
基于PSO-BP的甘蔗施肥监控系统设计与试验
2022-03-09 01:53陈远玲李尚平金亚光欧阳崇钦
农业工程学报 2022年22期
陈远玲,侯 怡,李尚平,2,金亚光,欧阳崇钦
基于PSO-BP的甘蔗施肥监控系统设计与试验
陈远玲1,侯 怡1,李尚平1,2※,金亚光1,欧阳崇钦1
(1. 广西大学机械工程学院,南宁 530004;2. 广西民族大学电子信息学院,南宁 530006)
针对甘蔗横向种植机的施肥机构由于肥料潮湿结块易堵塞等问题,该研究对施肥机构进行电液传动与控制改造,构建了一套基于粒子群(Particle swarm optimization,PSO)-前反馈(Back Propagation,BP)神经网络预测的施肥监控系统。以施肥马达的压力、转速及肥料箱中肥料量为输入参数,将施肥机构的工作状态(空载状态、正常状态、重载状态、堵塞状态)作为输出,通过BP算法建立输入与输出之间的映射关系,并用PSO算法优化BP算法的权值与阈值,相比未优化BP算法,优化后的工作状态预测准确率由97%提高到99%。以识别施肥机构工作状态响应准确率以及重载状态下堵塞预防概率为试验指标进行车间试验,结果表明:工作状态响应识别准确率为89%;重载状态下,控制系统控制施肥马达正反转并消除堵塞的概率为87.5%。在田间试验中,监控系统能准确预测施肥机构的重载状态并自动执行防堵控制指令,没有出现堵塞故障。该施肥防堵塞监控系统无需上位机,能够满足复杂多变工况下施肥机构的工况预测及防堵控制要求,可为其他施肥机构的自动化改造提供参考。
农业机械;设计;甘蔗;横向种植机;施肥机构;PSO-BP;监控系统
0 引 言
蔗糖生产在中国社会经济发展中具有重要的战略地位[1-4],甘蔗机械化种植是提高产量、降低生产成本的重要手段[5]。甘蔗的种植方式主要分为纵向种植和横向种植,甘蔗横向种植具有用种少、单位面积出苗率高,土地利用率高,且抗倒伏能力强等优势。目前国外还没有关于甘蔗横向种植机的研究报道,国内李尚平等对甘蔗横向种植机进行了重点研究[6-10]。施肥是甘蔗横向种植中的重要一环,自动、连续、均匀、精量控制施肥对促进甘蔗生长、提高生产率和降低甘蔗种植成本具有重要意义。
国内外关于施肥机构的控制研究主要集中在与农艺相结合的变量施肥控制[11-16]、定位施肥控制[17-18]以及施肥量的监测[19-22]等方面,关于施肥堵塞状态监控的研究还鲜有报道。
由于糖料蔗主要分布在广西、云南等丘陵地区,甘蔗种植机运行工况比较复杂,工作参数具有时变性和非线性等特点,很难通过建立单一参数的数学公式来预测施肥机构的工况和采取相应的控制措施,导致施肥机构堵塞故障率高,堵塞对链条、传动轴造成破坏后维修困难。现有采用多传感器信息融合的的农机智能监测系统设计一般都包含有上位机和下位机[23-25],系统复杂,成本比较高。本研究采用先在线下训练算法模型,再将训练好的模型嵌入到单片机中实时在线监控施肥机构的方法,以减少施肥机构堵塞,提高甘蔗种植机自动化水平。
1 施肥结构与工作原理
甘蔗机械传动式施肥机构主要由肥料箱、螺旋输送机、链轮链条传动装置、凸轮间歇机构等组成,其动力由地轮通过链条输入,如图1所示。

