基于DTW的复杂飞行动作快速评估方法研究
2022-03-08 01:34闫文君程贤斌
中国电子科学研究院学报 2022年1期
方 伟,王 玉,闫文君,程贤斌
(1.海军航空大学,山东 烟台 264001;2.海战场信息感知与融合技术国家级实验教学中心,山东 烟台 264001)
0 引 言
随着飞行控制系统的迅速发展和投入使用,大大提高了飞行训练的安全性和可靠性[1]。飞行动作评估是飞行训练重要环节,是对飞行训练结果的定性分析,因而科学有效的飞行动作评估对提高飞行训练的有效性具有重要作用。传统的评估方法主要以人工测评为主,不但需要大量的人力成本,而且效率较低、主观性强[2]。
为解决人工测评的问题,实现飞行动作的快速准确评估,学者们提出了一系列方法。如文献[3]利用视频跟踪技术对飞行动作视频识别飞行动作,通过构造误差反向传播神经网络的智能评估模型对飞行轨迹的特征点集经行训练,实现五等级的飞行动作评估;文献[4]采用改进序关系分析法对飞行操纵品质评估指标体系进行权重设置,通过对各项子指标指定评分标准的方法实现飞行动作评估;文献[5]通过制定关键参数偏差等级判据的方法来实现无人机飞行动作评估;文献[6]提出结合飞行员生理信号和飞行操作参数的方法,建立基于误差反向传播神经网络的飞行动作评估模型,实现飞行动作评分。
上述评估方法都以飞行参数作为评估指标,而飞行参数本质上是一种多元时间序列数据,其具有高维度和时间不等长的特点。本文通过计算飞行动作矩阵距离实现飞行参数降维、分割和特征提取,首先,利用动态时间归整(Dynamic Time Warping,DTW)[7-8]完成复杂飞行动作语义模式距离的快速计算;然后,结合密度峰值聚类(Density Peaks Clustering,DPC)[9]的方法实现复杂飞行过程的归类评估;最后,通过对殷麦曼飞行动作实验证明该方法可行有效。
