煤矿钻机自动防卡钻电液控制系统研究
2022-02-28 06:08:56李东民朱士明赵元志钟佩思夏尚飞
重庆大学学报 2022年2期
李东民,朱士明,赵元志,王 通,钟佩思,夏尚飞
(1.山东科技大学 a.智能装备学院,山东 泰安 271019;b.机械电子工程学院;c.先进制造技术研究中心,山东 青岛 266590;2.枣庄职业学院 山东 枣庄 277800)
中国松软煤层分布较多,约占煤炭总产量的42%,松软煤层强度低、瓦斯解吸速度快、瓦斯含量相对较高,属煤与瓦斯突出体[1]。瓦斯治理是降低和杜绝瓦斯类事故发生的根本措施,而瓦斯治理的关键在于瓦斯抽采钻孔的施工。钻机在钻孔施工中易发生卡钻事故,卡钻处理时间长,成本高,甚至需要填井侧钻,这极大降低了施工效率[2]。卡钻处理不当,还会损坏钻机,甚至威胁到工人人身安全,因此有必要进行煤矿钻机自动防卡钻的研究。
瑞典Atlas Copco公司的Simba261钻机[3],当回转压力超过某一压力值时,推进机构回退,以此消除卡钻现象。加拿大生产CD360钻机[4],当回转压力升高时,手动调节给进压力使推进力减小,从而预防卡钻。孙永兴等[5]通过优化钻杆结构和钻井液性能制定了防卡钻措施,并进行了现场应用。湖南山河智能机械股份有限公司生产的SWDB165钻机[6],在给进系统上设置减压阀,当有卡钻趋势时,由施工人员调节减压阀使给进系统压力下降,实现预防卡钻。文献[7]提出利用回转压力信号控制给进系统,采用给进力自动控制的防卡钻方案。综上所述,现有方案在一定程度上可避免卡钻事故的发生,但还存在以下问题:一是卡钻的解决大多依靠施工人员的经验以及操作水平,自动化水平低;二是防卡钻方案没有考虑钻机给进力与回转压力的自适应控制,防卡钻效果差。
为提高钻机防卡钻自动化水平,增强防卡钻效果,结合现场施工经验,基于LUDV系统,采用人群搜索算法,建立以PID与信号选择器相结合的控制器,提出了煤矿钻机自动防卡钻电液控制系统。该系统可实现回转动力的自适应变化,避免回转动力不足引发的卡钻,降低了系统能量损失。控制器实时监测回转压力信号,控制电液伺服阀阀芯运动,实现给进力的自适应变化;同时系统可根据回转压力自动判别卡钻程度,并自动采取相应的防卡钻措施,增强了防卡钻的效果。通过AMESim软件进行系统仿真试验,验证了自动防卡钻电液控制系统的可行性。
1 自动防卡钻系统
1.1 钻机结构
以ZDY3200S型全液压煤矿钻机为研究对象,其结构如图1所示,主要由动力头、给进装置、夹持装置、机架组成。