1.肥料箱 2.螺旋输送机 3.螺旋轴 4.链条传动装置 5.凸轮间歇机构 6.地轮
大量试验及应用发现,机械传动式施肥机构不适应丘陵地形和黏土蔗地。由于施肥机构采用地轮和链传动,当肥料因潮湿结块等原因形成堵塞时,会频繁出现螺旋轴破坏、链条拉断、链轮齿磨损等问题,需要停工维修,极大影响种植机的工作效率。
针对上述问题,本文对施肥机构进行液压传动与控制改造,增加单片机控制系统全程监控施肥状态;左右旋向相反的螺旋输送机通过中间联轴器连接、取消双边地轮驱动结构,改为单个液压马达驱动,保证了左右螺旋输送机工作同步;同时为便于清堵增加了清堵排肥管。
改进后的施肥机构如图2所示。施肥机构左右对称设计可实现双行同时施肥,左、右螺旋轴通过中间联轴器相连,由液压马达代替地轮输入驱动扭矩。螺旋轴带动肥料从中间肥料箱向两边输送,完成间歇撒肥工作;当肥料输送通道重载即将堵塞时,液压马达接收监控系统控制指令进行反向转动,使肥料从清堵排肥管排出,从而疏通料槽,避免堵塞。
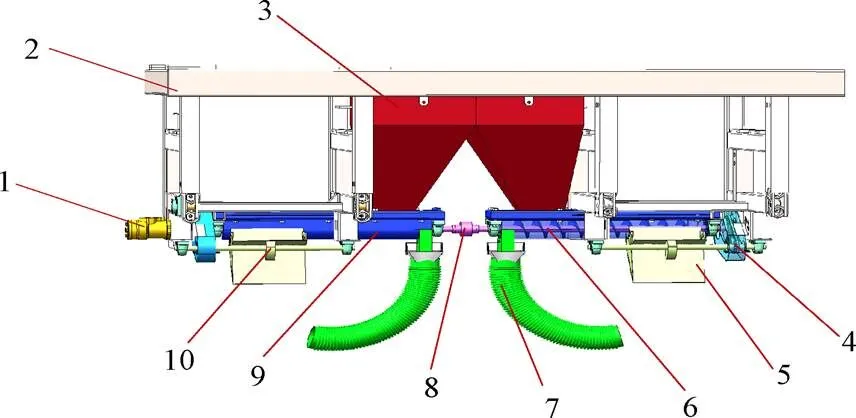
1.液压马达 2.机架 3.肥料箱 4.带防尘罩的链轮 5.排肥口 6.螺旋轴 7.清堵排肥管 8.联轴器 9.料槽 10.凸轮间歇机构
图3为甘蔗间歇精准施肥示意图,横向种植的甘蔗排种(种植)间距1为30~35 cm,肥料需要精准落在两根甘蔗之间,施肥间距2需要控制在30~35 cm左右。通过液压马达改变凸轮机构的转速,进而调节间歇撒肥的间距。

1.凸轮间歇机构 2.肥料 3.垄沟 4.蔗种
1.Cam intermittent mechanism 2.Fertilizer 3.Ridge furrow 4.Sugarcane seed
注:为垄高,cm;1为排种间距,cm;2为施肥间距,cm;3为垄宽,cm;1为蔗种长度,cm。
Note:is ridge height, cm;1is seed spacing, cm;2is fertilizing spacing, cm;3is ridge width, cm;1is sugarcane seed length, cm.
图3 甘蔗间歇精准施肥示意图
Fig.3 Schematic diagram of intermittent precision fertilization for sugarcane
2 螺旋轴受力分析
影响螺旋输送机螺旋轴扭矩的主要因素为肥料颗粒对螺旋轴和螺旋叶片的反作用力,其中包括肥料颗粒对螺旋轴作用力的摩擦力矩1、肥料颗粒对螺旋叶片表面作用力的力矩2、肥料颗粒对螺旋叶片侧面(厚度表面方向)作用力的力矩3,螺旋轴受力分析如图4所示。

假设肥料颗粒在螺旋输送机的料槽中是全腔存料,取螺旋叶片单位圈数(一个螺距)某一半径微圆环d为对象进行力学分析。如4图中d所示,叶片表面的微圆环的肥料质量为

注:为螺旋轴转动角速度,rad·s-1;为肥料对螺旋轴微元表面的周向摩擦力,N;L 为螺旋轴长度,mm;e为螺旋叶片厚度,mm;为料槽与叶片外边缘间的肥料对叶片边缘的径向挤压力,N;为微圆环宽度,mm;为微圆环上肥料质量,kg;为肥料对叶片厚度e方向上的摩擦力,N;d 为螺旋轴直径,mm;D 为螺旋叶片直径,mm;r为微圆环半径,mm;为肥料对螺旋叶片的支持力,N;为微圆环半径r处的螺旋升角,(°);S 为螺距,mm;为微圆环上的肥料对螺旋叶片的摩擦力,N。




单圈微圆环上的肥料在螺旋叶片上的作用力为
则在长度的螺旋轴上,肥料在螺旋叶片上的作用力对螺旋轴轴线的力矩为
将式(3)~(8)代入式(9)可得:



则螺旋轴所受总力矩为

根据式(14)可知,螺旋输送机的螺旋轴在输送肥料颗粒时,施肥液压马达的负载扭矩来自于螺旋轴的阻力力矩1、2、3之和,当螺旋轴上的阻力力矩之和大于液压马达最大输出扭矩时就会造成肥料输送的堵塞。
3 施肥监控系统设计
3.1 施肥数据采集与分析
甘蔗横向种植机的施肥与供种均采用液压马达驱动。施肥马达与供种马达由单泵供油,供种马达的工作状态会影响到施肥马达的工作状态,因此供种马达的压力和施肥马达的压力、转速反映甘蔗横向种植机施肥机构工作状态。在车间,以甘蔗横向种植机为测试对象,测量供种马达的负载压力和施肥马达的负载压力与转速,同时记录2个肥料箱中肥料量,单个或者2个肥料箱没有肥料时记录为0,2个肥料箱都有肥料时记录为1。为了完整准确地得到各个工作状态数据,启动甘蔗横向种植机的供种和施肥工序,通过调速阀调节液压马达工作转速,测量时间为5个工作日,如图5所示。