1 飞行动作状态矩阵提取
飞行动作可以分为基本单元和组合单元[10],基本单元为基本飞行动作,组合单元为复杂飞行动作,复杂飞行动作可以分解为基本飞行动作。基本飞行动作实际上是飞行动作状态参数按一定规则在时间上保持或变化的集合,因此飞行动作状态可以客观反映飞行员操作水平,继而可以通过比对飞行动作状态变化过程实现复杂飞行动作的评估,评估流程图如图1所示。
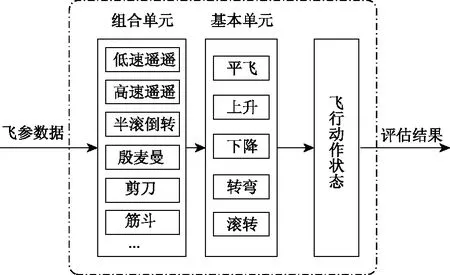
图1 评估流程图
飞参数据由飞参记录系统记录存储,可以复现整个飞行过程实现对飞行动作的人工测评[11]。通过对飞参数据的分析,为实现飞行动作的自动评估,本文选取由高度轴、俯仰轴、航向轴和滚转轴数据构成的飞行动作状态作为评估对象。高度轴数据为相对于平均海平面的海拔高度变化,向上为正;航向轴数据为机体轴在水平面的投影与地轴间夹角的角度变化(航向角变化Δψ),机头右偏航为正;俯仰轴数据为机体轴与水平面夹角的角度变化(俯仰角变化Δθ),抬头为正;滚转轴数据为机体轴与机体轴铅垂面间的夹角变化(滚转角变化Δγ),飞机右滚转时为正;坐标表示如图2所示。
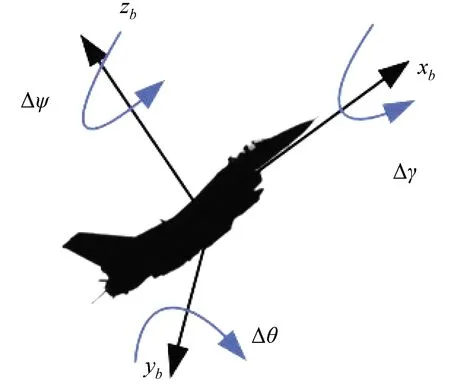
图2 坐标表示
根据飞行轨迹和飞机姿态,飞行动作状态可以分为17种,包括上升飞行,水平飞行,下降飞行,水平右转飞行,水平左转飞行,右转上升飞行,右转下降飞行,左转上升飞行,左转下降飞行,垂直上升转弯飞行,垂直下降转弯飞行,水平右滚转飞行,水平左滚转飞行,上升右滚转飞行,下降右滚转飞行,上升左滚转飞行,下降左滚转飞行。参数变化特征如表1所示,其中无变化表示变化量约等于0。
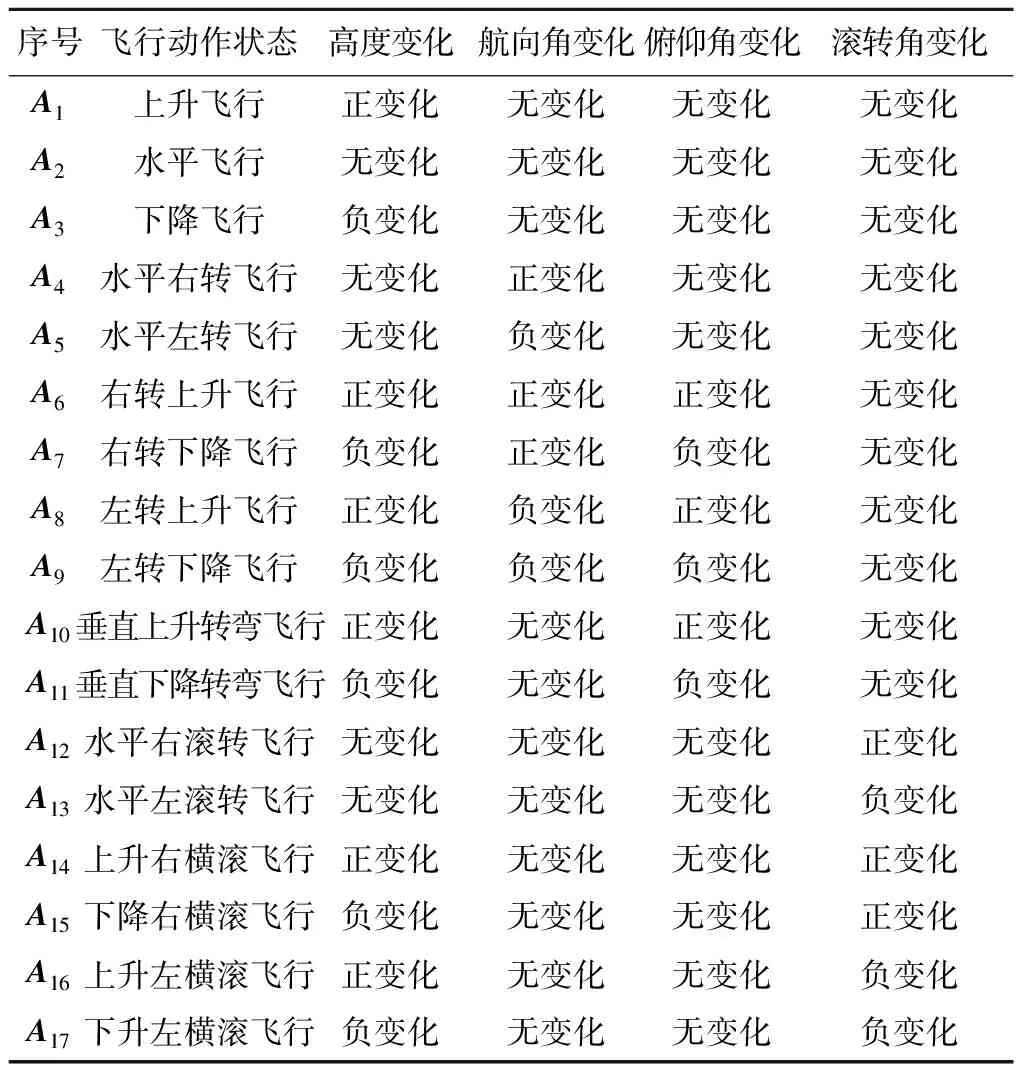
表1 飞行动作转态参数变化特征
分析飞行动作状态参数特征,构建4×3的飞行动作状态矩阵A。
