经颅磁刺激定位技术的研究进展
2022-03-04 10:06尧利书孙聪葛康蔡胜安
中国医疗设备 2022年2期
尧利书,孙聪,葛康,蔡胜安
1. 武汉依瑞德医疗设备新技术有限公司,湖北 武汉 430000;2. 武汉资联虹康科技股份有限公司,湖北 武汉 430000
引言
经颅磁刺激(Transcranial Magnetic Stimulation,TMS)技术是一种利用时变的脉冲磁场作用于中枢神经系统(主要是大脑),在脑内诱导产生感应电流,改变皮质神经元膜电位,从而引起一系列生理生化反应的神经调控技术。自1985年Barker等首次报道利用TMS刺激初级运动皮质(M1区)引出了运动诱发电位(Motor Evoked Potential,MEP)[1],至今已有三十多年。因其无痛、无损、 操作简便、安全有效等特点,逐渐被临床所接受。重复性经颅磁刺激(repetitive Transcranial Magnetic Stimulation,rTMS)被广泛应用于各种神经精神疾病的治疗。
TMS主要产生作用的磁场是由TMS刺激线圈发出,迄今已报道的TMS刺激线圈有几十种,但临床常用的有两种:圆形线圈和8字形线圈[2]。圆形线圈刺激面大,易引出MEP,也适用于外周神经刺激;8字形线圈是在一个平面上将两个圆形线圈边靠边放置,两个小圆线圈产生的磁场在中间产生叠加,聚焦性好,刺激面积小,刺激深度比较浅,一般用于定位要求比较严格的科研和功能区制图,也可以用于治疗,但刺激强度比较小[3]。
TMS刺激线圈是产生磁场的装置,对皮质的刺激强度与刺激线圈同皮质之间的距离呈反比,即皮质能感受到的磁场强度随刺激线圈的远离呈指数式衰减。刺激线圈相对于头部的角度也会严重影响皮质接收到的磁场强度[4]。在很多研究报道中,伪刺激对照均采用旋转刺激线圈90°进行设置,如Jansen等[5]在研究高频rTMS对酒精使用障碍者和健康对照者情绪处理、再评价和渴求的影响中,刺激右侧前额叶背外侧区(Dorsolateral Prefrontal Cortex,DLPFC),使用相同的参数进行伪刺激,但rTMS线圈相对于颅骨倾斜90°。Khedr等[6]研究rTMS对帕金森病被试吞咽困难的治疗作用,其中伪刺激组使用相同的参数进行假rTMS,但使线圈边缘与头部保持垂直,而其余部分在矢状面上旋转90°远离头皮,以再现刺激的噪音。Kakuda等[7]在研究卒中后上肢偏瘫的被试中,伪刺激组使线圈与头皮呈90°。所以,在工作时,刺激线圈需与头皮相贴并与大脑皮质保持合适的角度,才能有效在大脑皮质内诱导出感应电流产生生物学效应。
一个rTMS治疗方案应包括刺激频率、刺激时间、刺激间歇、脉冲总数和治疗部位,其中刺激频率、刺激时间、刺激间歇、脉冲总数都可以通过数字量化来进行规范和标准化,而刺激部位依照目前临床常用的定位方法,具有一定的主观性且难以实现精准的靶点定位和精准的二次重复定位;另外,患者在20 min左右的治疗过程中往往会因咳嗽、喷嚏、疲劳等外在因素出现头部移动导致靶点脱位。而许多研究表明,刺激线圈偏移靶点5 mm以上,就可能无法起到有效的治疗作用[8-9],因此靶点脱位将会大大降低rTMS对患者治疗的有效性。因为这些因素的存在,国内部分学者的研究中因没有配备可以实现精准定位的导航或机器人,在向SCI收录杂志投递TMS研究论文时被杂志社拒稿。另外,靶点定位不准,也难以让TMS技术在临床上规范化,严重限制该项技术的发展。常见刺激线圈的磁场分布图如图1所示。
