基于多估计器平均值的深度确定性策略梯度算法
2022-03-07 03:25李玉泽张钰嘉
郑州大学学报(工学版) 2022年2期
李 琳, 李玉泽, 张钰嘉, 魏 巍
(1.山西大学 计算机与信息技术学院,山西 太原 030006; 2.山西大学 计算智能与中文信息处理教育部重点实验室,山西 太原 030006)
0 引言
强化学习是机器学习中比较特殊的一类,区别于传统的监督学习和无监督学习,强化学习没有预先给出标签,而是通过和环境交互获得的奖励来判断自己决策的优劣程度[1-3],进而获得最优策略。
Q学习(Q-learning)是一种经典的基于值的强化学习算法,可用于解决马尔科夫决策过程问题(MDPs)[4]。然而,Q-learning估计Q值时存在高估问题。针对高估问题,一些方法试图通过求平均值来直接减小每个时间步的偏差[5-6],或是使用平滑的方式减少偏差[7]。 Hasselt[8]在2015年提出了双重Q学习(double Q-learning),该方法在一定程度上缓解了过估计问题。
DQN(deep Q-Network)[9-10]作为代表性的深度强化学习算法,由Mnih等提出。DQN算法在多个游戏中的表现已超越了人类玩家,但仍存在样本利用率低的问题。针对这些不足,一些研究者提出了优先经验回放[11]、竞争深度Q网络[12]和权重平均值的深度双Q网络[13]等算法。同时,因DQN采用了与Q学习类似的更新机制,同样存在高估问题。针对DQN高估问题,Van HASSELT等[14]在2015年提出了Double DQN。与Double Q-learning的思想类似,Double DQN使用2个估计器,在计算目标Q值时同时利用主网络和目标网络来计算Q值,达到了避免DQN中Q值高估的目的,使得Q值的估计更加接近真实值,并在Atari游戏上的表现超越了传统的DQN算法。
然而,基于值函数的强化学习方法存在着不能应用到连续动作空间的问题,研究者们提出了AC(actor critic)框架[15]。AC框架分离了行动策略和评估策略,能够更快输出连续动作,但这也只是解决了连续动作空间的问题。Lillicrap等[16]、Silver等[17]在确定性策略的基础上,结合AC框架提出了深度确定性策略梯度(deep deterministic policy gradient, DDPG)算法,DDPG算法最终将状态空间和动作空间都拓展到了连续空间。与DQN最大化操作类似,DDPG算法基于梯度上升来更新估计器,因此DDPG估计器的估值也存在过估计问题。为此,Fujimoto等[18]提出了双延迟深度确定性策略梯度(twin delayed deep determi-nistic policy gradient, TD3)算法,该算法采用了2个估计器网络,通过选取一对估计器网络输出的较小的Q值作为目标值更新估计器网络参数,在一定程度上缓解了DDPG过估计问题。相比DDPG算法,TD3算法估计出的Q值更加接近真实Q值,并在多个游戏中的表现优于DDPG算法。
然而,上述算法都是在解决强化学习算法的Q值高估问题。TD3算法在使用双估计器缓解高估问题的同时,由于其选取2个估计器输出的较小的Q值作为目标更新的Q值,导致TD3算法估计的Q值存在低估现象。这种低估使得估计器对Q值的估值低于真实值,而累积下来的低估会导致次优策略的发生,进而使算法性能下降。并且,TD3算法Q值的估计方差较大,估计值的波动幅度较大,这也影响到了算法的性能和稳定性。
