
基于Mate30高速摄影的断路器分合闸速度测试方法研究
2022-03-10 06:18刘银
机电信息 2022年4期



摘要:基于华为Mate30智能手机的高速摄影功能,通过在机构基座和动作部件上粘贴标志,加装刚分刚合时刻检测回路等辅助措施,对弹簧机构断路器动作过程进行高速拍摄,然后通过对视频图像进行位置标记识别和刚分刚合点的时间标记识别,分析获得的断路器分合闸位移过程曲线,并进一步求导得出速度。
关键词:华为Mate30;高速摄影;断路器机械特性;分合闸速度测试
中图分类号:TM561;TB872 文献标志码:A 文章编号:1671-0797(2022)04-0072-03
DOI:10.19514/j.cnki.cn32-1628/tm.2022.04.021
1 断路器分合闸速度测试现行方法
断路器的分合闸速度是断路器机械特性参数中重要的指标参数,它影响着断路器的灭弧能力和机械耐久性,如果速度过慢将会导致拉弧时间过长损伤触头,甚至导致电弧不能熄灭造成断路器故障;如果速度过快则断路器机构将承受过大的冲击,造成相关机械零件的机械疲劳,进而引发零件失效导致断路器动作异常(注:分闸速度指断路器触指刚刚分开时刻起,向后至10 ms过程的平均速度,即刚分速度;合闸速度指断路器触指刚刚接触时刻起,向前10 ms过程的平均速度,即刚合速度)。
然而,由于断路器动作时间一般只持续30~70 ms[1],非常短暂,这就对整个过程的测试精度和抗干扰性提出了很高的要求。以往的接触式传感器易受振动的影响,且安装不方便,导致该项试验数据不稳定且费时费力,甚至可能损伤设备,因此,研制一种基于高速摄影的测试技术十分必要。
目前,国内正在使用的断路器分合闸速度测试仪均采用接触式传感器,测量量包括直线变位和旋转角度变位,其中旋转角度变位使用较多。但现有技术存在以下几方面的缺点:
(1)测试结果易受到振动影响,导致多次重复数据结果的一致性较差。
(2)角度传感器与机构相连使用磁铁方式的,如果运动中心对不齐将导致测试结果不稳定。
(3)使用螺丝安装的,多次安装将造成螺牙磨损,导致下次测量困难。
(4)传感器安装步骤包括盖板拆除、固定夹安装、传感器安装、数据线连接等,费时费力。
2 华为Mate30性能及其测试断路器机械特性的可行性
通过网络查询,得知华为Mate30智能手机视频每秒30帧,最大放慢速度为256倍,每个慢放视频将生成1 000帧图片。所以每段视频对应实际时间段T=1 000÷30÷256×1 000≈130.2 ms,时间覆盖最长合闸时间(70 ms)。同时可得拍摄速度为v=1 000/T≈7.68帧/ms,即每毫秒将产生7.68帧图像。整个70 ms动作过程将生成500余帧图像,也就是说,形成的动作曲线将有500多个采样点,滿足采样密度要求。所以,使用华为Mate30智能手机进行断路器分合闸速度测试具有可行性。
3 基于高速摄影的分合闸速度测试步骤
根据实际测试,获取可用于分析的机构动作慢放视频需要经过8个步骤,如图1所示。
(1)在断路器机构基座和与动作连杆相连的部件(如连杆轴侧面或位置指示板)上粘贴便于计算机识别定位的单色标志,分别作为静样本和动样本。
(2)测量动静样本在初始位置时的距离,用来作为图像识别时的长度标尺。
(3)将特制的刚分/刚合时刻检查回路接入断路器导体回路,用以在视频中标记刚分/刚合时刻。刚分/刚合时刻检查回路使用发光二极管实现触发,发光二极管触发为微秒级,对于10 ms平均速度计算时域可以忽略不计。
(4)使用支架架设华为Mate30,调整镜头范围,使机构动作部分尽可能大地占满镜头,这样可以使得分析像素增加,精度提高。
(5)开始拍摄前应首先开启华为Mate30,由运动触发高速摄影。
(6)触发断路器动作,执行分闸或合闸操作。
(7)检查华为Mate30是否生成了视频,视频范围是否包含全部动作画面,画面是否清晰,动静样本在运动中是否无反光等明显变化。
(8)完成视频录制后,需将视频从手机中导出,并检查文件是否可在运行数据分析的电脑上正常打开。
