关于空中交通管制安全间隔问题探析
2022-03-10 03:52:04尚佳瑶
大科技 2022年8期
尚佳瑶
(中国民用航空西北地区空中交通管理局,陕西 西安 710082)
0 引言
当前国内经济水平不断提升,先进科技日益成熟,交通领域也得到了飞速发展,使人们出行更加便捷。但是,凡事都具有两面性,在提高出行效率的同时,一些交通安全问题也由此产生。为了满足人们出行需求,航空运输量逐渐提升,导致空中交通航线拥挤,部分航班频繁延误,管制人员工作压力增加。对此,管制人员应加强对航班纵向、侧向、垂直三个方向的安全间隔管理,将飞机小于安全间隔的风险降到最低,有效改善空中交通现状,促进国内交通事业良性发展。
1 空中交通管制下安全间隔概述
在现行的空中交通系统中,应注重飞机间的最小间隔,以飞机为中心的保护区作为衡量标准。为了始终保持最小保护区间,管制人员常常要求飞机在空中盘旋等待或者在地面等待延迟起飞,从而预防航空器之间在空中突破最小安全间隔冲突,维持有序的空中交通流量。在交通管制工作中,多采用两种管制手段来实现安全间隔:①程序管制,由管制人员根据飞行员报告、推测领航等方式,明确航空器的瞬时位置,探寻对其他航空器间的相对位置,确保间隔安全,避免航空器之间发生冲突。②雷达管制,依靠雷达监视器进行飞机位置动态跟踪,掌握飞行高度、速度等信息,提前预测冲突,提供科学可靠的管制服务。关于安全间隔标准,是指航空器在时空距离上满足要求的最低安全水平,一般可分成纵向、侧向和垂直3 种类型,具体如下。
(1)纵向间隔。不但属于时间间隔,也属于空间间隔。适用于飞行阶段占用同一高度层且轨迹相同的飞机。在程序管制手段应用中,该项间隔多采用时间间隔,如规定飞机经过导航台的ETA 等。在雷达管制应用中,多用于距离间隔。
(2)侧向间隔。属于距离间隔的一种,可确保相同高度层中航空器之间保持充足的侧向距离。因程序管制难以准确定位飞机连续位置,故而采用雷达管制进行监测。该项间隔的应用可使多架飞机在相同高度层上飞行,提高繁忙区域空中资源的利用率。
(3)垂直间隔。属于距离间隔的一种,多通过飞机间的垂直高度差来保障飞机安全。与前两种相比,此种间隔最为行之有效,且安全性更高,在程序与雷达两种管制中均得到灵活运用[1]。
2 空中交通管制下安全间隔的分析
2.1 纵向间隔
2.1.1 影响因素
在航空器运行中,对纵向位置产生影响的主要因素包括飞行速度误差、导航设备测量误差、飞行员操纵误差等,分别受空中风、DME 测距机操作、飞行员操作失误等因素引发。从静态层面分析,飞机在空中位置的分析应放眼于机载导航设备性能,通过探究该设备的定位原理、精准度等,寻找飞机空中定位中遵从的数学模型与误差情况,由此得到航空器间的纵向距离。从动态层面分析时,应立足于飞行速度偏差。因机载导航设备只能代表某个固定时间点时飞机位置,一旦时间改变,飞机位置读数便会发生变化,误差也随之改变。但是,若以飞行速度为核心进行研究,因时间、速度与距离间关系密切,便可对飞机在空中任何位置进行确定,还可得出飞机位置与时间连续间的关联,对飞机空中位置与相对纵向距离进行深入探究。
2.1.2 速度分布情况
本文研究的飞机速度是指地速,即飞机在飞机状态下相对于地面的速度。因飞机空速受大气移动速度的影响,与地速间的关系可用公式表示如式(1)所示。

