
自动循迹跟随智能小车设计
2022-03-02 05:30许皓博
数字通信世界 2022年1期
许皓博
(福建警察学院,福建 南平 353600)
1 智能循迹小车系统整体方案设计
1.1 整体实现方案
小车电源由两个500 mA充电锂电池串联在一起,输出电压约为3.7 V,STM32单片机是整个小车的主控制器,依据自身内部装有减速齿轮组这个部件,所以可以实现调速的功能。DC电机用的是TB6612驱动芯片,TB6612芯片工作方式是改变芯片内部控制端的输入电平实现对电机正反转即停止等步骤,从而实现对电机减速功能。TB6612驱动芯片操作方便且稳定性好。利用超声波加舵机云台测距,采用最常见的SR04超声波传感器,这个传感器比其他测距传感器更简单、灵敏度高,通过给小车一个10 μs的高电平信号,模块就会自动发送8个40 kHz的方波,通过IO触发测距,传感器会自动检测是否有信号返回,当IO接收到的返回信号是高电平时,这也从侧面反映出了超声波整个过程的时间,因为这两个操作所需的时间相同[1]。然后装有超声波舵机云台的小车将会朝前方约180°左右方向扫描物体,从而获得物体距离的数据,然后发送给单片机,驱动智能小车跟随物体[2]。
1.2 系统基本组成
智能寻迹小车由以下几大模块构成:STM32单片机电路、直流电机、TB6612驱动模块、超声波测距外加舵机云台、小车底板、无线蓝牙模块、电源模块等组成。如图1所示。
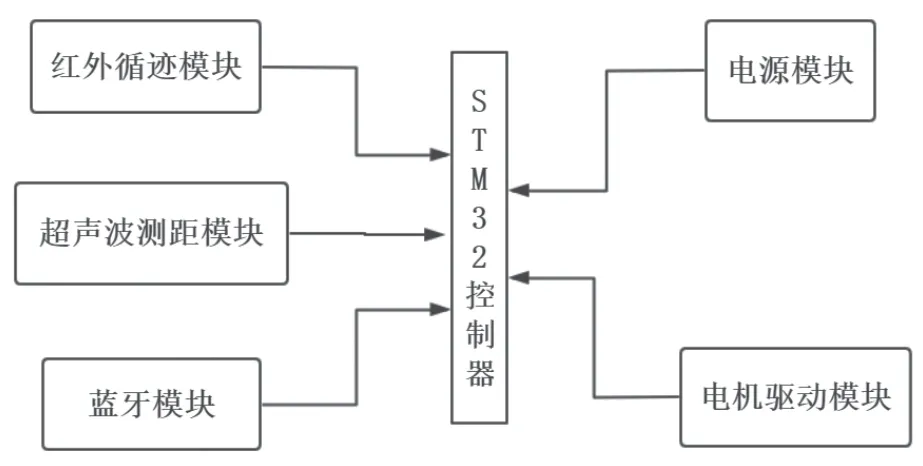
图1 智能寻迹小车控制系统结构框图
(1)单片机电路:采用低成本高性能的STM32芯片作为控制单元,市场上也比较普遍易买,STM32单片机拥有更好的兼容性,可以在此模块内进行编程和设计[3]。之后还可以利用ISP在PCB上烧录调试程序,无须编程器。
(2)电机驱动模块:利用的电机驱动芯片是TB6612,它有两个供电端,逻辑控制部分由5 V供电,另一个是12 V的电机供电端,5 V电压由一个稳压管提供。TB6612电机驱动性能比较优良,市场上比较普及,操作起来没那么困难,还可以已利用自身的使能端及外接电平并通过单片机去实现控制和操作,所以该模块也被广泛的应用到了市场中,对于产品的拓展也相对来说容易一些。
(3)直流电机:采用双直流电动机驱动小车。双直流电动机和异步电动机比起来更加稳定,直流电机本身的控制方法简单,只要在电机两条控制线上加一定的电压便可让电机旋转,在工作电压范围之内,电压越高,电机的转速就会越快。至于直流电动机调速方法有直接调整电压和PWM调速。PWM调速原理就是将输出端的脉冲波形转为正弦波,实现电机转速的改变只需通过改变矩形波的占空比进而实现电压的改变。