其中矩阵的行分别表示高度变化、航向变化、俯仰变化和滚转变化,对应元素为1,其他为0。如A1可以表示为
2 复杂飞行动作距离计算
2.1 DTW距离
DTW距离通过动态规整实现两个序列的最优映射,能够有效解决时间序列在时间轴上的数据不对等问题,因此被广泛应用于如语音识别[12]、手势识别[13]和数据挖掘[14]等诸多领域。假设两个单维时间序列为x(i),i=1,2,…,m和y(j),j=1,2,…,n,构造距离矩阵D。
其中,
d(i,j)=(x(i)-y(j))2
(1)
式中:d(i,j)为两两时间点间的欧式距离。
DTW距离为最优规整路径累计距离r(i,j)之和,规整路径如图3所示,应满足边界性、连续性和单调性三个约束条件,即规整路径必须从d(1,1)到d(m,n),且不能跨越匹配和交叉匹配,公式为
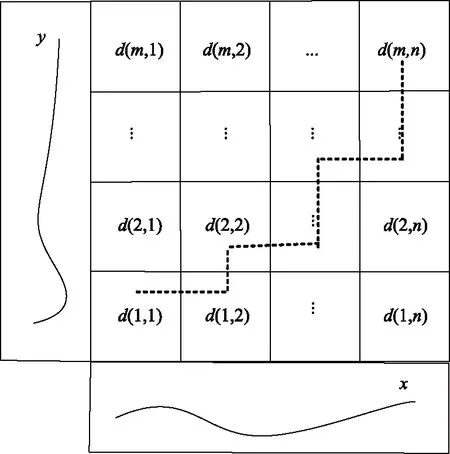
图3 规整路径
r(i,j)=d(i,j)+min{r(i-1,j-1),
r(i-1,j),r(i,j-1)}
(2)
DTW=min{r(m,n)}
(3)
2.2 语义模式距离
DTW距离在飞行数据处理方面也有诸多应用,如文献[15-16]通过计算每一项参数的DTW距离之和的方法实现多维飞行数据的匹配。但该方法存在计算复杂和忽略参数间关系的问题。为解决这一问题,本文提出利用飞行动作状态矩阵将复杂飞行动作语义化的方法,有效降低了时间复杂度和高维相关数据的维度。
在实际的飞行训练中,复杂飞行动作可以划分为进入段、动作段和改出段,在进入段和改出段参数变化符合标准的条件下,飞行动作的语义模式能够充分反映飞行员的操作过程,例如筋斗飞行动作的语义模式如图4所示。
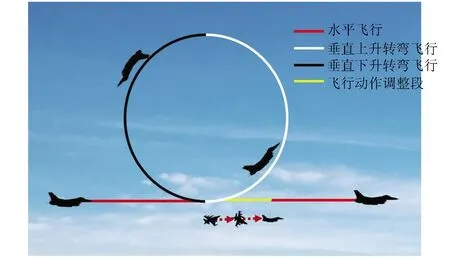
图4 筋斗飞行动作的语义模式