据此,本文提出了一种基于多估计器平均值的深度确定性策略梯度(deep deterministic policy gradient based on mean of multiple estimators,DDPG-MME)算法,该算法通过平均加权来缓解上述的低估问题和稳定性问题。该算法在TD3的基础上,通过增加高估的估计器网络来平衡TD3的低估偏差,使估计器估计的Q值更加接近于真实Q值。本文分析了TD3、DDPG-MME算法估计Q值的偏差和方差,从理论上证明DDPG-MME算法估计出的Q值更加接近真实Q值且DDPG-MME算法Q值的估计方差低于TD3算法,具有更好的稳定性。
1 相关工作
1.1 强化学习基本概念
强化学习(reinforcement learning,RL)是一种从环境状态映射到动作的学习过程,其目标是使智能体(Agent)在与环境的交互过程中获得最大累积奖赏[19]。Agent在某一状态下采取某个动作,通过获得奖励或者惩罚来学习是否未来在此状态下继续采取该动作, 不断重复该过程从而逼近最优策略。强化学习过程可以抽象为马尔科夫决策过程(Markov decision process, MDP),并用马尔科夫决策过程建模。
马尔科夫决策模型为四元组
(1)S表示Agent所处状态的合集;
(2)A表示Agent所能够采取的动作的合集;
(3)R表示Agent的奖励函数;
(4)P表示转移概率函数,表示在st状态下采取动作at后转移到st+1的概率。
转移概率函数:
P[S=st+1|S=st,A=at]。
(1)
在RL中,一般假设未来越远的奖励对当前的影响越小,因此引入了折扣因子γ∈[0,1]。t时刻到T时刻的累积折扣奖励表示为
(2)
1.2 基于值函数的强化学习方法
在基于值函数的方法中,通常采用状态价值或状态动作价值来进行动作估值,状态动作价值定义为
Qπ(S,A)=Eπ(Rt|St=s,At=a)。
(3)
式中:π代表智能体的参数化策略函数。
状态动作价值用于评估策略的好坏程度,引导Agent优化策略去获得最大的累积奖励。因而在基于值函数的方法中,价值评估的准确与否至关重要。
求解目标Q值主要采用贝尔曼等式:
Qπ(s,a)=r+γEπ(s′,a′)。
(4)
式中:s代表当前状态;a代表当前状态采取的动作;s′代表状态s下采取动作a后转移到的新状态;a′代表s′状态下采取的动作。
为了解决状态空间过大而导致的Q学习失效的问题,Allen等[6]、Nachum等[7]将卷积神经网络和Q学习结合起来,提出了深度Q网络(deep Q-network)算法。用参数θ表示神经网络的参数,并使用下式更新网络:
L(θ)=Es,a,r,s′[(yDQN-Q(s,a;θ))2];
(5)
yDQN=r+γmaxa′∈AQ(s′,a′;θ′)。
(6)
DQN算法主要有2个贡献,一是引入了经验回放机制,打破了采样数据之间的关联性;二是引入目标网络机制,稳定网络的更新。虽然DQN算法在当时表现优异,在多个游戏环境中甚至超越了人类玩家,但DQN算法因为更新估值时的最大化操作而造成了对真实Q值的高估,进而导致次优策略。
在基于值函数的方法中,价值估计上任何微小的变化都可能导致次优策略。Sutton等[20]提出了另一种强化学习算法——策略梯度方法,该方法通过输出一个动作概率的分布避免了上述问题,使得最优策略更加稳定。然而,随机策略的更新需要对状态空间和动作空间同时进行积分,会导致效率较低等问题,因此, Silver等[17]提出了确定性梯度策略算法,同时引入高斯噪声平衡探索和利用。相比随机策略梯度,确定性策略梯度训练所需的样本更少,收敛速度更快。