图5 施肥数据采集
根据试验记录下的堵塞时刻,找到对应时刻的数据。肥料箱中没有肥料且施肥机构没有肥料排出的时刻对应数据为空载数据,施肥机构正常抛撒肥料的时刻对应数据为正常数据,施肥马达出现运行抖动、间隙转动的时刻对应数据为重载数据,肥料箱中有肥料且液压马达卡死不转的时刻对应数据为堵塞数据。截取部分典型信号如图6所示,可以观察到图中有一段典型的堵塞信号,施肥液压马达负载压力陡然升高,而施肥液压马达转速急剧降低,为施肥机构发生堵塞的信号,本文将这一类数据信号归为施肥机构堵塞工况,如图6a中2、3。
本液压系统的调速阀带有压力补偿的减压阀,所以堵塞前施肥液压马达的转速没有速降,但是施肥液压马达的负载压力会发生波动或者小幅度陡增,对应的部分螺旋轴(施肥液压马达)转速如图6b所示。根据甘蔗施肥堵塞的经验,堵塞前施肥马达的负载压力会出现明显的大幅波动(即出现重载),本研究将堵塞前5~10 s的数据归类为重载工况数据,如图6a中1、4。施肥液压马达工作状态的变化会引起供种液压马达压力的变化,但是变化很小,本文忽略供种液压马达压力变化的影响。
3.2 PSO-BP神经网络建模
选择施肥液压马达的压力、转速和肥料箱中的肥料状态量作为输入,一个输出为施肥工作状态,神经网络模型的输入层节点数为3,输出层节点数为1,隐含层的节点数为5,构建如图7所示的神经网络模型。隐含层到输出层的激活函数为logsig型函数,如式(15)所示,输入层到隐含层的激活函数为tansig型函数,如式(16)所示。
注:图a中1、4表示施肥液压马达压力出现明显大幅波动的典型数据;2、3表示施肥液压马达压力陡然升高的典型数据。
Note: The numbers 1 and 4 in fig.a are typical data of significant fluctuations in the pressure of the hydraulic motor for fertilizer application; the numbers 2 and 3 are typical data of sudden increase of hydraulic motor pressure for fertilizer application.
图6 部分典型数据信号
Fig.6 Some typical data signal

注:x1为神经网络的第1个输入;x2为神经网络的第2个输入;x3为神经网络的第3个输入;Wij 为输入层至隐含层的权值;bi为输入层至隐含层的阈值;f1(x)、f2(x)、f3(x)、f4(x)、f5(x) 为隐含层的值;vi 为隐含层至输出层的权值;a为隐含层至输出层的阈值;Y 为神经网的输出。
BP神经网络中的隐含层是由输入层样本经过加入阈值和权值的线性叠加,然后运用tansig激活函数激活得到,隐含层输出的计算如下:
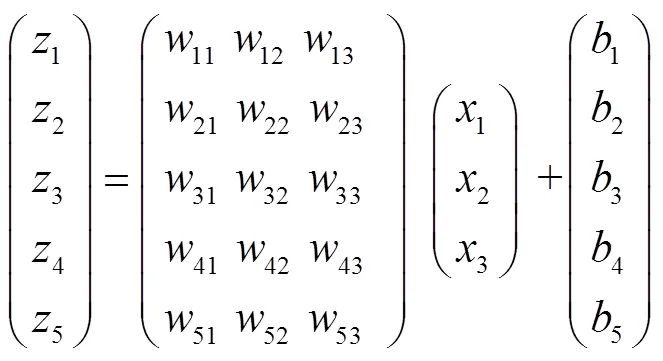
其中
激活的隐含层神经元继续向前传播至输出层,根据隐含层—输出层的连接权值、阈值和隐含层的值计算出输出层的值,如式(20)~(21)所示。
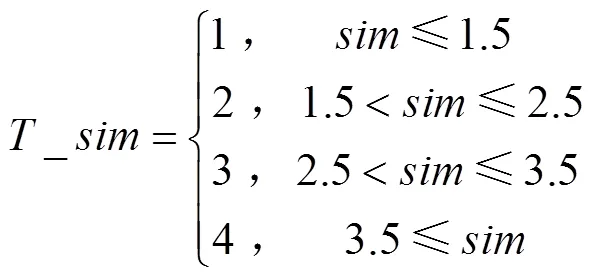
神经网络学习每种施肥状态的特征,整理含有4种施肥状态的400组数据,将其中300组分为训练集,其余100组为测试集,为了使模型具有推广性,在MATLAB程序中采用randperm函数对数据进行随机分组。由于计算机只能识别数字,所以输出的4种状态分别用1、2、3、4表示,1为空载状态、2为正常状态、3为重载状态、4为堵塞状态。而BP神经网络的输出结果带有小数,因此对输出结果取整,如式(22)所示。
3.3 算法预测结果与权值阈值确定
构建神经网络预测肥料的堵塞状态,以准确率和决定系数(2)作为评价指标。将训练好的BP神经网络对100组测试数据进行测试,预测的准确率为97%,决定系数2为0.977 5,将训练好的PSO-BP神经网络对100组测试数据进行测试,预测的准确率为99%,决定系数2为0.982 9,PSO优化BP神经网络具有更好的预测效果,本文选择PSO-BP神经网络作为预测施肥工作状态的网络模型。



