接地线用快速夹轨装置研究
2022-03-03 07:34史永革李奕超
电气化铁道 2022年1期
史永革,安 涛,李 辉,李奕超,王 浩
0 引言
在接触网检修作业中,挂接地线是被广泛使用的末端防护方式,按照相关规定[1],接地线接地端应通过专用线夹(接地靴)与钢轨牢固可靠连接,且连接前需用钢刷打磨钢轨与线夹连接处表面以去除污垢,连接后接地电阻应符合安全规定。
1 接地靴存在的问题
目前,接地线接地端专用线夹(接地靴)采用梯形螺纹紧固方式与钢轨连接,夹紧接触面为钢轨一侧轨底及轨底上部两侧斜面端头。从接地靴结构(图1)上看,其总成由固定杆件、移动套筒组件、螺母、垫片组成,其中固定杆件呈“L”形(L形螺杆),横截面为圆形,水平段一侧有外螺纹,移动套筒组件呈反“L”形,二者之间的开合通过套筒后部的紧固螺母在固定杆件上左右旋进、旋退实现。由于不同型号轨底上部斜面斜度存在差异,造成实际夹紧接触位置存在差异。

图1 接地靴总成结构
在现场应用中,接地靴暴露出以下问题:夹紧、松卸钢轨时无效作业时间长,见图2。受结构影响,只有当L形螺杆上端A点和移动组件反“L”上端B点之间间距达到或略小于轨底宽度时,线夹才能从下向上水平或斜向包容住钢轨,且夹紧过程中移动组件无效夹紧移动距离过长。而松卸钢轨时,操作顺序相反,移动组件无效移动距离过长的情况同样存在,从而产生了较长无效作业时间。

图2 接地靴A点和B点间距变化范围
2 研究目的及途径
针对接地靴夹紧、松卸钢轨时无效作业时间长的问题,设想通过改变夹轨接触面位置,设计新型夹轨装置,以实现快速夹轨目的。
在钢轨横截面上,各型钢轨轨底两侧均为竖直面,其高度各型钢轨不同,但均在10 mm以上,因此可以考虑将其与轨底面共同作为夹轨接触面。各型钢轨横截面见图3,其中各型轨底宽度尺寸极限偏差均为-1.5~1.0 mm[2]。
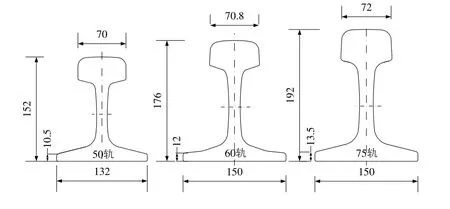
图3 各型钢轨横截面(单位:mm)
3 快速夹轨装置设计
以各型钢轨轨底两侧竖直面和轨底面作为夹轨接触面,利用圆偏心式凸轮和棘轮机构所具备的短行程、连续往复等快速特性,分别设计新型夹轨装置。
3.1 圆偏心式凸轮快速夹紧装置设计
圆偏心式凸轮(以下简称凸轮)快速夹轨装置结构见图4。

