多用途扇翼机设计与实现
2022-03-15 09:42李泰兴钟小华陈俊华林庆贤梁雅婷
中国新技术新产品 2022年1期
李泰兴 钟小华 陈俊华 林庆贤 梁雅婷
(广东白云学院,广东 广州 510450)
0 引言
由于无人机具有制造成本低、使用成本低、安全风险系数小、运动灵活以及便于操控等优点,因此在实际生活中得到了广泛应用,但无人机也存在一些缺陷,例如当前无人机的类型比较少,主要包括多旋翼、固定翼和直升机。多旋翼垂直起降空间小,但其载重量小且续航时间短,无法运输较大的物资。固定翼虽然在承载能力以及续航时间方面比多旋翼强,但是其起飞需要较大的空间且操控要求更高,大迎角易失速,从而无法在地势崎岖的山区作业,而直升机的操作系统较为复杂,危险系数较高。扇翼机是一种在机翼上表面安装横流风扇的新型飞行器,与传统飞行器不同,其是通过风扇旋转产生升力和推力,推动飞行器进行飞行。独特的飞行原理使其具有超短距起降、大迎角不失速、操纵控制简单、低速飞行稳定性和安全性好等优点。
1 扇翼机总体设计
1.1 结构设计
该扇翼机由扇翼和V型尾翼-固定翼机身组成,还搭载了一套纯电动力系统和飞行控制系统。翼梁分为单梁式、多(双)梁式以及多腹板式。由于机翼既承受分布力,又承受集中力,因此单梁式的传力路径更短。集中受力点可以直接设计在翼梁上,无须通过翼肋传递。由于翼肋仅须承受气动分布载荷,强度很弱,不能利用翼肋传递集中力,因此其外段机翼内部主梁采用航空层板制作的腹板式主梁,加强肋采用椴木层板,普通翼肋采用巴尔沙木,外部由0.5 mm的巴尔沙木覆盖并用复合纤维进行强化;中段安装的横流风扇采用多条碳纤维腹板梁结构,机翼内部用碳纤维管进行结构强化,以增大机翼的承载能力。横流风扇分为左、右2段,其扇翼叶片由泡沫及玻璃纤维通过热切割和真空袋工艺制成。
因为尾组受力不大,所以展弦比不是非常重要,但应该比主翼小。V型尾翼翼型采用NACA 0006,弦长为130 mm,单片长180 mm的轻木骨架结构尾翼,2片尾翼夹角为60°。舵面采用平面型铰链与尾翼连接;尾翼整体用3D打印连接件连接在机身尾管上。采用V型尾翼不仅可以减小尾部质量,而且还可以降低干扰阻力。
机身整体以轻木结构为骨架,采用多模块设计,包括吊舱、云台以及尾翼。多模块的设计使该扇翼机的场地动员能力更强,具有更高的市场竞争力。
该扇翼机搭载了2个朗宇X2212 kv980外转子无刷电机,将2个好盈电子调速器和1块锂离子电池作为扇翼动力系统;舵面的控制采用4颗银燕ES08MA 12g高灵敏度微型舵机对其进行控制。飞行控制系统为CUAV V5飞控。设计基本参数如下:翼展为1 200 mm,机长为970 mm,展弦比为4,横流风扇长度为590 mm,横流风扇外径为90 mm。