(25)

3.4 控制系统硬件设计
单片机控制电磁换向阀使其处于右位状态时施肥液压马达正转,肥料从排肥口排出。当肥料箱中的肥料用完时,压力变送器、转速传感器和光电传感器检测到“空载信号”,单片机预测肥料箱中无肥料,发出蜂鸣警报声,提醒农户向肥料箱中加肥料,施肥机构空载状态如图 8a所示。
单片机预测施肥机构为正常运行状态时,控制施肥液压马达正转,肥料沿料槽向两边正常排出,施肥机构正常运行状态如图8b所示。
当压力变送器、转速传感器和光电传感器检测到“重载信号”,单片机预测施肥机构正在处于重载状态,即将发生堵塞,控制警报灯闪烁,并且切换电磁换向阀至左位状态,液压马达反转5 s,再切换电磁换向阀至右位状态,液压马达正转2 s,再切换电磁换向阀至左位状态,液压马达反转5 s,肥料从清堵排肥管流出,料槽疏通,液压马达正反转共12 s后解除闪烁警报灯,并切换电磁换向阀至右位状态,重载状态如图8c所示。
肥料堵塞在螺旋输送机的料槽时,为了保护各个零部件不受破坏,单片机控制电磁换向阀处于中位状态,即液压马达停止转动,同时单片机控制报警器发出闪烁警报灯与蜂鸣警报声,提示农户检查施肥机构状态,图 8d为施肥机构堵塞状态。
作为施肥机构控制系统的核心部件,控制中心需对获取的各类信息进行高效实时处理。兼顾实用与成本因素,选择AT89C52RC单片机作为控制芯片,压力采集模块中的压力变送器检测范围0~20 MPa,压力变送器输出0~5 V电压模拟量信号,由于单片机只能识别数字信号,所以在压力变送器与单片机之间加一个ADC0832型AD数模转换模块;转速采集模块中的转速传感器选用霍尔接近开关,在螺旋轴上粘贴12个永久磁铁,即螺旋轴转一圈霍尔接近开关会收到12个脉冲信号;肥料量检测模块采用光电传感器进行肥料量检测;红外模块采用红外遥控紧急中断或临时人工控制施肥系统;电源来自拖拉机的24 V车载电源,通过降压稳压模块为单片机供电。电磁换向阀选择四位三通阀,蜂鸣警报与闪烁警报分别采用有源蜂鸣器和循环闪烁警报灯。控制系统硬件实物图如图9所示,箭头方向为信号或指令传输方向。

1.蜂鸣器 2.警报灯 3.单片机 4.光电传感器 5.肥料箱 6.转速传感器 7.排肥口 8.清堵排肥管 9.液压马达 10.液压管道 11压力变送器 12.电磁换向阀
3.5 控制系统软件设计
施肥机构的控制实质上是利用压力变送器实时采集液压马达的压力值和霍尔接近开关实时采集螺旋轴(施肥液压马达)的转速值,光电传感器实时监测肥料箱中的肥料状态量,单片机在线实时运行在MATLAB中训练出来的PSO-BP网络模型,不进行输出结果的反归一化处理下计算输出值。当肥料箱里无肥料即施肥机构空载时<0.25,报警模块发出警报声通知;施肥机构出现重载时(一般堵塞)0.5≤<0.75,动作模块电磁铁换向,同时发出闪烁警报灯通知;施肥机构出现严重堵塞时0.75≤<1,报警模块发出警报声和闪烁警报灯通知。控制流程如图 10所示。