图4 圆偏心式凸轮快速夹轨装置结构
图4中,凸轮快速夹轨装置总成由挡块、底板、顶杆座、凸轮座等部件通过焊接连接组成。装置通过固定挡块和移动顶杆实现夹轨功能,顶杆由凸轮快速推动并实现夹紧后自锁。由于凸轮偏心量小,顶杆移动距离有限,仅能实现对轨底宽度相同的不同型号钢轨夹紧,即该凸轮快速夹紧装置根据顶杆长度的不同可分为50型和60(75)型,分别适用于50轨、60(75)轨。图中磁铁的功能是在夹紧前可使装置快速吸合在轨底定位,方便单手操作凸轮手柄实现快速夹紧。
3.1.1 夹紧力计算模型
圆偏心夹紧实质是一种曲线形楔块夹紧,计算凸轮的夹轨力时,假设凸轮的工作情况与直线形楔块夹紧相似,便可计算出夹轨力大小。这种假设的计算方法是一种近似算法,但其精度已足够满足实际应用要求[3]。
计算模型见图5。凸轮夹紧顶杆时,凸轮体受力包括手柄上的作用力Q、转轴处反作用力R1以及顶杆反作用力R2。P点为夹紧顶杆作用点。
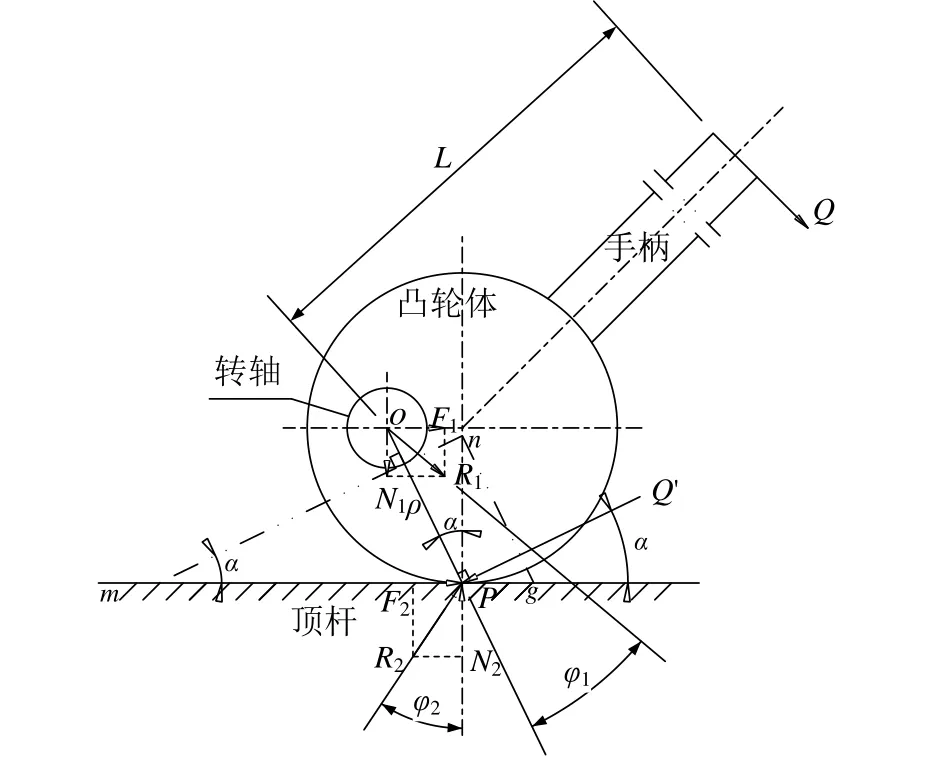
图5 夹紧力计算模型
图中Δmng为一假想楔块,楔块受力包括转轴处反作用力R1、顶杆反作用力R2以及Q′。Q′为作用在假想楔块上的外力,由手柄上的作用力Q产生。手柄上的作用力Q对转轴中心O点产生的力矩为Q·L,由O点将该作用力传至P点,力矩为Q′·ρ(|OP| =ρ),两力矩平衡,即

对于假想楔块,由水平方向静力平衡可得

因自锁时的α很小,所以cosα≈1,则

另由垂直方向静力平衡可得

因自锁时的α很小,所以sinα≈0,则N1与N2大小相等,方向相反。则

式中:L为手柄的长度,mm,设计取160 mm;Q为作用于手柄上的力,N,设计取150 N;N1为转轴处反作用力R1的垂直方向分力、N2为顶杆反作用力R2的垂直方向分力;ρ为回转中心O距夹紧点P的距离,即回转半径,mm;α为凸轮夹紧点P的升角,°;φ1为凸轮体对转轴的摩擦角,通常φ1= 5°43′(此时tanφ1= 0.1);φ2为凸轮体对顶杆表面的摩擦角,通常φ2= 8°30′(此时tanφ2= 0.15)。
3.1.2 夹紧力计算
在夹紧过程中,随着手柄转动,凸轮上的夹紧点P是变化的,因此α、ρ也是变化的。但在实际使用中,通常取图5中所示P点位置左右夹角30°~45°的对称部分为工作部分,因为这一段α变化小,夹紧力较稳定,同时行程较大,适用于需要自锁的夹紧范围较大而夹紧力相对较小的场合,可以满足钢轨轨底宽度存在尺寸偏差的实际工况。
当取图5中所示P点左右夹角30°~45°的对称部分作为工作部分时,相当于凸轮的工作角度β为60°~90°。凸轮的工作角度β见图6,图中夹紧行程S=esinβ。

图6 凸轮夹紧工作角度β范围示意
当凸轮的工作角度β= 60°时:

式中:e为偏心距,mm,根据轨底宽度尺寸极限偏差,设计取2.5 mm;D为圆偏心凸轮直径,mm,根据自锁条件D≥(14~20)·e,设计取D= 20e,即50 mm。
将数据代入式(4)~式(6),得α= 2.635°,ρ= 27.19 mm,N2= 2974 N。
同理,当β= 90°时,计算得α= 0°,ρ= 27.5mm,N2= 3491 N,此时夹紧行程S= 2.5 mm。
3.2 棘轮(齿轮)式快速夹紧装置设计
3.2.1 装置结构
棘轮(齿轮)式快速夹紧装置结构如图7所示。
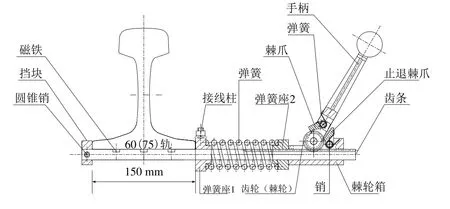
图7 棘轮(齿轮)式快速夹轨装置结构
棘轮(齿轮)式快速夹紧装置总成由固定挡块、矩形齿条、弹簧座、压缩弹簧、齿轮(棘轮)、棘轮箱等部件组成。装置通过固定挡块和移动弹簧座1实现夹轨功能。夹轨时,手柄向左推动,棘爪推动齿轮(棘轮)转动一个齿,由于齿轮齿条啮合关系,带动棘轮箱沿固定齿条向左移动一个齿距,棘轮箱推动弹簧座2压缩弹簧,弹簧发生变形后再将力传递给弹簧座1,至此完成一个齿距夹紧位移。此后,在止退棘爪的作用下,手柄可快速返回初始位置,即可进行下一次夹紧位移。如此循环反复,最终完成夹轨作业。松卸钢轨时,手柄向右推动,压住止退棘爪,在弹簧回复力作用下即可快速完成卸载作业。图中压缩弹簧的主要功用相当于无极调节单元,可确保任一小于单个齿距夹紧位移的实现。磁铁的功能是在夹紧前可将装置快速吸合在轨底定位,方便单手操作棘轮手柄实现快速往复夹紧。
该装置可适用于50轨、60(75)轨的快速夹紧,60(75)轨夹紧后状态见图7。图中棘轮(齿轮)设计参数:模数m= 1.75 mm,齿数z= 18,齿宽b= 25 mm,分度圆直径d齿= 31.5 mm,材料为20CrMnTi,渗碳淬火,齿面HRC57~HRC62,齿心HRC30~HRC45。
假定作用于手柄上的最大推力P= 300 N(估计值),作用力臂L= 180 mm,则产生的最大力矩为54 N·m,根据力矩平衡,齿轮承受的最大力矩Tmax= 54 N·m,则齿轮轮齿承受最大啮合力3429 N,为便于计算取3500 N。
3.2.2 压缩弹簧设计
钢轨夹紧力由压缩弹簧变形后产生,齿轮、齿条之间的啮合力通过棘轮箱传递给弹簧座2,弹簧座2移动后压缩弹簧,因此,弹簧轴向压缩力等于齿轮齿条之间的啮合力。压缩弹簧结构及其负载-变形(F-λ)特性关系见图8。
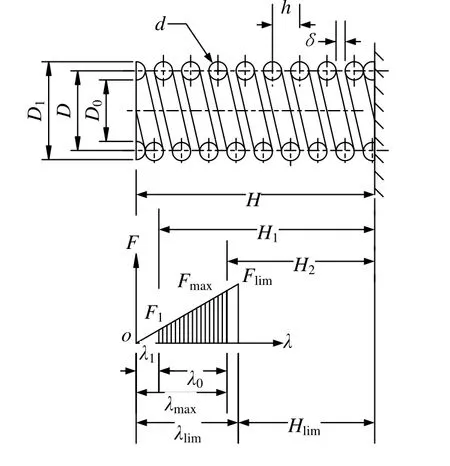
图8 压缩弹簧结构及其F-λ特性关系
图8中,D1、D、D0分别为压缩弹簧的外、中、内径,d为弹簧丝直径,h为弹簧节距,δ为弹簧圈间隙。压缩弹簧F-λ特性关系为一斜直线。当负载为零时,弹簧自由长度为H,F1为最小工作负载,在最小载荷下,弹簧的长度为H1,弹簧的压缩量为λ1。Fmax为最大工作负载,此时,弹簧的压缩量为λmax,长度降至H2,工作行程λ0=λmax-λ1=H1-H2。Flim为工作极限负载,即在Flim作用下弹簧丝内的应力达到了弹簧材料的屈服极限,此时,弹簧的压缩量为λlim,长度降至Hlim。通常,Fmax≤0.8Flim。
根据使用工况,该弹簧受力循环次数N不高(N<103),无冲击载荷,属于第Ⅲ类弹簧,选用弹簧材料为Ⅱa组碳素弹簧钢丝65Si2MnWA。
设计输入条件:F1= 0,λ1= 0;Fmax=F齿max= 3500 N,λmax= 25 mm。压缩弹簧设计计算过程见表1。