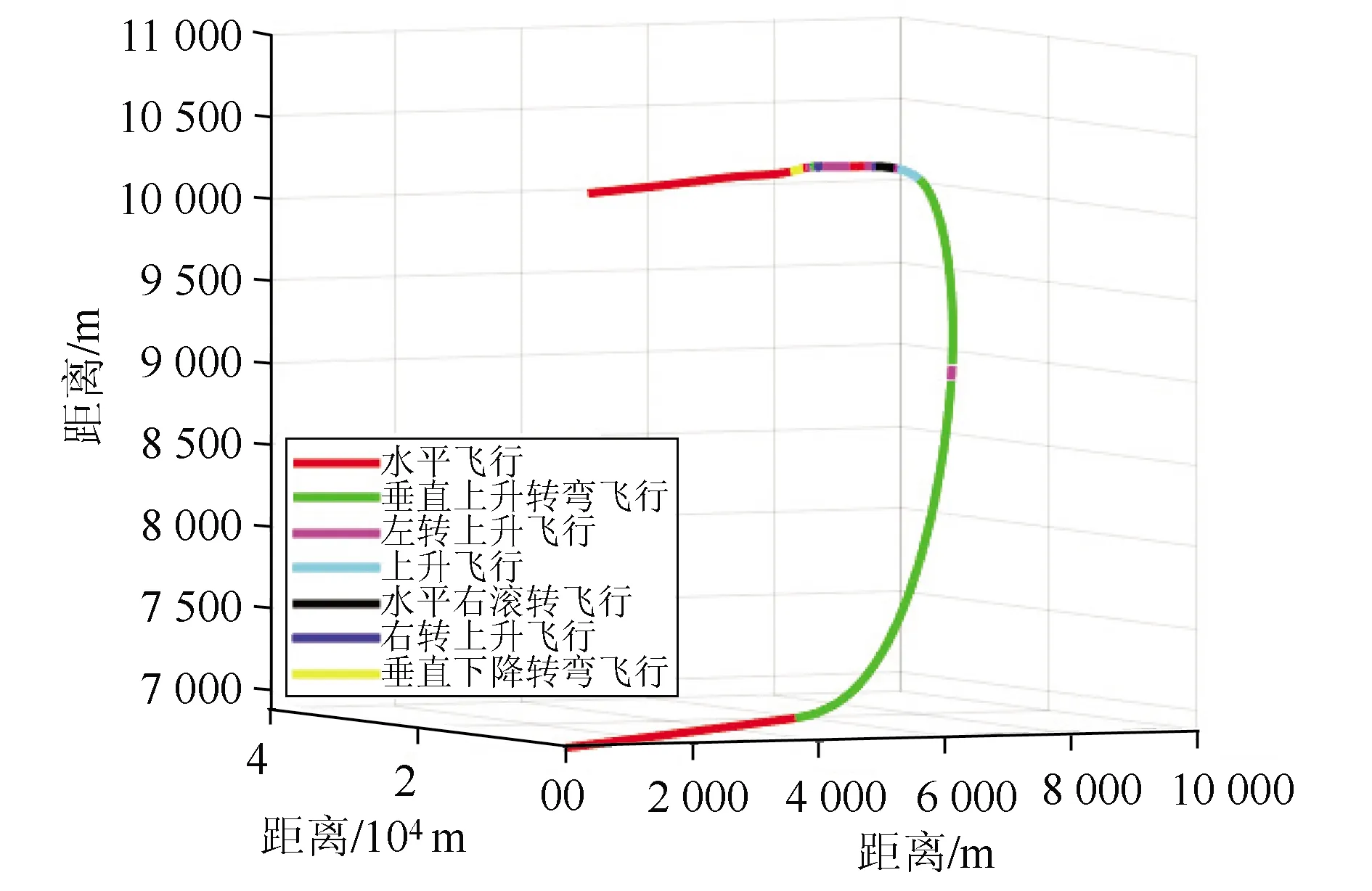
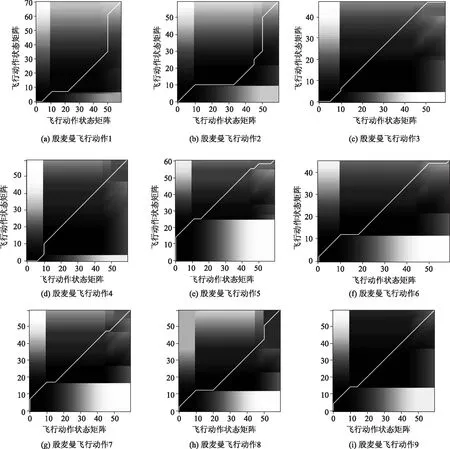
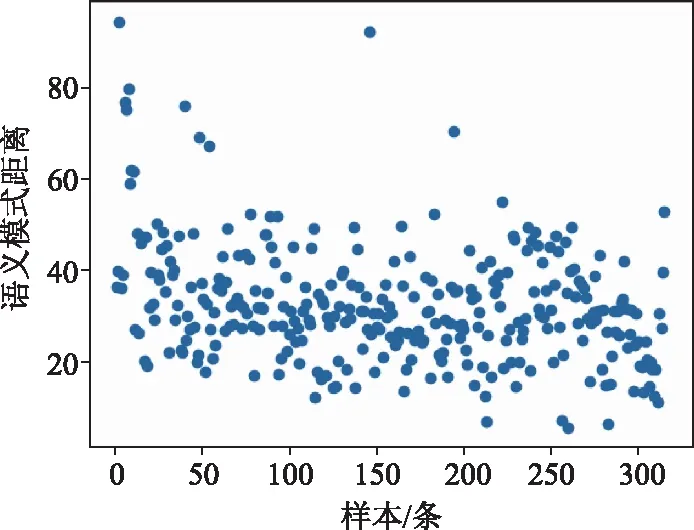
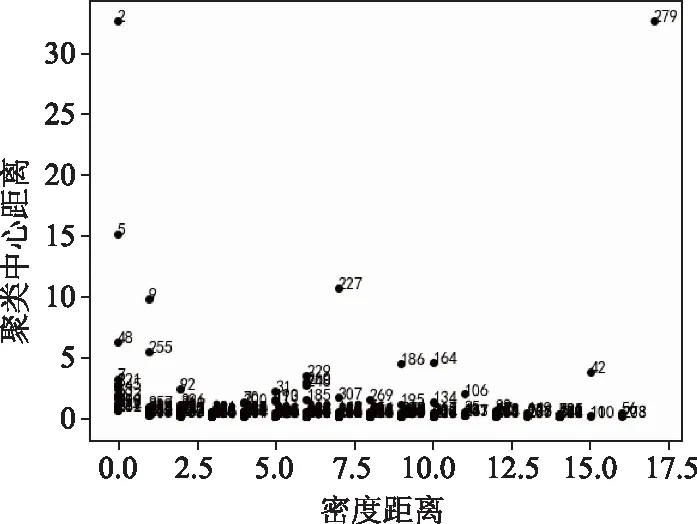
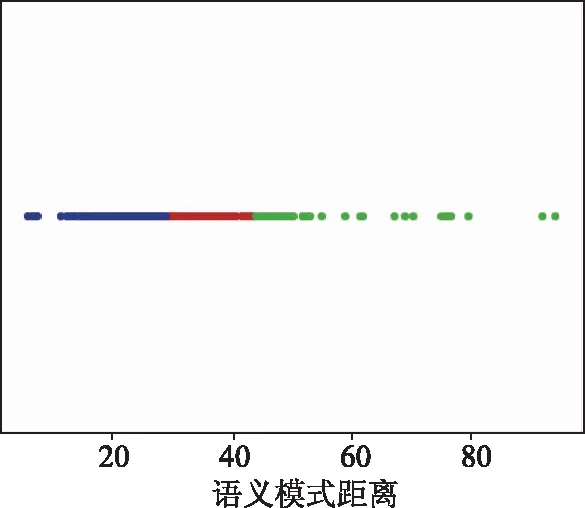
将复杂飞行动作的时间序列T={t1,t2…tn}(n=1,2,…)分段得到复杂飞行动作语义序列Ts={s1,s2,…,sm},m 在复杂飞行动作中,飞机从动作段到改出段会有飞行动作调整段(如图4所示),飞行动作调整段越短,飞行员操作水平越高。该段的飞行动作状态变化与每个飞行员操作习惯有关,其语义模式距离可能不同,但其评分标准应该相同,因此,传统的专家打分系统[18]不适用于语义模式距离等级评定。而人工测评的等级评定实际上是基于评分区间的聚类过程,并且相同等级的飞行动作得分相对集中(密度较大),可以反映飞行员的操作习惯。 因此,为实现语义模式距离的个性化等级评定,本文采用密度峰值聚类的方法针对一名飞行员飞出的复杂飞行动作语义模式距离结果进行聚类,自动划分等级区间。 DPC是一种密度聚类的方法,其基于两个假设,一是聚类中心被一些低局部密度的数据点包围,二是这些低局部密度点的距离大于其他高局部密度点的距离,有效解决了不同聚类中心密度差别大、邻域范围难以设定的问题,鲁棒性强[19]。DPC主要有两个重要参数,一是局部密度ρi表示聚类中心邻域内样本点到聚类中心的高斯距离之和;二是聚类中心距离δi表示计算算点和其他具有更高密度的点之间最小距离。对于样本数据Z={z1,z2,…,zn}(n=1,2,…),二者的表达式如下: (4) (5) 式中:dij表示两个数据点之间的欧式距离;dc表示数据点的截断距离,dc>0。