1.警报器 2.ADC芯片 3.压力变速器 4.霍尔接近开关 5.24转5 V电源模块 6.LCD显示屏 7.单片机 8.电磁换向阀 9.继电器 10.红外遥控器 11.红外接收模块 12.光耦开关 13.光电传感器 14.继电器

图10 控制流程图
4 施肥监控试验与结果分析
为测试施肥监控系统的状态预测准确率、重载状态后防止堵塞的能力,并验证施肥监控系统在田间作业的可行性,进行施肥监控系统试验,试验用的甘蔗横向种植机如图11所示。

图11 试验样机
4.1 车间试验内容与方法
试验时共取200 kg复合肥分成3等份,其中一份为干燥复合肥,一份为潮湿复合肥,一份为潮湿结块混合复合肥,试验肥料分配表如表1所示。将3份肥料分别装入肥料箱中,其中最底层为干燥复合肥,中间为潮湿复合肥,最上层为潮湿结块混合复合肥。液压工作站提供液压动力,待系统稳定运行后,开启单片机检测施肥机构工作状态,记录空载、正常、重载、堵塞状态下监控系统是否能准确监测施肥机构工作状态,并执行相关控制动作。重复试验5次。
其中空载状态的正确动作为开启警报声、关闭闪烁灯、电磁换向阀处于右位,螺旋轴正转;正常施肥状态的正确动作为关闭警报声、关闭闪烁灯、电磁换向阀处于右位,螺旋轴正转;重载状态的正确动作为关闭警报声、开启闪烁灯、循环切换电磁换向阀左右位,螺旋轴正反转;堵塞状态的正确动作为开启警报声、开启闪烁灯、电磁换向阀处于中位,螺旋轴不转。

表1 试验肥料
4.2 车间试验结果分析
车间5次重复试验的施肥状态监测结果如表2所示。从表2中看出,除了正常运行外,试验共记录18次工况特征,其中空载6次、重载状态运行10次(包括正确识别8次,误判2次)、堵塞状态运行2次。在7次重载预测中,控制系统控制施肥机构的螺旋轴反转运行了5 s再正转2 s,再反转运行5 s后,施肥机构恢复正常正转运行;在1次重载预测中,控制系统控制电磁换向阀切换到左位,但液压马达不能反转,进而控制系统发出了堵塞信号;施肥螺旋轴出现1次直接卡死现象,控制系统来不及判断重载信息就发出了堵塞信号。
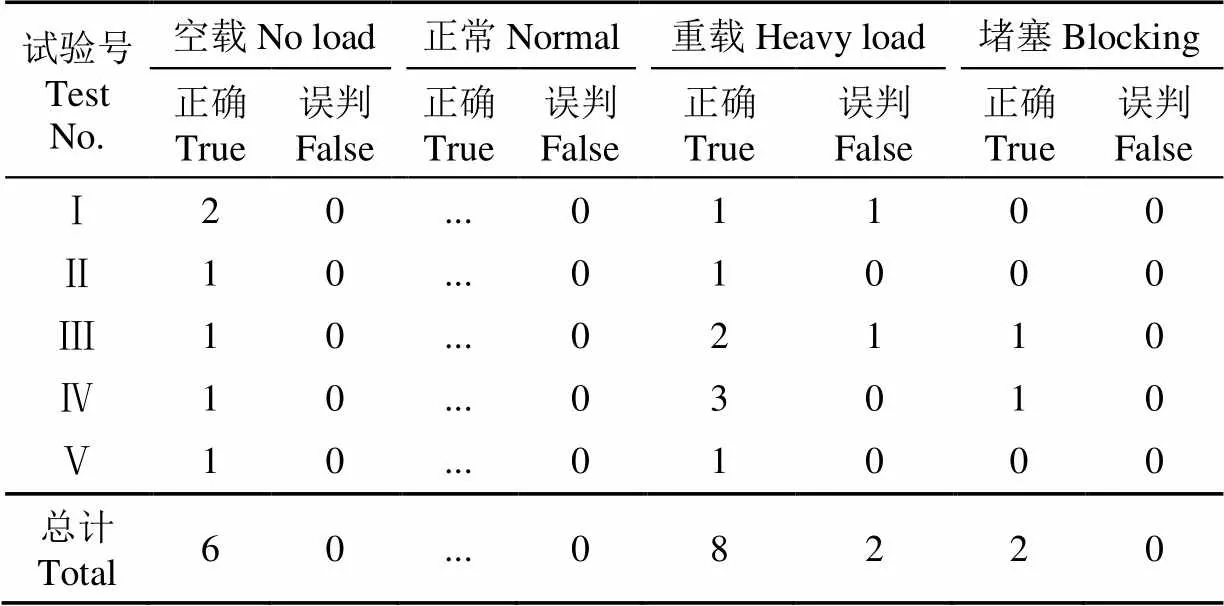
表2 施肥状态监测结果
注:“...”代表长时间正常施肥。
Note: “... ” represents long-term normal fertilization.