DDPG采用actor-critic框架,它包含一个参数化的策略函数π,其参数用φ表示,该函数通过将状态映射到确定的动作来表明当前的行动策略。估计器的参数用θ表示,π′、φ′、Q′、θ′ 分别描述目标行动者网络及其参数和目标估计器网络及其参数。
估计器的更新与Q-learning类似,使用贝尔曼等式更新:
L(θ)=Es,a,r,s′{[yDDPG-Q(s,a;θ)]2};
(7)
yDDPG=r+γQ′(s′,a′;θ′)。
(8)
策略网络的更新基于估计器参数θ,并通过梯度传播的链式规则进行更新:
(9)
式中:Q(s,a;θ)=Eπ(Rt|s,a)。
由于DDPG算法的估计器采取了与Q-learning相似的更新方法,因此也会产生与Q-learning相同的高估问题,进而导致次优策略的发生。
1.3 双延迟深度确定性策略梯度
双延迟深度确定性策略梯度(TD3)算法是对DDPG算法的改进[18]。TD3在DDPG的基础上引入了2个估计器网络,通过选取2个网络估值中的较小Q值更新估计器网络,达到降低高估影响的目的,即
(10)
TD3算法还加入了延迟更新的策略,在估计器网络更新d次之后更新一次行动者网络,在TD3算法中d的取值为2,本文中也使用此设定。尽管TD3算法缓解了估计器对Q值高估问题,但是所采取的最小化Q值操作又导致了估计的Q值低于真实值,这种低估将会导致次优策略。根据式(10),TD3算法的更新过程可以表示为

(11)
2 基于多估计器平均值的深度确定性策略梯度算法
本节针对TD3的低估问题,提出一种基于多估计器平均值的深度确定性策略梯度算法(DDPG-MME)。该算法在TD3的基础上增加了多个估计器网络来降低低估偏差和估计方差,可以在一定程度上提高算法的性能和稳定性。
2.1 DDPG-MME的Q值估计偏差
作为单个估计器的强化学习算法,DDPG会产生Q值高估偏差,而TD3算法中双估计器之间的最小化操作又带来了低估偏差。本文通过将这2种相反的估计偏差结合,实现更准确的Q值估计。具体而言,本文在TD3和DDPG的基础上,提出了DDPG-MME算法,该算法共使用k个估计器,通过对其中2个估计器输出的Q值之间的最小值和另外(k-2)个估计器输出Q值的平均值进行平均加权来获得目标,更新Q值,如下式所示:
yDDPG-MME=r+γ(Q′m+Q′n)/2。
(12)

Q′n={Q′3[s′,π(s′;φ′);θ′3]+Q′4[s′,π(s′;φ′);θ′4]+…+Q′k[s′,π(s′;φ′);θ′k]}/(k-2),并且Q′1,Q′2,…,Q′k之间相互独立。行动者网络参数φ的更新方式为
φJ(φ)=N-1∑aQθ1(s,a)|a=πφ(s)φπφ(s)。
(13)
估计器的目标网络参数的更新方式为

(14)
为分析DDPG-MME算法导致的Q值估计偏差,本文给出如下定理。

(15)

证毕。
根据定理1,可得DDPG-MME算法的估计偏差低于TD3算法,较低的估计偏差有助于提高算法稳定性,提升算法性能。
2.2 DDPG-MME算法的Q值估计偏差的方差
估计偏差的方差反映了偏差的波动程度,方差越小,估计Q值的波动程度越低,算法稳定性越高,进而可以得到更好的策略。
(16)
证明由已知条件可知,Z1,Z2,…,Zk独立同分布,则

证毕。
(17)
证明由已知条件可知,Z1、Z2独立同分布,则
证毕。
结合定理2和定理3的结论,可以得出,对于任意k(k>3):
(18)
即DDPG-MME算法的估计方差低于TD3算法的估计方差,这说明与TD3算法相比,DDPG-MME算法得到的估计值更加稳定。