动力头为钻机提供回转动力,结构主要包括液压马达、卡盘和减速箱;给进装置实现动力头沿机身导轨的往复移动,结构主要包括液压缸和拖板。夹持器固定在给进装置前端,用于夹持孔内钻具。机架用于安装给进装置和固定钻机,由立柱、支撑油缸及支撑杆等组成。
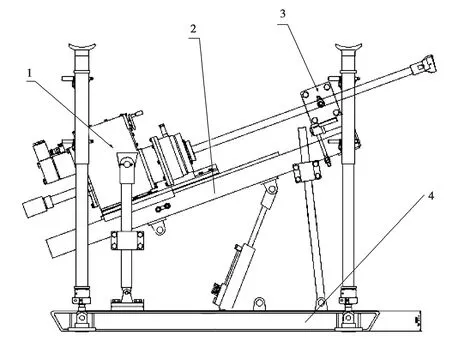
1—动力头;2—给进装置;3—夹持装置;4—机架图1 钻机结构Fig.1 Drilling rig structure
1.2 卡钻机理
结合现场施工经验,卡钻主要原因可概括如下:
1)排渣不畅引起的卡钻。钻机在松软煤层钻进时,钻渣易在钻杆内部和表面沉积,导致排渣不畅[8]。当回转动力未能克服钻渣给钻杆的阻力时,便会发生卡钻。
2)裂隙卡钻。松软煤层是地质构造的产物,主要由断层和层滑等运动形成[9],因此在松软煤层形成过程中易出现裂隙。当钻头进入不规则裂隙时,极易被裂隙内细小的岩石卡死,造成卡钻事故。
1.3 控制器
1.3.1 PID控制器
在自动防卡钻电液控制系统中,PID控制器用于回转压力的控制。控制器设定值为22 MPa,输入值为油压传感器实时反馈的回转压力值,偏差值为设定值减去输入值,PID控制器以偏差值为输入信号,在对偏差进行比例、积分、微分运算后输出控制信号。当回转压力超过设定值22 MPa时,PID控制器通过3种不同形式的控制作用消除系统偏差,抑制回转压力持续上升[10]。
1.3.2 信号选择器

图2 信号选择器Fig.2 Signal selector
信号选择器可以在两个或多个输入信号中自动选择期望信号[11],信号选择器原理如图2所示。当命令信号(端口2的输入信号)大于或等于用户设定值时,信号选择器将从端口1输出端口3的信号值;当命令信号低于设定值时,信号选择器将输出端口4的信号值。
在自动防卡钻电液控制系统中,信号选择器用于给进系统的控制,用户设定值为零,端口2的输入信号为回转压力值与设定压力值的偏差信号。当偏差为正值或零时,信号选择器将从端口1输出端口3的信号值;当偏差为负值时,信号选择器将输出端口4的信号值。端口3控制给进机构前进,端口4控制给进机构回退。
1.4 自动防卡钻方案
钻机自动防卡钻液压控制系统原理如图3所示。
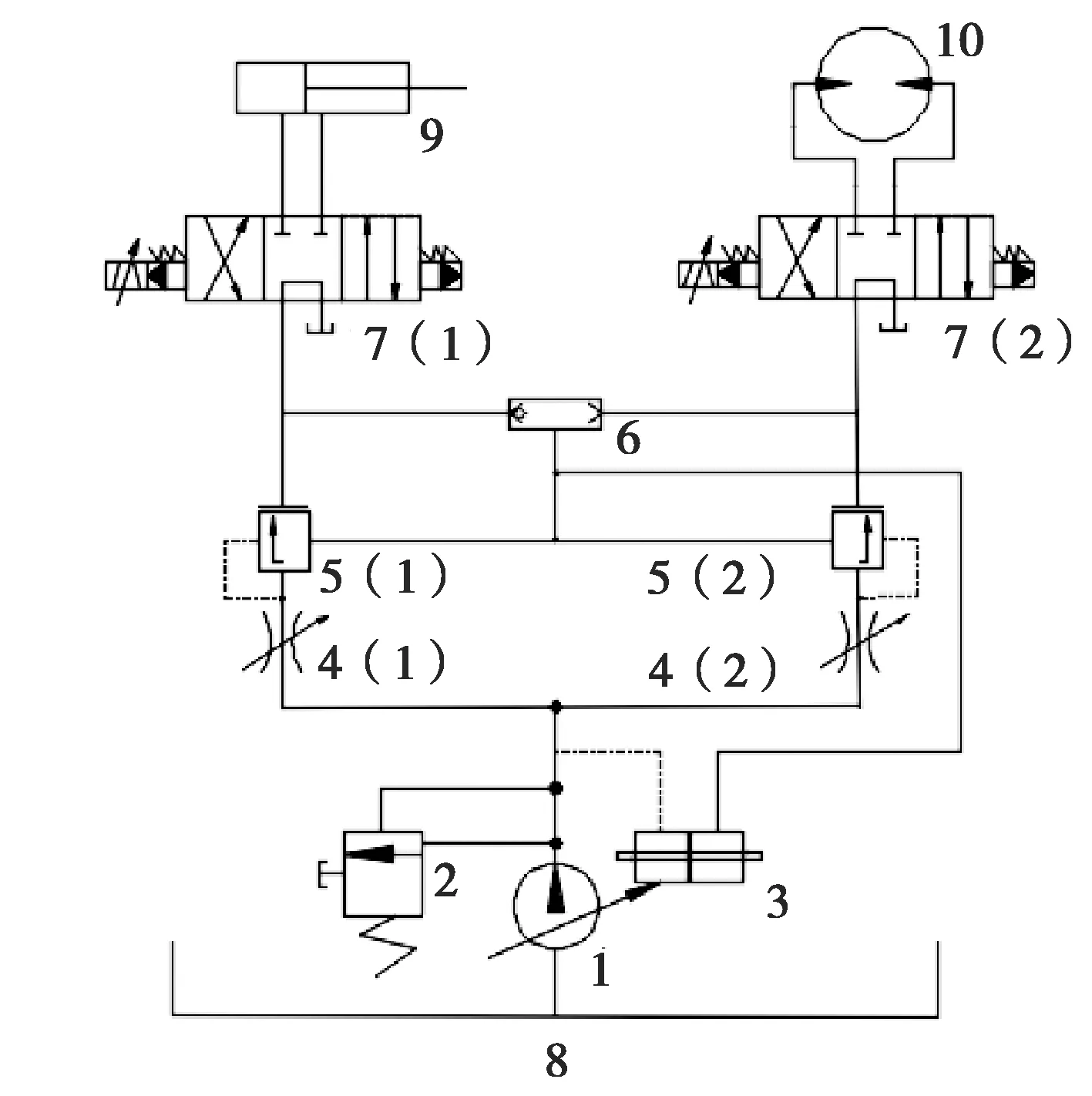
1—液压泵;2—溢流阀;3—变量缸;4—节流阀;5—压力补偿阀;6—梭阀;7—电液伺服阀;8—油箱;9—液压缸;10—液压马达图3 自动防卡钻原理图Fig.3 Schematic diagram of automatic anti-sticking