表1 压缩弹簧设计计算
经过计算,弹簧结构参数确定为:弹簧丝直径8 mm,外、中、内径分别为43、35、27 mm,有效圈数7,总圈数9,两端磨平。弹簧自由状态下长度115 mm,节距13 mm,弹簧展开长度996.5 mm,右旋,热处理后硬度HRC40。
3.2.3 棘轮(齿轮)齿根弯曲强度校核 校核计算过程见表2。
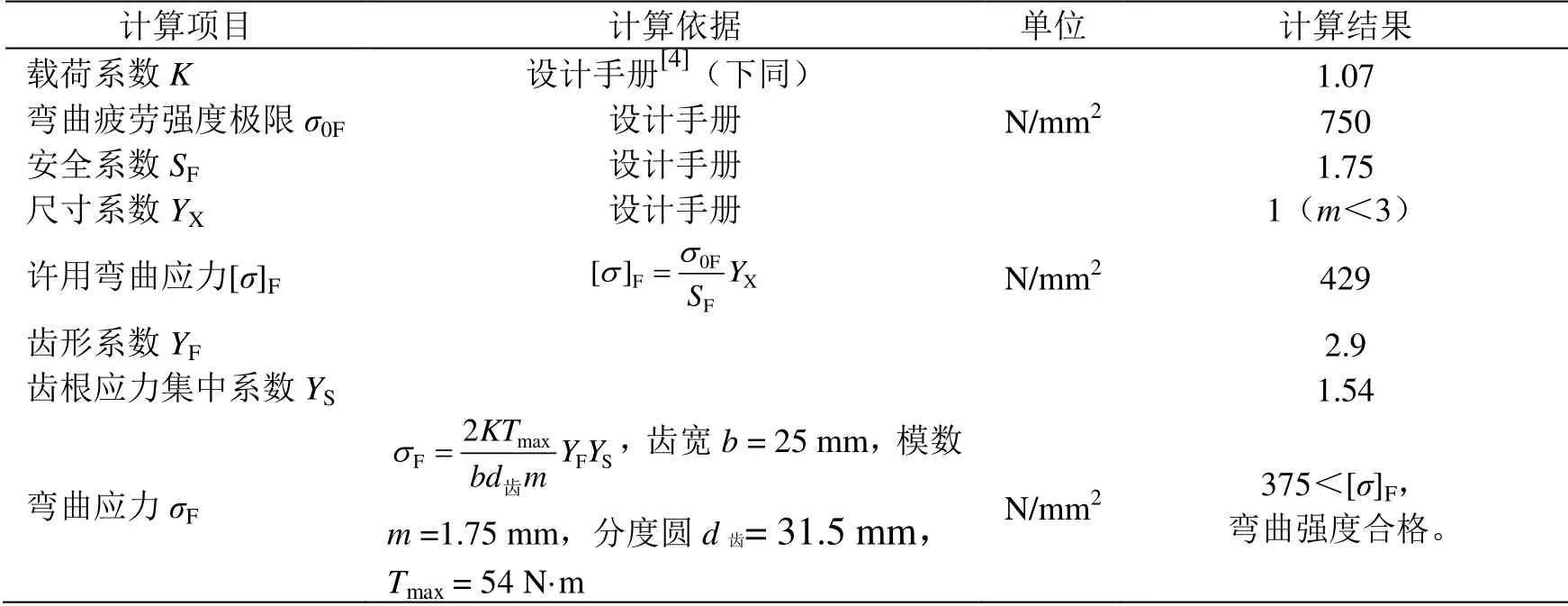
表2 棘轮(齿轮)齿根弯曲强度校核计算
结论:棘轮(齿轮)齿根弯曲强度可满足最大力矩时的工况需求。
4 凸轮式、棘轮(齿轮)式夹紧装置综合性能对比
凸轮式、棘轮(齿轮)式夹紧装置综合性能对比见表3。二者综合性能各有长短,但都具备了快速夹轨功能。棘轮(齿轮)式通用性强,适用于各型号钢轨,夹紧后稳定性高;凸轮式通用性差,但简单轻便,外界环境振动因素对夹紧后自锁稳定性有一定影响。

表3 凸轮式、棘轮(齿轮)式夹紧装置综合性能对比
5 结论
通过样机试制及现场试用表明,通过改变夹轨接触面位置从而实现快速夹轨目的的设计思路是可行的,据此设计的两种快速夹轨装置经现场试用均可满足接触网检修作业中接地线接地端快速夹轨需求。在实际检修运用中,可根据接触网检修区段钢轨的型号,灵活配置这两种快速夹轨装置。
猜你喜欢
学苑创造·B版(2022年4期)2022-06-19
科学家(2021年24期)2021-04-25
科技视界(2018年21期)2018-12-10
文艺生活·中旬刊(2017年4期)2017-05-25
消费电子(2017年4期)2017-05-04
小学阅读指南·高年级版(2016年1期)2016-09-10
建筑工程技术与设计(2015年26期)2015-10-21
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
中小企业管理与科技·中旬刊(2014年8期)2014-09-22