式中:W——地速;K——空速;F——风速。
因当前飞机上普遍设置了测速装备,地面也安装了雷达管制设备,驾驶员和管制者均可较为精准的获取地速数据,可使安全间隔得到一定保障。在飞行期间,对飞机地速产生不良影响的因素包括3 种,即风速变化、动力装置油门变化、飞机偏航。在空中风速影响下,假设航空器受到的顺风与逆风频率一致,符合实际情况,则航空器的位置便是服从正态分布的随机变量。在动力装置方面,因耗油量与油门大小具有正比关系,当油门超过最优设计时会低于最优设置情况。驾驶员因对油门设计较为敏感,一般会最大限度的调节油门来节约油量消耗。值得强调的是,当发动机设定值固定时,只要飞机出现偏航情况,便会降低地速。可见,飞机在航路上飞行时,地速均值与标准巡航地速相比要低[2]。
2.1.3 基本模型构建
航空器在运行期间,纵向间隔通常是对飞机飞过相同区域时间规定不同时刻而得出,如图1 所示。

图1 纵向间隔
管制工作者应保证飞机1 和2 在经过航路中相同点的时间差为t。令前面飞机为1 号,后面为2 号,在经过某个导航台时1号领先于2 号,二者间经过该点时的时间差为t,以2 号经过该点的时刻为0 进行计时,用S1表示1 号的地速,S2表示2 号地速,Z1和Z2分别为1 号和2 号经过导航台的距离,则存在以下情况。
当t=0 时,Z1=S1t,Z2=0;
当t>0 时,Z1=S1(t+t1),Z1=S2t;
二者间的纵向距离的计算模型如式(2)所示。

式中:W——随机变量,由1 号和2 号地速情况来决定。
2.2 侧向间隔
在航空器运行中,主要受天气情况、机载导航设备误差、驾驶员误操作等因素影响,三者中天气情况多为空中风向与风力,但因导航设备的应用与自动驾驶技术的提升,该项因素的影响力逐渐降低。在本文研究中,重点探究飞机对空中侧向位置误差的影响,针对VOR 导航系统深入探究飞机的侧向偏航问题。
2.2.1 VOR 导航系统
该系统属于相位式高频导航系统,由地面电台朝着飞机传达位置信息,便于飞机可准确定位地面电台的位置。技术原理是由地面VOR 地面站朝着空中发射两个30Hz 的低频信号,全向信标台采用两副天线,同时发射两个经过调制后的甚高频信号,一个是从30Hz 信号调整到9960Hz 频率上,另一个是由30Hz 信号调幅到甚高频后,再由方向性天线发射可变信号。在天线辐射场中,不同方位正向最高值并非是相同时刻产生,而是跟随方位角变化而改变。根据图2 可知,两种信号在0°、90°、180°和270°磁方位中,相位差分别为0°、90°、180°和270°。可见,基准与可变信号间的相位差角代表的是电台磁方位角,当航空器收到上述低频信号后,将两个相位相减便可获得飞机与地面VOR 台相对应的方位角[3]。

图2 基准与可变信号间的相位差关系
2.2.2 飞机偏航问题
根据VOR 导航原理可知,因定位方法为测角度,偏离预期航迹的距离受飞机和VOR 地面站的距离影响,二者间的联系可用公式表示如式(3)。