TMS定位技术随着科技的发展,一直在不断地优化,本文对每一种TMS定位方法做详细分析。
1 脑功能区定位
功能区定位适用于对功能明确、易于检测到靶区刺激效果的皮质进行定位,如刺激M1区,在上下肢、面部很容易看到靶肌的抽动或者在靶肌上记录到相应的MEP,还有在视觉皮质刺激出现光幻觉,刺激Broca区出现语言停顿等。这种方法容易个体化,简单易行,只要对脑功能分区有大致了解就可实施,但对刺激效应不明显的脑区,如对主要负责情绪、记忆功能的前额叶就不适用,因为情绪无法通过单次刺激做出明显改变。
1985年,Barker等[10]手持刺激线圈,在没有定位辅助工具的情况下进行了TMS(图2),确定原始运动皮质(M1区)手控制区为靶点的定位方法可能就是脑功能区定位法。这种定位方法Amassian等[11]和Pascual-Leone等[12]均在TMS研究中应用过。

图2 Barker在演示TMS
除了有些脑区不适用的缺点外,由于此法需要手持刺激线圈或用固定支架固定刺激线圈,无法准确感知每次刺激线圈与头皮的贴合度和角度,因此也无法实现后续治疗与前一次治疗的精准重复,也无法解决治疗中靶点偏移的问题。
2 解剖学定位
大脑的结构是所有一切脑科学的基础,历年来研究的人也很多。在TMS 研究中利用参照国际脑电10-20系统的解剖学定位法,根据大脑的常模确定大概的解剖结构及位置,此法依赖操作者对大脑解剖知识的熟练掌握,是一种非个体化的定位方法。F3和F4分别对应左右DLPFC(图3)。
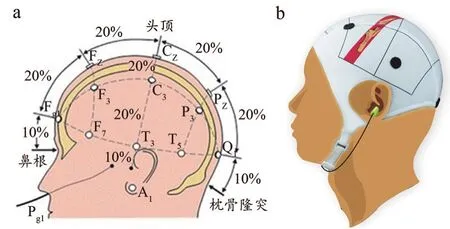
图3 国际脑电10-20系统和TMS定位帽
Lin等[13]在研究慢性rTMS对戒毒男性住院被试睡眠质量和情绪状态的影响中,确定刺激靶点左侧DLPFC就是参照国际EEG 10-20系统中的F3。
该法简单易学易用,国内各大经颅磁刺激仪的生产厂商,也多研发并注册了依照国际脑电10-20系统的TMS定位帽,方便经济,深受临床初学者的喜爱。但该方法也受操作者对解剖知识的了解度和定位帽佩戴正确与否的影响,而且个体的头部大小存在10%~20%的差异。Herwig等[14]通过影像学研究发现,依照脑电10-20系统定位的方法有20 mm的定位误差,由此可见依照国际脑电10-20系统原理设计的TMS定位帽在指导TMS定位时肯定存在一定误差。
与第一种定位方法一样,需要手持刺激线圈或用固定支架固定刺激线圈,无法准确感知每次刺激线圈与头皮的贴合度和角度,所以无法实现后续治疗与前一次治疗的精准重复,也无法解决治疗中靶点偏移的问题。
3 脑功能区及解剖学定位相结合
DLPFC是精神科治疗许多疾病的常选刺激部位,1996年,Pascual-Leone等[12]在TMS研究中应用了“5 cm法则”,通过M1区向前移动5 cm来确定DLPFC。临床上多用脑功能区定位法确定M1区手控制皮质,然后通过向前平移5 cm来定位DLPFC(图4)。由于每个人头颅大小不同,没有考虑每个人解剖和功能变异的因素,精准度不高,是一种非个体化定位方法。