传统固定翼、多旋翼都安装了各种尺寸的螺旋桨,而扇翼机则没有安装螺旋桨,其横流风扇也是安装在机翼中央,在安全性方面比前者要高许多。当发生突发事件时,扇翼机能降低发生人员受伤事件的概率;同时,还可以降低能源损耗以及减少人力成本,在一定程度上可以降低运营成本。在维护方面,运营者可以更方便地开展维护以及日常检查工作。该扇翼机三维建模图如图1所示。
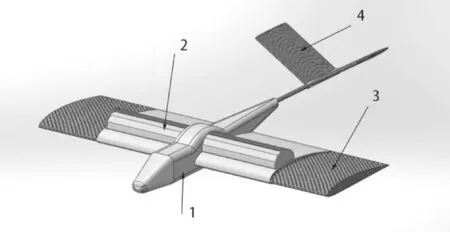
图1 多用途扇翼机
1.2 扇翼结构设计
因为该扇翼部分的阻力较大,所以采用分段设计的平直翼,中段为横流风扇,外段为普通机翼。该文在Profili翼型库里选择了5种翼型作为对比。由于内段需要安装横流风扇,因此选用厚度较大的翼型。因为外段作为额外的升力来源与副翼安装段,所以采用升阻比较大的翼型。该扇翼机在飞行高度为100 m、速度为10 m/s且翼弦为300 mm时的雷诺数如公式(1)所示。

式中:为空气密度;为气流速度;为气流流过物体的距离;为(动力)黏度。
根据公式(1)计算可得=203 771。
通过Profili分析得到5种翼型升阻比与迎角的关系图,如图2所示。

图2 各翼型升阻比与迎角的关系
对5种翼型进行比较,最后决定选用CLARK Y作为扇翼机外段机翼的翼型,当雷诺数=203 771、迎角=4°时,该翼型的升阻比最大。因为内段需要厚大的翼型,所以选用GOE 384为内段机翼的翼型,该翼型的最大升阻比虽然与CLARK YM-18相差不大,但是后者升阻比陡然上升,说明在空中有微小的姿态变化,会出现上下颠簸、波状飞行甚至失速的问题。
横流风扇是该扇翼飞行器最大的特点,也是该扇翼机向前的推进力及其部分升力的来源。扇翼飞行器是在固定翼飞机上加装横流风扇,根据主动环量飞行原理,利用横流风扇加速机翼上、下表面形成气流速差,实现超短距起降甚至垂直起降的目标。传统扇翼机机翼没有翼型,阻力较大,当来流达到=40 m/s时,来流使扇翼升力急剧下降。该项目通过1个厚度较大的翼型减小了中段扇翼所受到的水平方向的阻力。风扇外径为90 mm,叶片安装角为50°,叶片个数为13个。采用多层轻木隔板,保证横流风扇旋转时的强度。扇翼两侧为碳纤维板,可以保证横流风扇的同心度。
1.3 扇翼机气动仿真
