
计及位置不确定的喷雾机喷杆系统仿形姿态渐近跟踪控制*
2022-03-10 08:37芦泽阳李树江王向东
应用数学和力学 2022年2期
芦泽阳, 李树江, 王向东
(沈阳工业大学 信息科学与工程学院,沈阳 110870)
引 言
喷杆式喷雾机作为田间复杂环境下喷药作业的主要植保机型,喷杆位置的平稳快速升降操作是保障喷雾机进行高精准喷洒、施药均匀作业的关键环节.由于喷雾机的喷杆具有长臂展、喷幅宽及刚柔耦合等特点,易受小幅振动的影响,其末端大幅抖动,严重破坏机体平衡,甚至发生喷杆触打损伤作物和末端折断的不良情况.喷杆有害起伏摆动还会导致雾滴喷洒均匀性下降,重复喷洒与遗漏喷洒交替出现,无法保证预期防治病虫害的效果,甚至造成生态环境污染和经济损失不可逆的后果[1-2].因此,研究喷雾机喷杆系统喷药位置,高精准地仿形跟踪作物冠层高度,对提高喷雾机喷雾均匀性和作业效率具有重要意义.
针对喷雾机喷杆位置装置多采用弹簧等柔性连接进行减振,此装置虽然可以减弱复杂路况波动对喷杆产生的有害摆动,但无法使喷杆跟随冠层高度起伏变化进行主动药物喷洒[3].针对喷雾机喷杆位置高度控制的研究[4-6],相关学者采用传统PID 控制策略,基于高度传感器完成了喷杆高度控制系统设计.但由于在实际作业中外部环境复杂多变,而选取固定的控制参数喷杆易出现震荡、超调甚至发散的控制效果,导致算法适应性差难以满足高精准喷射要求.
由于电液伺服系统具有快响应、强负载等特点,已逐步成为喷雾机喷杆系统位置升降的主动调节机构,对其采用智能控制方法[7]或输出反馈方法[8]进行控制均难以达到精度要求.为了获得更好的伺服跟踪性能,国内外学者采用先进控制策略在伺服系统上进行应用研究[9-15].文献[9]对伺服系统进行了线性化约简处理,并假设系统模型精确已知,设计了控制器,但未考虑参数摄动问题.然而,之前的研究未曾完全考虑由于复载变化、未建模动态误差、传感器噪声、未建模不确定,及物理参数摄动等综合因素对系统产生的不利影响, 这些因素均可能导致喷杆系统产生强烈抖振,具有较差的稳定性和较低的控制精度.反步法针对具有严格反馈形式的非线性系统的控制器设计是有效的[16],但推导中需要重复对虚拟量微分,导致计算量呈现爆炸式增长.同时,由于小波网络将神经网络结构与信号多分辨尺度有效结合起来,使其具有良好的逼近非线性能力[17].
因此,由上述讨论可知,笔者目前尚未见有计及强非线性与强复杂性的喷雾机喷杆系统仿形姿态渐近跟踪控制问题的研究.所以,本文结合喷雾机喷杆喷洒药物的实际过程与客观事实,主要针对喷雾机喷杆仿形系统,同时考虑减小液压升降调节机构的物理参数不确定性、电液和喷杆刚柔耦合以及外界干扰等对系统精度与稳定性的不利影响,为提高仿形系统跟踪误差收敛精度,首次提出了一种基于小波网络的自适应鲁棒与反步法相结合的控制方法.采用设计的小波基元构造神经网络,满足最优误差有界条件下逼近虚拟等效控制律和未建模动态,系统不确定参数由自适应更新律进行处理,引入鲁棒项补偿复合干扰项.基于稳定性理论,证明了喷雾机喷杆位置姿态跟踪误差渐近收敛于原点.仿真结果表明,本文所提控制方法能够较优地满足系统动稳态特性要求.
1 喷杆仿形系统模型与控制目标
喷雾机喷杆仿形控制系统结构如图1 所示.
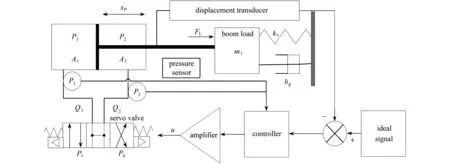
图1 喷杆仿形控制系统结构图Fig.1 The structure diagram for the spray boom posture profiling control system
建立喷杆仿形系统运动学模型,力平衡方程描述为