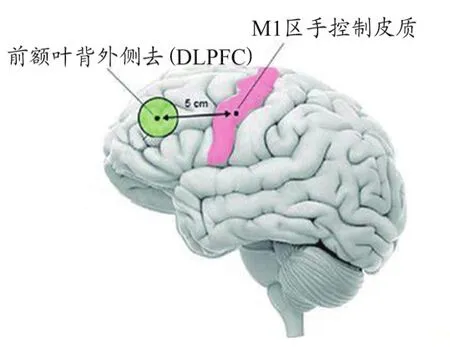
图4 5 cm法则
4 随动支架
为了解决TMS治疗过程中易脱靶的难题,有设备商在已有固定支架的基础上研发出随动支架。随动支架同固定支架一样,通过三轴一体化的机械臂,可实现180°全方位定位(图5),另外在支架底座进行了滑轨设计,当刺激线圈固定在头部后,被刺激者的头、头枕、刺激线圈、支架相对保持固定,一旦头部发生左右偏移,头枕、刺激线圈、支架可随头部移动,确保头动过程中,头、刺激线圈、支架始终联动,实现跟随不脱靶。

图5 武汉依瑞德研发的随动支架
随动支架可以小幅度解决沿患者头部纵轴为轴心的左右旋转,为临床治疗提供了一定的便利。但患者头部移动是多轴向的,随动支架因其设计目的和原理的限制,不能实现患者头部多轴向的随动,不太符合患者的实际应用场景,而且由于磁场和头部的接触部位是球面的,当刺激线圈相对于刺激靶点产生移动时,磁场在头部体表的误差映射在大脑皮质会放大,这样就更无法保证治疗过程中有效的磁刺激,由于敏感性不够,该法只能解决治疗过程中粗略的靶点跟随(图6)。
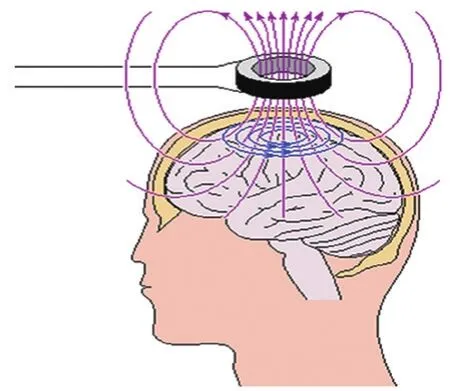
图6 刺激线圈诱发的感应磁场图
而且随动支架只考虑了跟随的问题,首次靶点定位方法还需依靠前面提到的脑功能区或解剖学定位,无法从根本上满足精准定位的需求,二次治疗时需要操作者手动将刺激线圈放置到靶点,因此也无法保证二次重复定位的准确性,因此随动支架并不能满足TMS精准定位的需求。
5 导航TMS
上述所有定位方法都无法保证每次的刺激部位是准确的和精准重复的,因为大脑皮质被头皮、颅骨覆盖,整个皮质刺激过程是一种“盲态”。
为了解决“盲态”问题,早期就诞生了一种“可视化”的大脑皮质定位装置,这种装置初期用于外科手术,后来被引入TMS领域,这种技术被称为导航经颅磁刺激(navigated Transcranial Magnetic Stimulation,nTMS)。该装置可以导入个体的MRI数据,重建3D头模,再采用红外光学摄像头和导光追踪装置,通过人工操作将现实脑和3D头模进行匹配,将现实脑的空间位置转换到“可视化”的3D头模软件上,这样就实现了TMS首次精准定位的需求,并且对刺激线圈与头皮的距离和角度有了严格控制,定位准确性得以大幅提升。光学导航装置软件中可视刺激线圈与皮质的空间位置如图7所示。
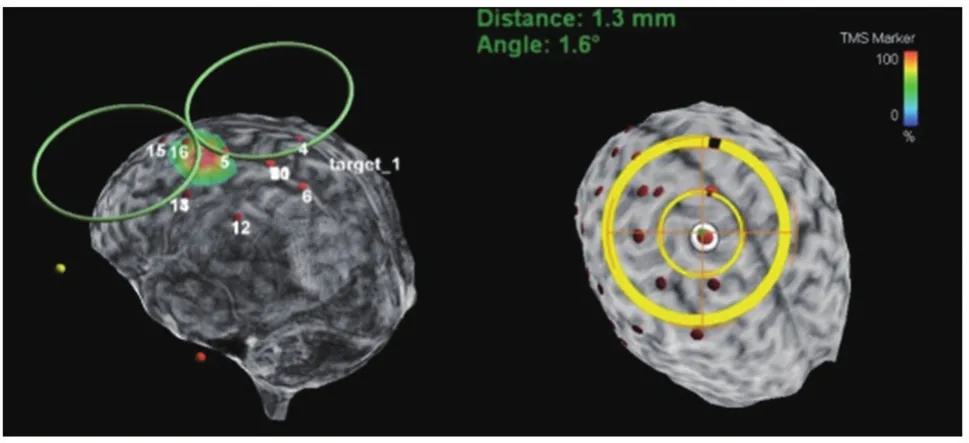
图7 光学导航装置软件中可视刺激线圈与皮质的空间位置
Lioumis等[15]通过nTMS对语言相关的脑区进行绘制,为研究提供了精准的定位,认为nTMS是一种减少TMS定位误差的方法。Frey等[16]认为,利用nTMS对运动皮质脑肿瘤患者进行精准定位,可扩大手术适应证和切除范围,使更多的患者接受手术,并可使脑肿瘤患者的神经预后更好、生存率更高 。Tarapore等[17]通过对比直接皮质刺激、nTMS、脑磁图定位三种方法对M1区肿瘤患者的精准性,结果发现nTMS与直接皮质刺激、脑磁图的结果有很好的相关性,认为nTMS是一种很好的术前定位方法。Dell’Osso等[18]认为,低频刺激右侧DLPFC的nTMS治疗双相抑郁症可获得较好的疗效。