4.3 田间试验内容与方法
为验证甘蔗横向种植机施肥控制系统在田间作业的可行性,于2022年1月19-20日在广西崇左市农科新城基地进行试验,天气为小雨。在肥料箱中倒入复合肥,田间作业时,人工跟随甘蔗横向种植机关注并记录施肥系统运行情况,包括肥料箱中的肥料状态、蜂鸣器、警报灯和电磁换向阀的动作,在施肥控制系统执行每个控制动作后,立即观察施肥机构的工作状态是否正确试验共进行2 d。
4.4 田间试验结果分析
在2 d的田间试验中,空载状态出现5次,控制系统能准确发出警报声;2022年1月20日上午10时,出现2次重载状态,控制系统都能准确识别,并且预测即将发生堵塞,执行了电磁换向阀切换控制,螺旋轴循环正反转后,施肥流畅,试验中未出现突然急剧堵塞状态,施肥作业效率可达到0.20~0.33 hm2/h,图12a为甘蔗横向种植机田间试验施肥效果图,施肥效果比较好,满足种植需求。
相比较于2021年3月在广西崇左市农科新城基地试验机械传动式甘蔗施肥机构,频繁出现地更换链条、链轮、螺旋轴以及肥料箱中没有肥料但不易被发现的现象,经电液改进的施肥机构施肥作业效率提升2倍以上,图 12b为改进前施肥机构维修现场。