式中,P1,P2为 无、有液压杆腔压力;A1,A2为 无、有液压杆腔有效面积;mt为喷杆质量;xp为喷杆位移;bp为活塞阻尼黏性系数;FL为作用于喷杆可建模外负载力.
忽略外泄漏对机构的影响, 流量方程描述为

式中, βe为弹性模量;ctm为 内泄漏系数;Q1,Q2为进、出液压油缸流量.
无杆腔油缸和有杆腔油缸体积分别描述为

式中,V1,V2为两腔体积,V01,V02为两腔初始量.
流入无杆腔与流出有杆腔流量描述为

式中,Cd为流量系数, ω为 滑阀面积梯度, ρ为油液密度,Ps为供油压力,P0为回油压力.
阀芯位移xv与电流i等 效为比例环节,令u=i描 述为xv=kvu(kv>0) .定义状态变量x=[x1,x2,x3,x4]T=,整理式(1)~(5)可得


式中

通过式(7)可知,喷雾机喷杆仿形系统存在流量系数Cd、泄漏系数ctm等 参数摄动,负载FL外 部干扰及较强非线性特性.由实际系统可知,不失一般性,提出如下假设.
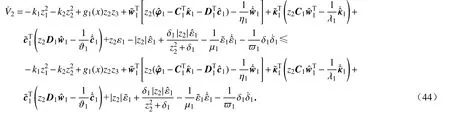
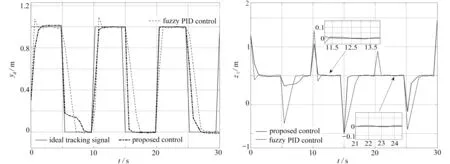
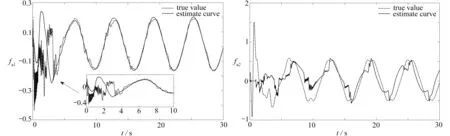
假设1① ∃cM∈R+, 使指令信号yd满 足‖yd‖≤cM成 立;② 复合干扰Di(i=1,2)描 述为|Di| 主要控制目标: 针对式(1) ~ (5)描述喷雾机喷杆位置仿形系统, 当存在参数摄动、未建模动态及干扰影响时, 在假设1 条件下, 设计具有强鲁棒性的喷杆位置仿形跟踪控制器, 使闭环控制系统跟踪误差渐近收敛于零 ,即l imt→∞z1(t)→0. 考虑由物理参数摄动、外扰动及未建模动态组成的D1和D2,在实际系统中往往是未知的,为实现对目标轨迹仿形跟踪的高精准控制要求,克服系统因阶次较高带来计算复杂的问题,设计一种小波基元,在满足误差有界条件下构造神经网络进行估计,提高系统鲁棒性. 考虑采用如式(8)小波基元形式: 式中 构造小波神经网络,描述为 式中,w∗,κ∗,c∗为最优逼近参数. 证明采用最优参数估计值代替最优逼近参数,则最优估计函数描述为 整理式(13)和(14)可得 式中 由式(8)可知,各阶导数均有界,故∃c1∈R,∃c2∈R,∃c3∈R,使 将式(15)代入式(14)中,整理得最优估计误差为 式中,Jσ为常数. 最优误差描述为 即定理1 得证. 式中 计及喷杆位置仿形系统阶次较高且为严格反馈形式,引入反步法与自适应鲁棒相结合的复合控制策略,采用式(8)小波基元构造网络估计非线性和不确定未知项,既简化了控制器设计过程,同时改善了传统反步法中计算复杂的问题,降低了对输入指令阶次要求. 第1 步定义第一个误差为 对式(19)求导得 选取虚拟控制量为 式中,k1>0为待设计控制参数. 第2 步定义第二个误差为 对式(22)求导得 式中,k2>0为待设计控制参数. 设计鲁棒补偿项为 参数更新律设计为 鲁棒项更新律设计为 第3 步定义第三个误差为 对式(31)求导得 式中,k3>0为待设计控制参数. 设计鲁棒补偿项为 参数更新律设计为 鲁棒项更新律设计为 至此,喷雾机喷杆系统仿形姿态跟踪控制器设计完成. 本文的主要结论可归纳为定理形式给出. 