在Solidworks Flow Simulation中对扇翼机建模进行气动分析,其设定条件如下:温度为298.2 K,仿真环境气体为空气,空速为10 m/s,横流风扇转速为30 r/s。在仰角为5°的情况下,对其升力、表面压力以及阻力进行分析。
经过仿真计算得到的结果如下:全机能产生17.100 N的升力,受到3.368 N的阻力,可以满足最初设计的要求。其机翼上表面压力分布云图如图3所示。
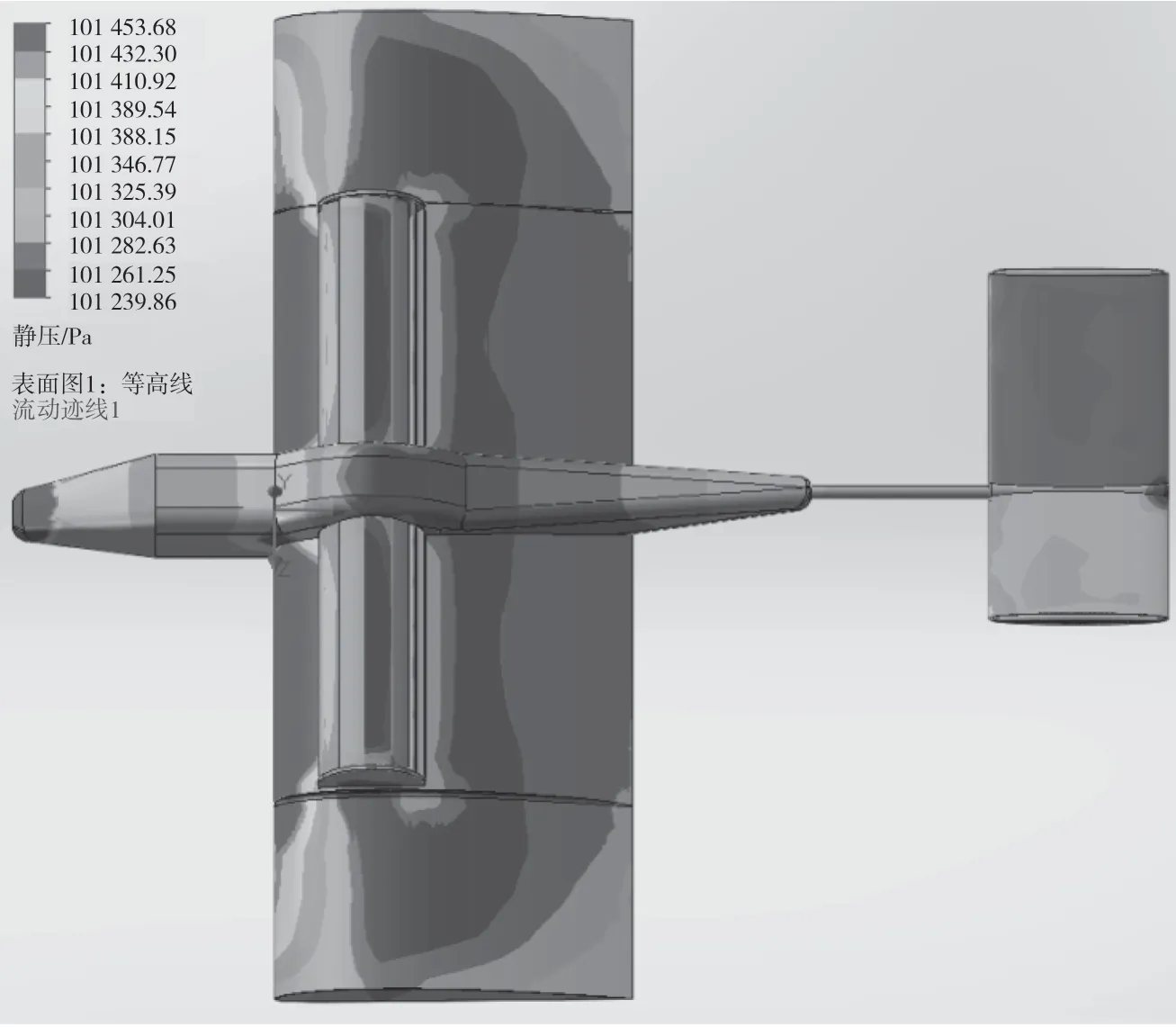
图3 扇翼机飞行表面压力分布云图及扇翼机中部速度分布切面图
2 扇翼机飞行控制系统
该扇翼机采用基于STM32F765的开源可编程飞控,通过RTK GPS差分定位模块(集成了RTKGPS+GNSS系统双定位模块)、陀螺仪、电子罗盘、气压计、差分空速管以及pix光流传感器等传感器,以PPM信号控制微型伺服器,通过高效的控制算法内核能够精准地感应并计算飞行器的飞行姿态等数据,实现自我调整、修正扇翼机姿态的目标。同时,还可以配合MissionPlanner For Radiolink地面工作站对其航向进行规划,按计划进行巡航飞行,再对数据进行实时分析。
控制流程如图4所示。整个控制系统的功能如下:1)读取飞行器的姿态信息。2) 处理传感器提供的姿态信息并进行数据融合滤波,从而得到准确的姿态角估计值。3) 与MissionPlanner For Radiolink地面工作站通信,从而实现超视距全自主飞行的目标。4) 通过地面控制终端可以提前设定飞行航线、高度及速度等参数,一键即可实现在起飞、航线飞行和返航降落等过程中的全自主飞行功能,还可以实现半自主飞行、全手动飞行、智能失控保护以及自动返航降落等功能,降低了扇翼机操控人员的工作难度,提高了数据采集率。5) 地面站系统拥有3D地图、可视化飞行仪表,可以提供飞机姿态、坐标、速度以及角度等实时飞行数据,也可以提供飞机及飞控系统状态的信息。6) 按照飞行规划执行控制策略并输出控制信息。
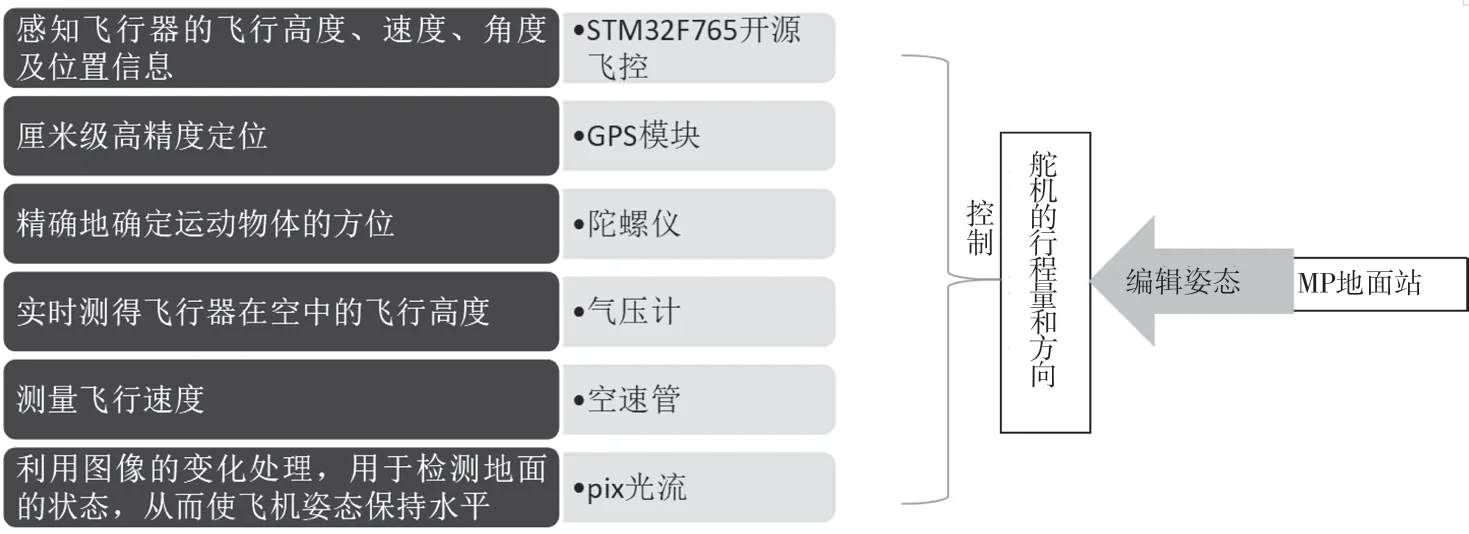
图4 飞控控制流程
控制系统的质量守恒方程如公式(2)所示。

式中:为速度在轴上的分量;为速度在轴上的分量;为密度。
在方向上的动量守恒方程如公式(3)所示,在方向上的动量守恒方程如公式(4)所示。
式中:F、F为微元体外部压力(在不考虑气体重力及其他外力作用时其值为0);为黏性系数。
能量守恒方程如公式(5)所示。

式中:为热力学温度;c为比热容;为热传导系数;S为黏性耗散项。
