我们会探索更高质量的治疗流程。
总之,腔镜下术中导航乳腺癌保乳术通过准确勾画癌肿边缘,大大提高了腔镜保乳手术的可操作性和切缘一次阴性率,有望激发出更多新的腔镜手术技术,促进腔镜保乳手术的推广。
猜你喜欢
中国药学药品知识仓库(2022年8期)2022-05-09
现代仪器与医疗(2021年1期)2021-06-09
医学食疗与健康(2021年27期)2021-05-13
幸福家庭(2021年1期)2021-03-08
当代化工(2020年2期)2020-03-18
中国保健营养(2019年6期)2019-10-21
中国美容医学(2019年8期)2019-08-23
科技视界(2019年12期)2019-06-20
中国实用医药(2017年26期)2017-11-07
卷宗(2014年7期)2014-08-27