4 慢放视频分析步骤
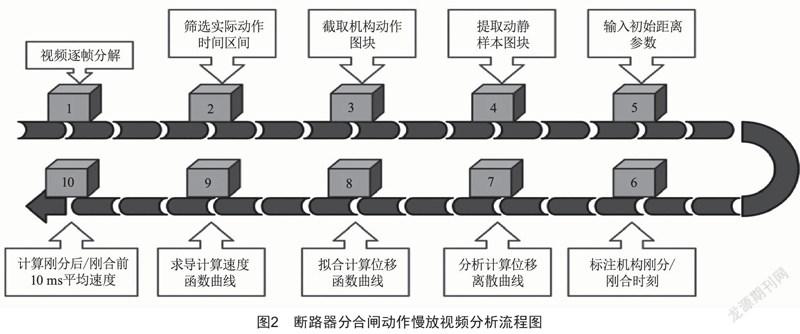
断路器分合闸动作慢放视频分析流程如图2所示。
视频从华为Mate30手机中复制到电脑后,需要按照以下10个步骤进行数据分析。
(1)视频逐帧分解:将拍摄的视频逐帧分解成独立的图片。按照华为Mate30的性能,将会形成1 001张照片,对应实际约130 ms的动作视频[2]。
(2)筛选实际动作时间区间:从逐帧分解出来的独立图片中筛选出机构真正动作的部分及前后图片有变化的部分,精确定位时间区间,减少数据分析量。断路器分闸一般30~50 ms,合闸一般50~80 ms,对应需要筛选出400~600张图片。
(3)截取机构动作图块:通过软件截取筛选出来的每一张图片的固定区域,精确定位真正活动的区域,以减少数据分析量。
(4)截取动静样本图块:通过软件截取动静样本图块,用于后续跟踪定位计算。
(5)输入初始距离参数:通过现场测量的动静样本图块间实际距离,可以换算图块中相邻像素点对应的实际距离,实现像素和实际距离的换算。
(6)标注机构刚分/刚合时刻:通过连续的图片找到刚分/刚合标志灯状态变化(刚分时由亮变灭,刚合时由灭变亮)的图片编号,并换算为时间轴上的时刻点,作为刚分/刚合的时刻点。
(7)分析计算位移离散曲线:对所有图片进行动静样本匹配分析,获得样本在图片中的相对坐标,然后计算动静样本坐标距离,换算成位移变化表,最后绘制动静样本位移变化离散折线。
(8)拟合计算位移函数曲线:对位移变化离散折线进行拟合计算,形成平滑的唯一函数曲线。此处使用多项式进行拟合,多项式指数经测试应≥5。
(9)求导计算速度函数曲线:对位移曲线进行求导,获得速度曲线,如图3所示。
(10)计算刚分后/刚合前10 ms平均速度:通过速度曲线和刚分时刻进行积分后除以10 ms获得分合闸速度,或通过位移曲线计算位移总和后除以10 ms获得分合闸速度,如图4、图5所示。
5 误差分析
本文测试方法产生的误差主要由计时误差Δt、图像像素换算误差Δp、动静样本位置识别误差Δs和拟合曲线计算误差Δf等组成。
(1)计时误差Δt由手机晶振周期误差和刚分刚合时刻检测回路中的二极管开关速度决定,手机CPU为麒麟990 5G,主频8.86 GHz,计时精度高,误差可以忽略不计;二极管开关速度达到微秒級,也可以忽略不计。所以,Δt≈0。
(2)图像像素换算误差Δp,以西门子3AP1-FG断路器合闸为例,初始距离139 mm,初始像素149,测量误差为±1 mm,所以Δp=±1/149 mm。
(3)动静样本位置识别误差Δs,本文所开发的软件经过测试,误差约为1像素,对应139/149 mm,即Δs=
±139/149 mm。
(4)拟合曲线计算误差Δf,统计平均误差小于1 mm。
综上所述,在不考虑计时误差的情况下,整体位移误差Δ=Δp+Δs+Δf=±(1/149+139/149+1)≈±1.94 mm。相对于初始距离139 mm,误差率δ=1.94/139×100%≈1.396%。一般分合闸速度测试结果为2.5 m/s左右,1.396%的精度下误差仅为0.034 9 m/s,满足试验精度要求。
6 结语
通过实际测试,使用华为Mate30智能手机的高速摄影功能,配合识别标志和刚分刚合时刻检测回路,可以准确测量断路器的分合闸速度参数。由于华为Mate30购买成本不足3 000元,如果能够在电力行业推广使用,一方面将有效提升试验质量,另一方面还可以提高工作效率,更具有经济性的一面是还可以降低试验成本,因此这是一种具有显著综合效益的实用技术,是视觉识别技术代替机械传感技术的一次技术创新。
[参考文献]
[1] 李红松,邓旭东.统计数据分析方法与技术[M].北京:经济管理出版社,2014.
[2] 魏溪含,涂铭,张修鹏.深度学习与图像识别原理与实践[M].北京:机械工业出版社,2019.
收稿日期:2021-11-30
作者简介:刘银(1983—),男,河北沧州人,高级工程师,研究方向:变电检修运维、高压试验。
3007500338217