(4)超声波测距控制舵机云台:文章前面的跟随系统里已经大致地讲了小车如何通过超声波传感器跟随物体。最常见的超声波传感器SR04,它相比起其他测距传感器较简单、灵敏度也很高。买的现成的超声波传感器,而且附带一个舵机云台,利用IO触发测距,寻迹小车若得到10 μs的高电平信号,该模块会自动发送8个40 kHz的方波,通过模块的自动检测系统判断是否有信号返回。当IO接收到的返回信号是高电平时,据了解可知高电平的持续时间长度便是超声波从发射到返回的时间[4]。那舵机搭载超声波云台便会朝前方约180°左右方向扫描物体,从而得到物体距离数据,然后发送给单片机处理,驱动智能小车跟随物体。
(5)各类辅助传感器:单片机对各个传感器接收到的信息进行综合分析,这一过程称之为信息的融合,对其进行协调时使用实现小车的指令。本车采用红外传感器、温湿度传感器、声音传感器、气敏传感器、光敏传感器采集信号并将信号转换为能被单片机识别的数字信号。
(6)小车底板:铝合金车身,独立悬挂,大扭矩,强动力,可涉水可越野可寻迹可跟随可遥控,采用履带式底盘较智能寻迹小车更加适合在恶劣环境下行走。
(7)无线模块:具备无线功能的小车环境适应性更强,比方说进入未知的山洞探险,因不知其中凶险,这时候小车就可以发挥它的作用了,利用现有的资源,无线遥控便增加了更多的可能性[5]。NRF24L01的2.4G射频模块是一款世界通用ISM频段的单片收发芯片,工作频道为2400~2483 MHz。可同时供50个用户在同一场所同时工作,不需要人为协调配置通道,扩容灵活,成本比较低,市场上应用比较广泛。NRF24L01的SPI接口是利用单片机的硬件SPI口进行模拟的,当然还可以用单片机的I/O口进行模拟实验,因为它内部存在FIFO,这个模块可以帮助它和不同高低速的微处理接口相接,所以相对而言这是个既方便且成本相对较低的单片机[6]。
(8)无线蓝牙模块:蓝牙传输距离大概10米左右,HC-06无线串口蓝牙模块可以直接和各种TTL电平直接连接,通过MCU或者USB转串口来设置参数,也可以通过增加MAX232转换电路接计算机串口。蓝雅技术已经应用在无线遥控小车、机器人遥控、智能家居物联网电器遥控、工业产品控制器遥控等领域。
(9)电源模块:采用两个500 mA充电锂电池串联在一起作为电源,电压约为3.7 V。续航时间约为30 min,通过7805稳压芯片稳压,0.1 μF和470 μF的电容对电源部分电路进行滤波。
2 硬件设计
本次设计的自动寻迹智能小车主要有寻迹模块和跟随模块,其次还有传感器模块,电机驱动模块,蓝牙通信模块,Wi-Fi模块。如图2所示。
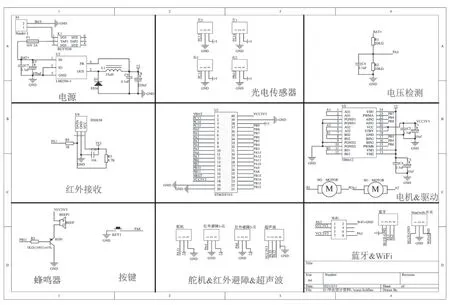
图2 系统硬件电路图
2.1 电机驱动电路