图12 田间试验
5 结 论
1)以液压马达负载压力、转速、肥料箱中的肥料状态量为输入值,空载、正常、重载、堵塞四个工作状态为输出值,进行BP和PSO-BP神经网络状态预测训练,其中BP的状态识别率为97%、PSO-BP的状态识别率99%,利用PSO优化的神经网络对施肥状态识别精度更高。
2)将离线训练好的PSO-BP神经网络嵌入单片机控制程序中,基于多传感器信息融合,利用单片机控制器可在线实时监测施肥机构工作状态,控制系统可根据实际工况进行相应控制,工作状态预测准确率为89%,识别重载状态后能防止堵塞的概率为87.5%。
3)从甘蔗横向种植机田间作业效果看,本文提出的甘蔗种植机施肥监控控制系统满足田间施肥作业监控要求,可有效降低堵塞故障率,减少停机维修时间,相比改进前的机械传动式施肥机构具有高可靠性和2倍以上的作业效率。
[1] 崔永伟,杜聪慧,李树君. 广西甘蔗种业产业化发展分析与展望[J]. 农业展望,2119,15(11):57-62.
Cui Yongwei, Du Conghui, Li Shujun. Analysis and prospect on industrialization development of sugarcane seed industry in guangxi[J]. Agricultural Outlook, 2019, 15(11): 57-62. (in Chinese with English abstract)
[2] 王永通. 广西甘蔗机械化收获现状与发展建议[J]. 南方农业,2021,15(8):177-178.
[3] 莫仁相. 甘蔗全程机械化农艺配套技术初探与对策[J]. 农业开发与装备,2019(3):160-161.
[4] 许世超,姚引倩,庄泽城. 广西甘蔗收获机械化发展现状与对策[J]. 安徽农业科学,2022,50(3):269-270,279.
Xu Shichao, Yao Yinqian, Zhuang Zecheng. The development status and countermeasures of mechanization of sugarcane harvesting in Guangxi[J]. Journal of Anhui Agricultural Sciences, 2022, 50(3): 269-270, 279. (in Chinese with English abstract)
[5] 龙鲜玲. 甘蔗种植作业机械化的应用实践探索[J]. 南方农业,2020,14(32):182-183.
[6] 梁文鹏,莫建霖,曾伯胜,等. 2CZD-1型段茎式甘蔗种植机设计与试验[J]. 现代农业装备,2020,41(2):18-26.
[7] Zhong J Q, Tao L M, Li S P, et al. Design and evaluation of a novel transversal double-bud sugarcane planter with seed pre-cutting[J]. Sugar Tech, 2021, 23(5): 1147-1156.
[8] Li Z, Lin Z, Li S, et al. Optimization research on the working parameters of sugarcane harvester on the cutting time of stalks using virtual prototype technology[J]. Sugar Tech, 2022, 25(1): 1-16.
[9] Gan F, Liang Y, Zhang Y, et al. Design and experiment of sseed compensator device for transversal sugarcane planter with seeds pre-cutting[J]. Sugar Tech, 2022, 25(5): 1511-1569.
[10] Li K, Li S, Teng X, et al. Integrated design and evaluation of a soil-covering and film-mulching device for sugarcane transverse planters[J]. Agronomy, 2021, 11(7): 1382-1397.
[11] Su N, Xu T, Song L T, et al. Variable rate fertilization system with adjustable active feed-roll length[J]. International Journal of Agricultural and Biological Engineering, 2015, 8(4): 19-26.
[12] 白秋薇,张信,罗红品,等. 设施果园自动对靶精准变量施肥控制系统[J]. 农业工程学报,2021,37(12):28-35.
Bai Qiuwei, Zhang Xin, Luo Hongpin, et al. Control system for auto-targeting precision variable-rate fertilization of fruit trees in a greenhouse orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(12): 28-35. (in Chinese with English abstract)
[13] 余洪锋,丁永前,刘海涛,等. 小田块变量施肥系统优化设计与应用[J]. 农业工程学报,2018,34(3):35-41.
Yu Hongfeng, Ding Yongqian, Liu Haitao, et al. Optimization design and application of variable rate fertilization system for small-scaled fields[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(3): 35-41. (in Chinese with English abstract)
[14] 张季琴,刘刚,胡号,等. 排肥单体独立控制的双变量施肥控制系统研制[J]. 农业工程学报,2021,37(10):38-45.
Zhang Jiqin, Liu Gang, Hu Hao, et al. Development of bivariate fertilizer control system via independent control of fertilizing unit[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(10): 38-45. (in Chinese with English abstract)
[15] 施印炎,陈满,汪小旵,等. 稻麦精准变量施肥机排肥性能分析与试验[J]. 农业机械学报,2017,48(7):97-103.
Shi Yinyan, Chen Man, Wang Xiaochan, et al. Analysis and experiment of fertilizing performance for precision fertilizer applicator in rice and wheat fields[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 97-103. (in Chinese with English abstract)
[16] Wan C, Yang J, Zhou L, et al. Fertilization control system research in orchard based on the PSO-BP-PID control algorithm[J]. Machines, 2022, 10(11): 982-991.
[17] 宗泽,刘刚. 基于机器视觉的玉米定位施肥控制系统设计与试验[J]. 农业机械学报,2021,52(S1):66-73.
Zong Ze, Liu Gang. Design and experiment of maize fertilization control system based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(S1): 66-73. (in Chinese with English abstract)
[18] 赵硕,宗泽,刘刚. 基于电机驱动的定位施肥控制系统设计与试验[J]. 农业机械学报,2019,50(S1):91-95,114.
Zhao Shuo, Zong Ze, Liu Gang. Design and test on position fertilization control system based on motor drive[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(S1): 91-95,114. (in Chinese with English abstract)
[19] Fulton J P, Shearer S A, Chabra G, et al. Performance assessment and model development of a variable-rate, spinner-disc fertilizer applicator[J]. Transactions of the ASAE, 2001, 44(5): 1071-1081.
[20] Tola E, Kataoka T, Burce M, et al. Granular fertiliser application rate control system with integrated output volume measurement[J]. Biosystems Engineering, 2008, 101(4): 411-416.
[21] 周利明,马明,苑严伟,等. 基于电容法的施肥量检测系 统设计与试验[J]. 农业工程学报,2017,33(24):44-51.
Zhou Liming, Ma Ming, Yuan Yanwei, et al. Design and test of fertilizer mass monitoring system based on capacitance method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 44-51. (in Chinese with English abstract)
[22] van Bergeijk J D, Goense D, van Willigenburg L G, et al. Dynamic weighting for accurate fertilizer application and monitoring[J]. Journal of Agricultural Engineering Research,2001, 80(1): 25-35.
[23] 王奇,高鹏翔,王金武,等. 胡萝卜联合收获机智能监控系统设计与试验[J]. 农业机械学报,2022,53(6):118-128.
Wang Qi, Gao Pengxiang, Wang Jinwu, et al. Design and experiment of intelligent monitor system for carrot combine harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(6): 118-128. (in Chinese with English abstract)
[24] 赵立新,张增辉,王成义,等. 基于变距光电传感器的小麦精播施肥一体机监测系统设计[J]. 农业工程学报,2018,34(13):27-34.
Zhao Lixin, Zhang Zenghui, Wang Chengyi, et al. Design of monitoring system for wheat precision seeding-fertilizing machine based on variable distance photoelectric sensor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 27-34. (in Chinese with English abstract)