当局部密度最大时,ρi表示为数据集中与数据点的最大距离。 本文采用PREPAR3D飞行模拟软件仿真生成315条殷麦曼飞行动作,并利用tacview软件复现飞行过程和提取飞行参数,采样频率为10 Hz。硬件环境为Intel(R)Core(TM)i5-1035G1 CPU;操作系统为Windows10;算法仿真程序使用Python3.7编写。以每十个数据点为周期对每段殷麦曼飞行动作进行等长分割,结合飞行动作状态参数特征对分割后的数据段进行识别,得到每段殷麦曼飞行动作的语义模式,如图5所示。图中下侧水平飞行段表示殷麦曼飞行动作进入段,上侧水平飞行段为其改出段,垂直上升转弯飞行段和水平右滚转飞行段为动作段,动作段与改出段之间为此条殷麦曼飞行动作的飞行动作调整段,其他为由于操作失误产生的错误飞行动作状态。不难看出,此条殷麦曼飞行动作中错误飞行动作状态较少,但飞行动作调整段的飞行动作状态较多,真实客观真实地反映了飞行操作过程。 图5 殷麦曼飞行动作的语义模式 将315条殷麦曼飞行动作的语义模式按飞行动作状态矩阵重新表示,得到一个315×4×3的样本数据集。计算其与殷麦曼飞行动作的标准飞行动作状态表示的DTW距离,得到规整路径(部分规整路径如图6所示)及样本数据集的语义模式距离(如图7所示)。 图6 规整路径 图7 语义模式距离 设置采样频率分别为10 Hz、20 Hz和30 Hz,以前20条殷麦曼飞行动作飞参数据为样本,将本文算法与文献[15]和文献[16]算法在时间复杂度上进行对比(如表2所示)。结果显示,语义模式距离的时间复杂度更小,在运算速度上具有明显优势。 表2 算法时间复杂度比较 以语义模式距离为参数,利用DPC对其进行聚类,找到样本数据集的密度中心,即飞行员的操作习惯过程的聚类中心,得到每个数据点的密度距离和聚类中心距离(如图8所示),应选取两者都较大的数据点作为聚类中心。 