定理2针对式(1)~(5)描述的以喷杆为负载闭环系统(式(7)),当系统存在物理参数摄动、外部负载干扰及不可建模动态时,在满足假设2 以及任意有界初始条件V(0)≤q(∀q∈R+)的情况下,采用控制律式(33)、参数更新律式(26)~(30)和式(35)~(39)、鲁棒补偿项式(25)和(34)设计喷杆仿形控制器,使得以下结论成立: ① 闭环系统具有稳定性且各信号最终一致有界; ② 喷杆仿形位置跟踪控制器输出误差渐近收敛于零,即为l imt→∞z1(t)→0. 证明针对第一个子系统考虑Lyapunov 函数: 对式(40)求导整理得 针对第二个子系统考虑Lyapunov 函数: 将式(18)和(25)代入式(24)中,整理得 对式(42)求导得 将参数更新律式(26)~(30)和鲁棒补偿项(25)代入式(44),整理得 考虑整个系统Lyapunov 函数: 将式(18)和式(34)代入式(33),整理得 对式(46)求导得 将参数更新律式(35)~(39)和鲁棒补偿项(34)代入式(48),整理得 由式(49)可知,V(t)∈L∞且 为非增有界函数,所以l imt→∞V(t)=V(∞)存在,故有 通过式(50)得zi(t)∈L2且z˙i(t)∈L∞,即l imt→∞zi(t)→0,故可知仿形跟踪误差渐近收敛于零. 综上所述,对于式(7)描述的闭环系统具有鲁棒稳定性且所有信号最终一致有界,跟踪误差满足渐近收敛性能,即定理2 得证. 注1目前研究均可得到闭环系统信号半全局最终一致稳定且跟踪误差有界的结论.本文所提鲁棒自适应反步复合控制的新方法,结合小波神经网络并满足最优误差有界的条件下,引入鲁棒阻尼项补偿复合扰动,使位置输出跟踪误差渐近收敛到零,闭环系统具有更强的鲁棒稳定性和误差渐近收敛性,假设条件更弱且更接近于实际喷杆系统,设计方法更具一般性. 充分考虑大型农田区域种植农作物的实际分布情况,为了更好地促进农作物高效生长,时常在种植区域将两种不同种类农作物进行高低交叉种植以保证相互促进彼此生长.故设置由周期式冠层高度模拟信号yd作为目标高度进行仿形跟踪,假设高低种植的两种农作物的模拟参考信号幅值为1 m(即种植高农作物的冠层高度为1 m,低农作物贴近地面种植高度近似为0 m),占空比为5 0%,即进行等距离种植. 采用文献[7]中实际工程应用广泛、性能优良的复合模糊PID 控制算法进行仿真对比实验,结合本文所建立的具有非线性特性的喷雾机喷杆仿形系统模型式(7),对比复合控制算法设计如下:① 确定系统输入输出.设计复合模糊PID 控制器为二输入三输出系统,选取喷杆给定位置高度与实际输出位置高度信号的差值z1及 其变化率zec作 为仿形控制器输入值,并将需要整定参数 ΔKp, ΔKi和 ΔKd作为控制器输出值.② 模糊集划分.将控制器输入误差z1及 变化率zec与 需整定参数 ΔKp, ΔKi和 ΔKd的模糊子集均划分为7 个等级,其中模糊子集划分与各元素含义依次为 NB(负大)、 N M(负中)、 NS (负小)、 ZO(零)、 PS(正小)、 PM (正中)、 PB(正大).③ 模糊规则推理.制定完善的模糊控制规则,由专家经验分析与总结,制定误差z1及 变化率zec均 为 7 ×7条模糊规则,将完整的模糊规则采用Mamdani 方式推理.④ 解模糊化.使用加权平均法解模糊化处理.