单片机是采用直流电驱动的,利用了SR04模块进行距离测试,L298N电机驱动模块驱动电机正反转,两个强磁、抗干扰的TT减速电机,驱动芯片采用L298N双H桥直流电机驱动芯片,软件系统采用C语言编程[7]。如图3所示。
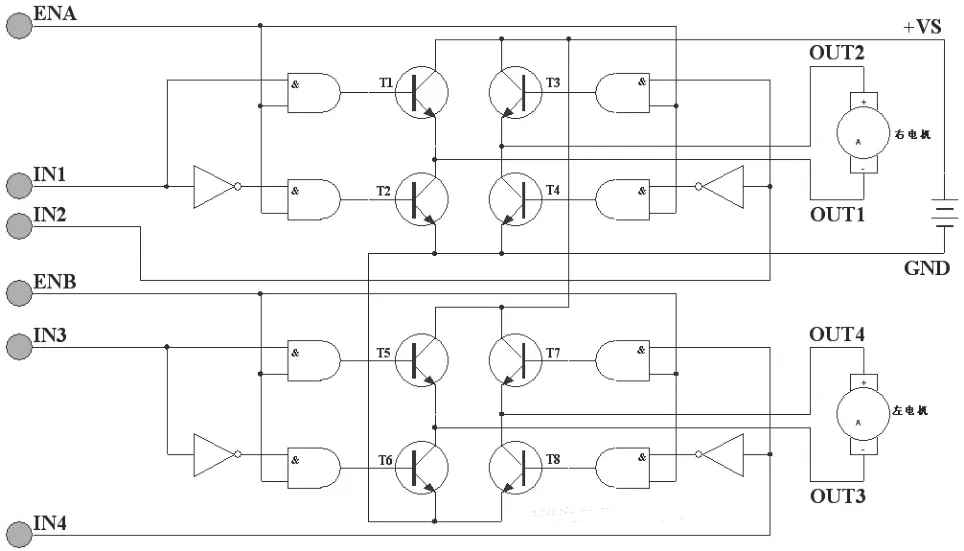
图3 电机驱动模块电路
2.2 智能循迹跟随小车循迹系统
自动寻迹主要包括红外检测模块、电机驱动模块、指示灯模块和STM32单片机控制模块。红外发射管竖直发射出红外线,红外接收管会接收反射的红外线。光电传感器可以将接收到的红外线光信号转化成电信号。随机取一段距离,红外射线照在白色地面上,这时红外传感器接收到反射回的红外线强度就比较大,因为白色地面吸收率比较小,转化的电信号也比较强;若红外线处于黑色引导线,则黑色的引导线会吸收绝大多数的红外线光,这时红外线的强度也相对较弱了,转化为的电信号随之也较弱。所以小车的寻迹就是通过红外传感器接收到的信号强弱来控制的,通过转化为的电信号强弱差异就可以判断小车的路线行驶的。寻迹行驶原理如下:
①当红外传感器LED2、LED3检测到黑线,小车前进,如图4(a)所示。
②当LED1,LED4检测到黑线,小车减速前进。
③当只有LED1检测到黑线,小车偏左转,LED2检测到黑线,小车偏左转,LED1,LED2,LED3均检测到黑线,左大转。如图4(b)所示。
④当LED3检测到黑线,小车偏右转,LED4检测到黑线,小车右转,LED2,LED3,LED4均检测到黑线小车右大转,如图4(c)所示。
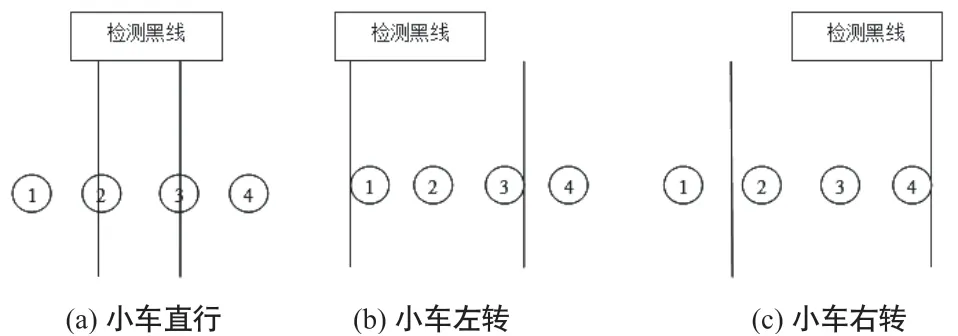
图4 循迹原理
2.3 蓝牙通信模块
无线通信技术使用的比较多的是WLAN、ZigBee、蓝牙。因为蓝牙技术相对来说搭建比较简单,所以本次使用蓝牙技术,使用者可以通过手机对跟随小车进行控制。
2.4 Wi-Fi模块
随着时代的进步,Wi-Fi技术也在不断发展,人们可以随时随地连接Wi-Fi进行娱乐,Wi-Fi已经进入了人们的生活。与传统通信方式相比,该通信方式覆盖面积更大,布线相对简单,传输速度高,适用于困难复杂的工业现场。因此,这可以用在自动寻迹智能小车设计中,使人们可以实时观察小车的行驶环境,并通过个人计算机或手机控制汽车。添加Wi-Fi模块。Wi-Fi模块安装好后,将杜邦线插入单片机上的端口,一一连接。该模块体积小,耗电少,发热少,Wi-Fi和网口传输性能稳定。模块的外围电路非常简单,仅需添加3.3 V直流电源即可启动系统并控制Wi-Fi。如图5所示。

图5 Wi-Fi模块参数图
3 软件设计
3.1 黑线寻迹流程图