基于LUDV建立的液压系统,将最高负载压力反馈至两处[12]:一是反馈至压力补偿阀,使回转与给进回路的压力补偿阀阀芯同步移动,阀口通流面积保持一致,使各支路流量仅与节流阀节流口面积大小有关。二是反馈至负载敏感泵的变量机构,使泵出口压力跟随负载压力变化,实现回转压力的自适应控制,提高系统工作效率,避免发生卡钻事故。
基于信号选择器和PID建立的防卡钻控制系统,将回转压力信号实时反馈至信号选择器和PID控制器,进而控制给进和回转回路的电液伺服阀阀芯移动,实现回转压力和给进力的自适应控制。当回转压力达到设定值K2(2)时,回转压力信号经减法器3(2)后输出的信号为正值,因此信号选择器输出端口3的信号,该信号经增益5(2)放大后控制电液伺服阀换向,使钻机回退;若回退过程中压力下降至设定值K2(2)以下,钻机恢复钻进;若回转压力持续升高,此时回转压力信号经减法器3(1)后产生偏差,该偏差经PID进行比例、积分和微分运算后输出控制信号,该信号经增益5(1)放大后控制电液伺服阀阀芯移动,使回转压力维持在设定值K2(1),避免压力过高损伤钻机,同时又能保持较大的回转动力来克服外负载阻力,实现自动防卡钻控制。其原理如图4所示。

1—油压传感器;2—设定值;3—减法器;4—PID控制器;5—增益;6—信号选择器图4 控制系统原理图Fig.4 Schematic diagram of control system
2 SOA-PID算法
钻机回转系统采用PID控制,控制器性能主要取决于参数设置,采用人群搜索算法[13]进行PID参数整定,使PID具有响应快和鲁棒性好等优点。
2.1 定义种群
令种群Q中搜寻者个体数为S,由于需整定PID控制器的3个参数,因此系统维数W=3,该种群Q用S×W的矩阵表示为
(1)
2.2 确定适应度函数
采用误差绝对值的时间积分性能指标作为最小目标函数,并引入控制输出量的平方项,同时为避免系统产生过大超调,加入惩罚系数,适应度函数为
(2)
式中:e(t)为信号输入量和输出量的误差值;u(t)为PID控制器输出量;ω1、ω2为加权值,取值区间为[0,1];ω3为惩罚系数,且ω3>>ω1。这里取ω1=0.99,ω2=0.01,ω3=100。
2.3 搜索步长的确定
SOA采用高斯隶属度函数来表示搜索步长的模糊变量,即
(3)
式中:μA(x)为高斯隶属度函数,x为输入变量,δ、μ均为隶属度函数参数。
设定μmin,故μA取值范围为[0.0111,1]。
根据不确定推理可求得步长
(4)