式中:Xc——飞机偏离航迹的距离;p——飞机与VOR 地面站的距离;φp——飞行误差;a——信号发射角误差;a1——信号接收角误差。
因上述角度误差值均较小,取值为随机分布。对Xc分布情况的探究十分关键,进而影响侧向安全间隔的设定,可从两方面着手进行分析:①通过分析a、a1与φp的分布情况,利用恰当方式将其结合起来,进而获得Xc的分布。②直接对飞机偏离航线的距离进行测量,探寻与VOR 台间距离的统计规律。该法适用于基层对象,可降低工作量与资金投入。前者是用多个角度的均方差代表偏航距离方差,后者是将偏航距离均值与方差当作飞机与VOR 台间的距离函数。但因研究对象较多,不如前者简单明了,因此多采用后者进行飞机侧向安全间隔设计。
2.3 垂直间隔
2.3.1 影响因素
按照国际民航组织规定,在空中交通管制期间,垂直间隔定义为两个航空器在垂直平面中,在相同基准线间的距离。为使两架飞机不会小于安全间隔,飞行距离适中大于冲突发生值,应对飞机垂直方向的影响来源进行分析,即天气因素、机载测高设备误差、驾驶员误操作。当前,天气因素引发的误差多因空中风对飞机高度产生的影响,包括晴空颠簸、上下气流碰撞等,不但会影响飞行活动,甚至会引发交通事故,但此类影响可通过系统补偿,总体可控;人为因素的发生概率较小,因此本文重点对机载测高设备产生的误差着手,对飞机垂直间隔的设置误差进行探究[4]。
2.3.2 飞机高度表误差分析
当前民航客机大部分都安装了测高仪器,但因无线电高度计在测量方式上存在不足,飞机并非平稳飞行,难以展现真实高度值。对此,大部分飞机依然凭借高度计度数判断飞行高度。此种高度计可将气压值转变为相应高度进行刻画,高度与大气压下降幅度成反比,与指针指示高度成正比,这便是该设备的运行原理。由此可知该设备误差体现在两个方面,即机械型和方法型。假设两架飞机均为波音737-300 型客机,高度方差均为50,由0m 提高到900m,计算结果如图3 所示。当二者间高度差为0m时,在垂直方向出现接触的概率最高为1.123×10-3;当高度差为900m 时,概率最低为1.2535×10-36。可见,二者在垂直方向出现接触的概率与高度差间为反比关系。
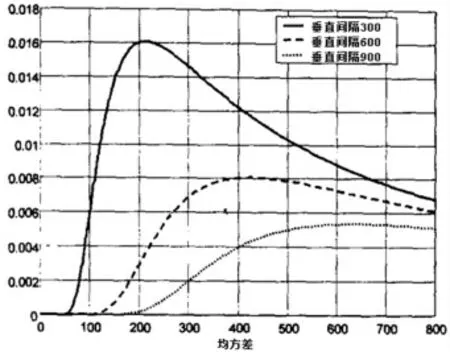
图3 高度均方差对飞机接触概率的影响
3 飞机间冲突的仿真分析
3.1 概率模型创建
根据上文分析可知,飞机间冲突概率是飞机中3 个方向冲突概率的乘积,在不同位置关系下出现冲突的概率模型不尽相同,应结合实际情况进行计算,侧向、垂直和纵向的冲突概率模型如下。
(1)侧向间隔。当处于平衡航路状态下,飞机间冲突概率可表示为式(4)。

式中:d——平行航路间的距离;x——飞机偏航均值与距离增长率;Pc——飞机与导航台间的距离。
当处于交叉航路状态下,飞机间冲突概率可表示为式(5)。

式中:r——交叉航路交角;d——平行航路间的距离;x——飞机偏航均值与距离增长率;Pc——飞机与导航台间的距离。
(2)纵向间隔。这一间隔下的概率模型可表示为式(6)。

式中:t——后机经过导航台开始计时后的时间项;t1——前机领先后机的时间间隔;S1——标准巡航速度;dz——均方差。
(3)垂直间隔。该间隔下的概率模型如式(7)。