但这种方法全程需要手持刺激线圈,而且每次使用都需佩戴导光追踪装置和重新标定,过程繁琐耗时。如果想实现精准治疗,在整个rTMS实施过程中(平均约15~30 min),需操作者手持刺激线圈一动不动地站在被刺激者旁边固定刺激线圈,如果受试者头部移动,需暂停治疗,重新手动调整定位,保持刺激靶点的参数与前面一致。由于这种定位方法耗时、费力、低效而且操作繁琐,不适用于临床治疗,但受到科研工作者的支持,因为至少可以实现首次精准TMS和二次精准重复。
6 机器人TMS
由于用手握住线圈进行长达30 min的治疗是一项耗尽体力的任务,因此通常在定位后,利用刚性夹持器或机械臂将TMS线圈保持不动[19]。这样,线圈在刺激期间可稳定地保持其位置。然而,若患者头部发生移动,刺激点会相应发生改变。最简单、最常用的方法是要求患者在保持与线圈接触的同时尽可能保持头部不动。另一种解决方案是使用头枕框架,患者将下巴放入模具中,并将前额压在框架上[19-20],目的是维持头部稳定[21],这种硬性头部固定,可以将头部运动降到最低[22]。然而,这些方式并不是TMS定位的完美解决方案,因为这会导致被刺激者严重的不适,接受度不高。
改进手持线圈的方式,使用机器人辅助TMS线圈定位的方法对于TMS的临床应用具有重要意义[23]。机器人辅助TMS系统结合了神经导航技术和自动化技术的优势,可以实现精准高效的刺激[24-25]。
随着人工智能技术的发展,智能机械臂(或称机器人)逐渐被引入TMS定位领域,机器人直接将磁刺激线圈自动推送到患者的头部靶点[26],并让刺激线圈与颅骨保持相切的状态[27]。
通过指令控制,机械臂会快速、精细地执行命令,可提供精准、智能的TMS定位,这种技术被称为机器人TMS[28],可实现机器人TMS的代表性技术路线有两种:
第一种机器人:是在上述可实现nTMS的光学导航产品基础上,增加智能机械臂,用机械臂代替人工握持刺激线圈,让刺激线圈能在治疗过程中出现靶点偏移时实时智能跟随,确保治疗中不脱靶。但这种基于红外光学引导的技术路线,由于首次定位的靶点仍需人工寻找确定,对操作者解剖专业知识要求极高;另外重建的3D头模与现实脑的匹配也需要繁琐的操作流程,大大降低了工作效率,使其在临床中的使用严重受限。首次定位需人工确定靶点的红外光学导航机器人如图8所示。
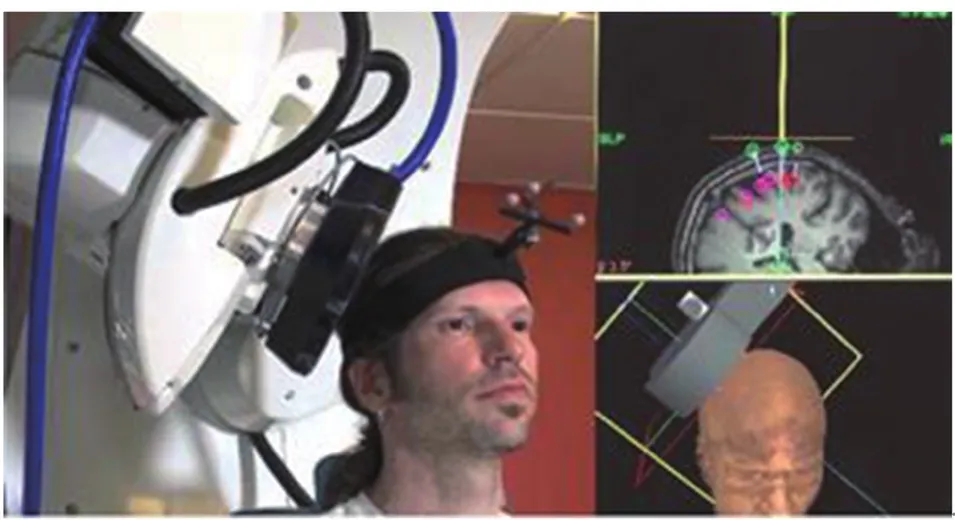
图8 首次定位需人工确定靶点的红外光学导航机器人
第二种机器人:武汉依瑞德公司联合武汉资联虹康公司研发的基于机器视觉识别技术的阿米TMS机器人定位系统(图9),充分整合个体的头面部信息、大脑头皮外形、被试个体化的MRI数据等三方面的定量信息,并结合刺激靶点与刺激线圈表面中心锁定的距离和角度,除了可实现“可视化”、智能跟随刺激,该系统还可实现智能确定靶点,无需操作者手动探索确定靶点,降低了操作者对解剖知识的要求和探索靶点时的操作误差;还可以通过点云扫描技术智能地将现实脑与重建的3D头模之间进行快速准确的匹配,而红外光学导航和第一种机器人都需要人工匹配,容易造成操作误差。该款机器人的智能化程度、工作效率和便捷性较第一种机器人有明显提高,为精准化、智能化TMS的实现提供了可行性,为科研成果的可信度和科学性提供了保障,为临床应用实现机器人TMS创造了硬性条件。