[25] Jin X, Zhao K, Ji J, et al. Design and experiment of intelligent monitoring system for vegetable fertilizing and sowing[J]. The Journal of Supercomputing, 2020, 76(5): 3338-3354.
Design and experiments of the fertilization monitoring system based on the PSO-BP for sugarcane
Chen Yuanling1, Hou Yi1, Li Shangping1,2※, Jin Yaguang1, Ouyang Chongqin1
(1.,,530004,; 2.,,530006,)
Sugarcane is mainly planted in hilly areas, such as the province of Guangxi and Yunnan, China. Time-varying and nonlinear working parameters can often be found in the sugarcane horizontal planters, due to the relatively complex and changeable operating conditions. A high failure rate of blockage can often occur in the fertilization mechanism in this case. Moreover, it is difficult to maintain the damage to the chain and drive shaft after the blockage. The performance of fertilization can also be reduced to destroy the transmission mechanism, because the wet and agglomerated fertilizer can be concurrently blocked in the fertilization mechanism of the sugarcane horizontal planter. Moreover, it is still lacking in the automatic control of clearing and blocking in the fertilization mechanism of mechanical transmission type. In this study, a fertilization monitoring system was proposed to carry out the electro-hydraulic transmission and control transformation of the fertilization mechanism. A set of fertilization and anti-blocking control system was constructed using Particle Swarm Optimization (PSO) - Back Propagation (BP) neural network prediction. The input parameters were taken as the pressure and speed of the fertilizing motor, as well as the amount of fertilizer in the fertilizer tank, whereas, the output was the working state (no load, normal, heavy load, and blocked) of the fertilizing mechanism. The BP neural network was used to establish the mapping relationship between the input and the output. The PSO was used to optimize the weights and thresholds of the BP. After that, the prediction accuracy increased from 97% to 99%, and the determination coefficient2increased from 0.977 5 to 0.982 9. The results showed that the PSO-optimized BP neural network presented a better prediction effect. The BP neural network optimized by the PSO was used to identify the fertilization state with higher accuracy. The PSO-optimized BP neural network was selected as the network model to predict the working state of fertilization. The control program of the single-chip microcomputer was written into the trained prediction model. The control system of the fertilizer application mechanism was designed, where the pressure transmitter was to collect the pressure value of the hydraulic motor, the Hall proximity switch was to collect the speed value of the screw shaft, and the photoelectric sensor was to monitor the fertilizer status in the fertilizer box in real time. The workshop test was carried out, where the test indicators were the accuracy rate to identify the response of the fertilization mechanism working state, and the probability of preventing blockage under heavy load. The results showed that: the accuracy rate of working state response recognition was 89% under the heavy load state. The control system was used to control the forward and reverse rotation of the fertilization motor. The probability was 87.5% for the removal of blockages. Therefore, the monitoring system with a neural network can be used to accurately identify the various working states of the fertilization mechanism during the field experiment. The heavy-load state of the fertilization mechanism can be accurately predicted by the monitoring system. The anti-blocking control command was executed without blockage failure. Anyway, the fertilization anti-clogging monitoring system can fully meet the working condition prediction and anti-clogging control requirements of the fertilization mechanism under complex and changeable working conditions. Consequently, the working condition monitoring and anti-blocking control system of the fertilization mechanism in the sugarcane planters can be expected to promote the high quality and efficiency of fertilization operations, in order to effectively reduce the blockage failure rate and the time of downtime for troubleshooting. This finding can also provide a new reference for the automation transformation of fertilization.
agricultural machinery; design;sugarcane; transverse planter; fertilization mechanism; PSO-BP; monitoring system
10.11975/j.issn.1002-6819.2022.22.003
S147.2
A
1002-6819(2022)-22-0023-09
陈远玲,侯怡,李尚平,等. 基于PSO-BP的甘蔗施肥监控系统设计与试验[J]. 农业工程学报,2022,38(22):23-31.doi:10.11975/j.issn.1002-6819.2022.22.003 http://www.tcsae.org
Chen Yuanling, Hou Yi, Li Shangping, et al. Design and experiments of the fertilization monitoring system based on the PSO-BP for sugarcane[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(22): 23-31. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.22.003 http://www.tcsae.org
2022-06-24
2022-11-10
国家自然科学基金项目(52165009);广西科技开发重点项目(2018AB01002);国家重点试验室开放课题基金(SKLCUSA-b201706)。
陈远玲,教授,研究方向为农业机械的液压传动与控制。Email:cylgxdx@gxu.edu.cn。
李尚平,博士,教授,博士生导师,研究方向为甘蔗机械设计。Email:spli501@vip.sina.com。
猜你喜欢
小猕猴学习画刊(2019年8期)2019-09-16
特别健康(2018年3期)2018-07-04
小学生导刊(2017年15期)2017-05-17
中国糖料(2016年1期)2016-12-01
作文大王·低年级(2016年9期)2016-09-21
棋艺(2016年4期)2016-09-20
电子制作(2016年19期)2016-08-24
中国塑料(2016年3期)2016-06-15
工业炉(2016年6期)2016-04-10
液压与气动(2015年6期)2015-04-16