(19)
这时DDPG-MME算法的估计偏差的方差仍低于TD3算法。
2.3 DDPG-MME算法
在TD3算法框架的基础上,引入k个独立的估计器,形成DDPG-MME算法的基本框架。DDPG-MME算法的输入为初始状态s,输出为行动a。首先,初始化k个估计器θ1,θ2,…,θk和1个行动者主网络的参数φ,并将(k+1)个网络的参数θ1,θ2,…,θk,φ复制到目标网络当中。其次,Agent 通过πφ(s)+ε,ε~N(0,σ)策略选择并执行相应动作a得到即时奖励r和下个状态s′,并将转移样本(s,a,r,s′)存储到经验回放池B中。在训练估计器和行动者网络时,从经验回放池B中抽取N个转移样本(s,a,r,s′),按照策略网络平滑正则化的方式a′←πφ′(s)+ε,ε~clip[N(0,σ′),-c,c]选取动作a′,并根据式(12)来计算目标Q值,随后根据θi←argminN-1·∑(yMME-DDPG-Qθi(s,a))2更新估计器网络参数。最后,根据延迟策略更新行动者网络参数和目标网络参数。
算法1基于多估计器平均值的深度确定性策略梯度算法(DDPG-MME)。
输入:观测状态s;
输出:行动a。
① 用随机参数θ1,θ2,…,θk,φ初始化k个估计器网络Qθ1,Qθ2,…,Qθk和1个Actor网络πφ;
② 初始化目标网络参数θ′1,θ′2,…,θ′k,φ′;
③ 初始化经验回放池B;
④ Fort=1 toTdo
⑤ 根据a~πφ(s)+ε,ε~N(0,σ)选择并执行行动a,得到奖励r和新的状态s′;
⑥ 将转移样本(s,a,r,s′)存储到B中;
⑦ 从B中抽取N个转移样本(s,a,r,s′);
⑧a′←πφ′(s)+ε,ε~clip(N(0,σ′),-c,c);
⑨ 根据式(12)计算目标Q值;
⑩ 对于i=1,2,…,k,更新Critic网络参数
θi←argminN-1∑[yMME-DDPG-Qθi(s,a)]2;
3 实验结果及分析
本节主要介绍评估DDPG-MME算法性能所用的实验环境、实验设置、实验结果及分析。
3.1 实验环境
为了评估DDPG-MME算法,本文在OpenAI开发的Gym平台上测量了算法的性能,所用的实验环境为4个MuJoCo连续控制任务环境。
3.2 实验设置
本文在4个MuJoCo连续控制环境中对DDPG-MME、DDPG和TD3算法进行对比。实验中每个算法用10个随机种子运行,并且每5 000个时间步长评估10次算法性能。在每个实验环境下,本文都进行了106步长的训练,为了获得更好的经验,消除对初始参数的依赖,本文在前10 000步长中采用纯探索策略。DDPG-MME算法的基本网络架构和TD3算法的相似,均采用两层全连接神经网络,分别由400个和300个隐藏节点组成。在每一层之间都有Relu激活函数,最后一层采用tanh单元输出动作。
由于DDPG-MME算法中估计器的个数k设置为4时,算法估计偏差的方差已经小于TD3算法,并且此时算力的需求最小,因此本文在对比实验中使用了k=4的设置,其余超参数(奖励函数、环境参数、批次大小、学习率、优化器、折扣系数)均与TD3算法的参数一致。为了最小化Bellman损失,网络使用Adam优化器进行更新。此外,每次更新网络时,都选取一批数量为100的样本来训练网络参数,实验中学习率设定为10-3。
通过在目标动作网络添加正则项ε~clip(N(0,0.2),-0.5,0.5)平滑动作的输出,并加入延迟更新机制,每当估计器网络更新d步(本文中d设置为2)之后,更新1次行动者网络。估计器和行动者网络参数通过软更新来进行更新,软更新参数τ=0.005 。