因为该扇翼机是一种低速飞行器,气流作用于操纵舵面的气动力较小,舵面效率也比较低,所以采用常规的气动布局,即副翼控制扇翼机横滚、机身后V型尾翼控制扇翼机的俯仰和偏航。由于扇翼无人机的横滚风扇转速与升力存在耦合关系,因此对飞行控制系统来说,要在传统固定翼的基础上添加直升机的解耦算法对其滚筒进行控制,即通过校正输出、输入之间的关系,减弱甚至消除这种相互关联程度,从而使其变成具有多个单输入、单输出系统的算法。而在已有的仿真中可以看到,在解耦后,方位角和横滚角可以同时运动,俯仰角没有耦合角运动。
3 多用途的实现
为了应对各种不同的用途,该扇翼机搭载了5.8 GHz、2 000 mW的无线图像传输器,并配备了1个低延时、宽动态且具有超广角的1200TVL超清摄像头及机载云台。地面上安装了1个自动天线跟踪云台和1个20DBI平板天线接收图传信息,使该无人机能轻松地开展超视距作业。
通过不同云台、吊舱、图传以及飞控的配合可以实现在10 km内(不同情况下)开展作业的目标,相关情况如下:1) 短距离物资快速运输。通过飞控和GPS定位,可在小范围内起飞并将物资快速运往需求地。2) 地形测绘。通过飞控规划路线,高清摄像头采集图像实时回传到地面端,在电脑上呈现三维模型。3) 农药喷洒。吊舱可吊起容积约1.1 L的农药,并将喷洒泵接至飞控端,根据区域地形规划好的路线开展作业。4) 应急方面。通过更换喊话器、探照灯、热成像摄像头以及激光雷达等设备对地面的疏散、探照以及风险进行排查。
4 结语
该文设计的超短距起降、大迎角不失速且能载重飞行的多用途扇翼机是一款由扇翼和固定翼机身组成的带有飞行控制系统及图像传输系统的新型飞行器。该扇翼机用扇翼代替螺旋桨提供升力,在突发事件时可有效减少人员被螺旋桨打伤的概率,极大地提高了安全性,从而使该文设计的多用途扇翼机在未来市场中具有更大的潜力。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
煤气与热力(2021年3期)2021-06-09
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年7期)2019-04-25
电子测试(2018年23期)2018-12-29
北京航空航天大学学报(2017年5期)2017-11-23
中国公共安全(2017年7期)2017-10-13
计算机测量与控制(2017年6期)2017-07-01
航空模型(2016年10期)2017-05-09
舰船科学技术(2016年1期)2016-02-27