图9 基于机器视觉识别技术的阿米TMS机器人定位系统应用场景图
王贺等[29]认为机器人经颅磁刺激可以解决手持线圈方法存在的精确性和复杂性问题,并提出了一种用于TMS机器人导航路径规划与避障的算法,为后续实现TMS辅助机器人系统的自动控制奠定了基础。Zorn等[30]将头部运动补偿与力控制相结合,认为机器人可以保证TMS过程中的锁定靶点的准确性和治疗的安全性。Ginhoux等[31]在刺激运动皮质实施检测时,分别利用机器人系统自动定位与光学导航系统手动定位,从舒适性、疲劳感、压力水平以及产品易用性等方面评估两种定位方法中刺激的准确性、可重复性以及系统操作员和被刺激者的感受,结果发现机器人定位系统可以明显提升定位精度和可重复性,而且操作员更省心,被刺激者感受更好。
Richter等[32]对比了不同场景下(两种定位方法:① 线圈支架;② 机器人中的三种场景:a.保持头部不动;b.使用头枕;c.让头部自由可动)靶点皮质感应电场的情况,结果发现使用固定头部的方法使得靶点皮质的感应电场出现显著偏差(30 min rTMS后1a和1b靶点皮质感应电场分别降低了32.0%和19.7%),而机器人定位方法的运动补偿(跟随)可以有效抵消这种偏差(2a、2b和2c分布仅降低4.9%、1.4%和2.0%)。Goetz等[33]通过21例受试者共79次重复经颅磁刺激发现,机器人可以保证TMS刺激线圈距离误差控制在1.34 mm,角度误差在3.48°,认为机器人可以在rTMS中长时间保持刺激线圈精准、稳定地定位。
机器人TMS技术明显提高了TMS的定位精度,确保了刺激线圈定位的可重复性,通过自动操控技术大大解放了操作师的双手,提高了工作效率,也为TMS技术的科学研究提供了更科学、更客观的手段。
7 展望
TMS定位技术的发展为TMS技术的临床应用带来了便利,提高了工作效率,使得TMS技术的应用更加规范化和科学化。但目前这些定位均只是在解剖学层面上实现精准,而大脑皮质出现损伤后会出现各种功能代偿和失代偿,神经网络功能也会发生变化,除了解剖学定位精准外,未来能否联合功能性脑检测技术,在功能层面实现更加精准化、个体化的TMS,是值得思考的方向。
此外,随着人工智能技术发展,数据网络化、大数据的利用,TMS技术的应用也将朝着个性化、智慧化方向发展。
猜你喜欢
中老年保健(2021年3期)2021-12-03
汽车零部件(2021年9期)2021-09-29
天津医科大学学报(2021年4期)2021-08-21
小资CHIC!ELEGANCE(2021年46期)2021-01-11
军事文摘(2020年22期)2021-01-04
中国生殖健康(2020年7期)2020-12-10
睿士(2020年11期)2020-11-16
VOGUE服饰与美容(2020年9期)2020-09-02
医学研究杂志(2015年7期)2015-06-22
同位素(2014年2期)2014-04-16