3.3 实验结果分析
本文在Reacher-v2、HalfCheetah-v2、Inverted-Pendulum-v2、InvertedDoublePendulum-v2中对比了DDPG-MME、DDPG和TD3算法的表现。
图1展示了DDPG-MME、DDPG和TD3算法在不同训练次数后的平均得分,其中,实线部分代表10次评估的平均得分,实线的高低程度反映了算法性能的优劣,阴影部分代表标准差的一半,阴影范围越大,算法稳定性越差。由图1可得,在4种不同的环境中,在经历了大约20 000步长之后DDPG-MME的得分便开始逐步高于TD3和DDPG算法,并在最终的平均得分上超越上述2种算法。
图1表明DDPG-MME在缓解TD3的低估问题后,获得了更优的策略和更高的分数,体现了DDPG-MME算法的优越性。此外,图1也表明TD3算法在引入目标策略平滑和软更新后,算法的稳定性得到了提升,估计方差得到了较好的控制。在TD3算法的基础上,DDPG-MME算法的平均加权方法也使得算法的稳定性进一步得到提升。
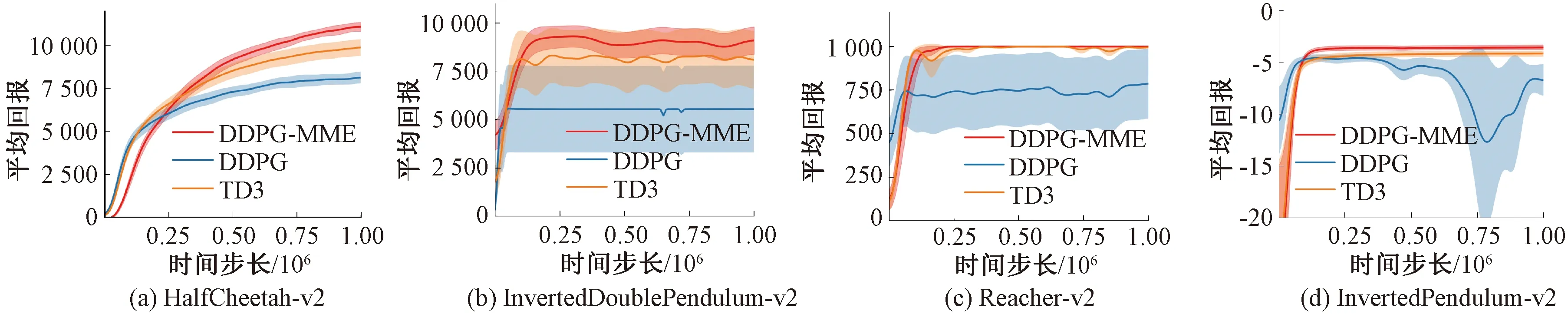
图1 MuJoCo环境下4种实验学习曲线Figure 1 Learning curves for four experiments in the MuJoCo control environment
表1对比了3种算法在4个MuJoCo连续控制环境下106个时间步长的10次试验中的最大平均回报。从表2可以得出,采取了平均加权操作后的DDPG-MME算法比TD3算法和DDPG算法具有更好的性能和稳定性。

表1 DDPG-MME、TD3、DDPG算法的最大平均回报对比Table 1 Comparison of the maximum average returns of the DDPG-MME,TD3,DDPG algorithms
4 结论
为了对Q值的估计更加准确,本文提出了一种基于多估计器平均值的深度确定性策略梯度(DDPG-MME)算法。该算法通过平均加权的方式缓解了TD3算法的低估问题,提高了算法性能,结论如下:
(1)DDPG-MME算法在一定程度上缓解了TD3算法存在的低估问题;
(2)从理论上分析了DDPG-MME算法和TD3算法估值的偏差和方差,证明DDPG-MME算法Q值估计的偏差低于TD3算法,并且DDPG-MME算法Q值估计偏差的方差低于TD3算法;
(3)在4个MuJoCo连续控制环境中对DDPG-MME、TD3以及DDPG算法的性能和稳定性进行对比,验证了DDPG-MME算法的优越性。
猜你喜欢
社会科学战线(2022年7期)2022-08-26
九江学院学报(自然科学版)(2022年2期)2022-07-02
社会科学战线(2022年3期)2022-06-15
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
福建基础教育研究(2019年3期)2019-05-28
西部资源(2018年1期)2018-11-01
初中生世界·九年级(2017年10期)2017-11-08
小资CHIC!ELEGANCE(2016年28期)2016-12-16
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
中学生数理化·八年级数学人教版(2016年5期)2016-08-23