首先,单片机初始化,智能小车进入设定路径后,左前照灯指示左前方红外探测状态。也就是说,如果左红外探头检测到黑色制导线,探头工作正常,那么智能跟踪避障避障寻迹小车前的左指示灯就会发光。同理,右侧传感器指示灯会显示右侧的红外检测状态。在系统进行初始化状态后,单片机控制系统根据两侧红外探头反馈回的道路探测信息。根据所得到的结果,即两侧红外检测探头是否检测到黑色引导线做出适当的动作。如果右红外探头没有检测到黑色引导线信号,而左红外探头检测到黑色引导线信号,则这时黑色的导向线的方向是向左边偏移的。这时,电机开始向左转。在非常短的延迟之后,再次判断是否需要左转,直到角度正确。同样,如果左边的红外探头没有信号,而右边的红外探头有信号,也就是黑色的导向线偏移到右边。这时,电机开始向右转。在非常短的延迟之后,再次判断是否需要左转,直到角度正确。
3.2 超声波跟随
小车通过蓝牙串口接收自动跟随指令。打开超声波发射端电源,超声波发射端持续发射超声波。小车车前方的2个超声波接收端持续接收超声波,将接收到的超声波数据经过一定的处理后可以转换为距离信息。通过对左右两端的距离信息进行比较,可以判断出小车需要进行的动作。当小车左端接收到的距离数据大于小车右端接收到的距离数据时,可以判断出超声波的发射位置在小车的偏右侧,所以小车应该向右转向直到小车两接收端接收到的距离数据相等。当小车左端接收到的距离数据小于小车右端接收到的距离数据时,可以判断出超声波的发射位置在小车的偏左侧,所以小车应该向左转向直到小车两接收端接收到的距离数据相等。当小车两接收端接收到的数据相等时,通过比较距离数据与预先设定的跟随阈值的大小,判断小车应该前进还是后退。
4 结束语
本次研究课题为智能小车循迹系统,通过对小车的系统设计和检测,用超声波等技术来对小车周围的环境进行检测,再通过安装的传感器将检测到的信息传递给单片机,从而实现智能化的操控,我们也在这样的技术加持下实现了以下研究成果:一是小车能够在不同的环境下准确的做出判断,帮助小车更加平稳运行实现循迹功能;二是小车保留了扩展功能,增加了蓝牙和Wi-Fi模块,使得小车更加适应恶劣的环境,可以运用于各种场合,充分提高了小车的适应能力。■
猜你喜欢
工业设计(2022年7期)2022-08-12
快乐语文(2020年36期)2021-01-14
文苑(2018年22期)2018-11-19
家庭影院技术(2018年10期)2018-11-02
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2018年8期)2018-06-26
家庭影院技术(2018年3期)2018-05-09
新少年(2017年1期)2017-03-15
军事文摘·科学少年(2016年7期)2016-09-20