初始化一组PID 参数,由模糊控制器输出ΔKp,ΔKi和ΔKd对初始参数进行动态调整,得到最优参数值,从而实现喷杆仿形系统位置调节智能控制器的设计.仿真结果如图2 和图3 所示. 图2 为本文所提方法与文献[7]采用方法在喷雾机喷杆仿形跟踪控制响应曲线与误差曲线的性能比较,可以看出,采用文中所提方法设计的喷杆位置仿形控制器相较于复合模糊PID 智能控制算法设计的控制器具有较小的超调量,所提方法跟踪曲线过渡平稳且调节时间较短,能够较好地仿形跟踪给定模拟参考信号.由右侧跟踪误差曲线结果可见,在5~8 s 以及17~21 s 区间内,所提控制方法动态响应快、稳态精度高、鲁棒性能好、整体跟踪误差较小且系统仿形跟踪性能优于文献[7]中采用的复合模糊PID 智能控制算法,更好地满足喷杆高精度喷洒要求.所设计小波网络能够对系统复合干扰进行有效地估计,提高了系统仿形跟踪控制精度,所提控制方法跟踪误差在11.5~14 s 及21~24 s 平稳跟踪区间内能够渐近收敛于零的显著优势,与定理2 中误差渐近收敛结论相呼应,验证了主要结论的正确性与合理性. 图2 仿形位置跟踪曲线与跟踪误差曲线Fig.2 The profiling position tracking curve and the tracking error curve 图3 为喷雾机喷杆位置姿态控制器推导过程中小波网络系统逼近效果图.可以看出逼近趋势一致、精度较高且逼近效果良好.对虚拟量与未知量进行了有效估计,简化控制器结构设计,克服了因系统阶次较高带来的复杂计算问题,降低了输入信号要求.因此,本文所提控制方法可获得更好的控制品质和满意的控制效果. 图3 逼近估计曲线Fig.3 The approximating estimate curves 本文研究了具有强非线性、强复杂性等特征的喷雾机喷杆系统高精度快速稳定姿态仿形跟踪控制问题.提出了一种基于小波神经网络与自适应鲁棒反步相结合的仿形跟踪控制方法,在减小强非线性对仿形控制器设计困难同时,针对液压机构和负载系统不确定参数进行自适应更新估计和鲁棒阻尼补偿,抑制了外界干扰及电液耦合效应对系统的消极影响.在适当的假设条件下,严格推导出选用由文中设计的小波基元构造的神经网络逼近虚拟等效控制量的正确与合理性,改善了传统反步技术的复杂计算“爆炸性”问题,降低了输入信号的高阶次要求,约简了控制器设计过程.仿真结果表明,本文所提方法有效地提升了喷雾机喷杆仿形系统的鲁棒稳定性与干扰抑制性,可实现喷杆高精度快速姿态升降机动调整控制.2 小波网络设计















3 喷杆仿形控制器设计

















4 系统稳定性分析










5 仿真验证

6 结 论
猜你喜欢
工业设计(2022年8期)2022-09-09
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
科学家(2022年3期)2022-04-11
小学阅读指南·低年级版(2020年11期)2020-11-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
网络空间安全(2019年8期)2019-03-18
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