式中:da——两架飞机各自飞行高度层间的差值;A——时间前者飞行高度;A2——后机飞行高度。
3.2 仿真程序
在模型创建后,采用计算机进行仿真分析,利用Matlab 软件将数学模型转化为适应于计算机处理的形式,然后给出该模型所需的基础数据,使计算机结合程序内给定的算法,计算出该模型处理后应得的结果,对现实事件发生情况进行模拟。在飞机安全间隔问题探究中,先要面向飞机纵向、侧向和垂直3 个方向中,飞机的导航设备、飞行时间、航路结构以及不同飞机可能出现的冲突概率进行分析,再归结成总体冲突概率,依靠统计学方式探究飞机间发生危险的成因与状况。在仿真期间,所用航路结构信息根据国内民航局的相关规定设计,机型选用B737-300 型飞机,性能相关数据源于Boeing 企业的飞行手册。对于3 个不同方向的模块函数而言,主要作用均是对该方向中两架航空器间冲突概率的分析,其流程如下4 个方面:①从主函数中采集计算数据。②对数据单位进行统一,与国际单位相同。③调用计算均值和均方差的子函数,采用计算积分上下限的子函数。④将上述子函数结果再次计算,并应用到航路结构、飞行动作与方式上,使数据得到良好处理。通过方向模块函数的计算,可获得不同时间、方位上飞机发生冲突的概率,将其反馈给主函数,再根据时间的差异计算总冲突发生率,利用图形处理函数绘图,将本次仿真的最终结果展现出来。
3.3 算例分析
假设相同航路、相同方向上有两架飞机航行,二者的侧向距离为0,型号均为B737-300 客机,机翼展开为28.9m,机身长度为35.2m,高度为12.3m,标准巡航速度为每小时795km。将机载高度表均方差设定为30,地速均方差设定为70,假设1 号飞机领先于2 号飞机,当1 号飞机经过导航点后,2 号飞机开始计时,3mn 后1 号飞机开始下降,初始高度为5200m,下降率为每秒10s,目标高度层为3500m;2 号初始高度为2500m,爬升率为每秒8m,目标高度层为4300m。在2 号飞机开始计时后,观察0.5h内飞机在纵向、侧向与垂直方向发生冲突的概率,与二者的总冲突概率,共计计算两次,第一次得到飞机之间接触概率;第二次得出二者出现危险接近的概率。两次的计算结果如表1 所示。
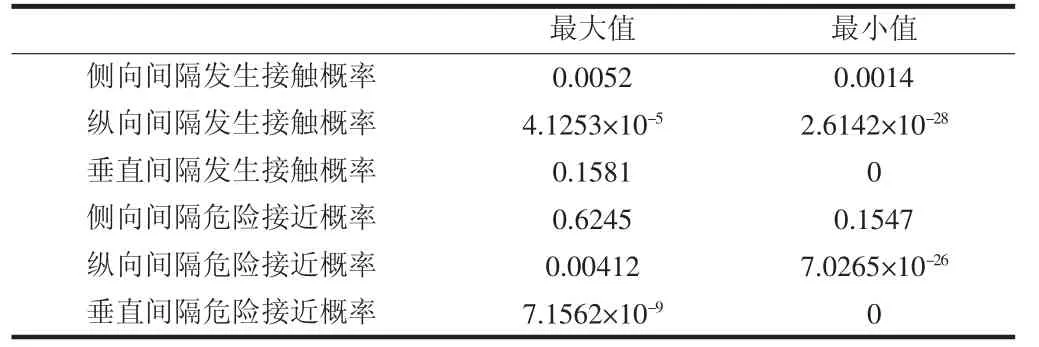
表1 飞机间冲突发生率与危险接近率结果
4 结语
综上所述,在飞机飞行期间,如若安全间隔没有得到良好管制,很容易发生小于安全间隔的情况,造成不可挽回的后果。对此,应创建飞机飞行冲突概率模型,从纵向、侧向和垂直3 个方面着手,探究不同位置的影响因素与程度,从而获得飞机间距离随机变量函数,再确定冲突发生时距离上下限积分后,便可准确获得飞机间不同程度冲突的概率值。对此,交通管制人员应不断改进管理技术,创建新的安全预警系统,并与发达国家交流吸取经验,准确计算出飞机间冲突发生率与危险接近率,促进国内交通事业的可持续发展。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
能源(2017年9期)2017-10-18 00:48:41
西南石油大学学报(社会科学版)(2016年1期)2016-12-01 05:21:32
光学精密工程(2016年3期)2016-11-07 09:03:52
太空探索(2016年3期)2016-07-12 09:58:45
太空探索(2016年8期)2016-07-10 09:21:58
工业设计(2016年6期)2016-04-17 06:42:51
通信电源技术(2016年1期)2016-04-16 04:57:35
西北工业大学学报(2015年1期)2016-01-19 03:29:56
上海国资(2015年8期)2015-12-23 01:47:27