图8 密度距离和聚类中心距离 将样本数据集分为三种,由图8可知,聚类中心分别为第42个数据点、第227个数据点和第279个数据点,并按语义模式距离重新排序,将聚类结果划分为优秀、良好和及格,如图9所示。图中蓝色段为优秀,红色段为良好,绿色段为及格。 图9 聚类区间 通过比对数据得到各等级相对应的评分区间,当殷麦曼飞行动作的语义模式距离小于29时,评定结果为优秀;当殷麦曼飞行动作的语义模式距离大于29小于44时,评定结果为良好;当殷麦曼飞行动作的语义模式距离大于44时,评定结果为及格。评定结果与专家打分比较,证明该方法可行有效。 本文针对复杂飞行动作提出了一种基于DTW的动作评估方法。通过构建飞行动作状态矩阵计算复杂飞行动作的语义模式距离,有效利用了参数间的关系对复杂飞行动作进行降维表示,科学客观复杂飞行动作的飞行轨迹,减小了DTW距离运算时间复杂度,大大提高计算速度。利用DPC对复杂飞行动作语义模式距离进行聚类,自动推算评分区间,该评分区间由飞行员的训练数据获得,具有较强的针对性,更有利于飞行员对每次飞行进行分析,发现操作习惯的不足,提高飞行操作水平。对进一步实现飞行操作品质评估具有一定借鉴意义,具有良好的应用前景。3 DPC等级评定
4 算例分析

5 结 语
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
小学生导刊(2018年34期)2018-12-18
现代计算机(2018年27期)2018-10-25
雷达学报(2017年6期)2017-03-26
互联网天地(2016年1期)2016-05-04
长江学术(2016年4期)2016-03-11
现代计算机(2016年17期)2016-02-28
山东青年(2016年3期)2016-02-28
人间(2015年21期)2015-03-11
母子健康(2015年1期)2015-02-28