式中:αij为j维空间的搜索步长,δij为高斯隶属度参数,uij为j维空间目标函数i隶属度。
2.4 搜索方向的确定
人群搜索算法对人的利己行为、利他行为和预动行为进行分析建模,确定搜索方向。
dij=sign(ωdij,pro+φ1dij,ego+φ2dij,alt),
(5)
式中:ω为惯性权值,φ1、φ2为[0,1]常数,sign()为符号函数,di,ego为利己方向,di,alt为利他方向,di,pro为预动方向。
2.5 个体位置的更新
确定的步长及搜索方向之后,可进行相应的位置更新,如式(6)(7)所示。
Δxij(t+1)=αij(t)dij(t),
(6)
xij(t+1)=xij(t)+Δxij(t+1)。
(7)
SOA按照以上流程实现对PID参数整定。
2.6 SOA整定PID参数结果
设种群规模为30,最大迭代次数为500,KP、KI、KD3个参数搜索范围为[0,120],仿真结果如图5、6所示。

图5 适应度函数曲线Fig.5 The curve of fitness function

图6 PID参数整定结果Fig.6 Optimization results of PID control parameters
由图5、6可知,人群搜索算法在迭代了97次之后收敛,最终产生1组PID控制器参数最优解:KP=19.1930、KI=0、KD=4.063 9。
3 建模与分析
AMESim可以解决绝大部分液压工程的仿真问题,它提供了从流体力学到液压传动到伺服系统的完整解决方案[14]。
3.1 负载敏感泵模型
利用AMESim中的液压库(hydraulic)以及液压元件设计库(hydraulic component design)对负载敏感泵进行建模,模型如图7所示。最高负载压力反馈至LS口与泵出口压力比较,并通过变量缸的阀芯位移信号去控制泵斜盘摆角的大小和方向,进而使泵出口压力与最高负载压力同步变化[15]。

图7 负载敏感泵模型Fig.7 Load sensitive pump model
3.2 压力补偿阀模型
利用液压元件设计库对压力补偿阀进行建模,模型如图8所示。最高负载压力同时反馈至给进和回转回路的压力补偿阀弹簧腔,并与泵出口压力比较,进而控制压力补偿阀节流口面积大小[16]。
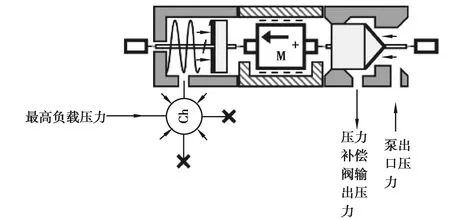
图8 压力补偿阀模型Fig.8 Pressure compensation valve model
3.3 防卡钻系统模型
以ZDY3200S钻机为研究对象,除默认参数外,钻机主要参数如表1所示。
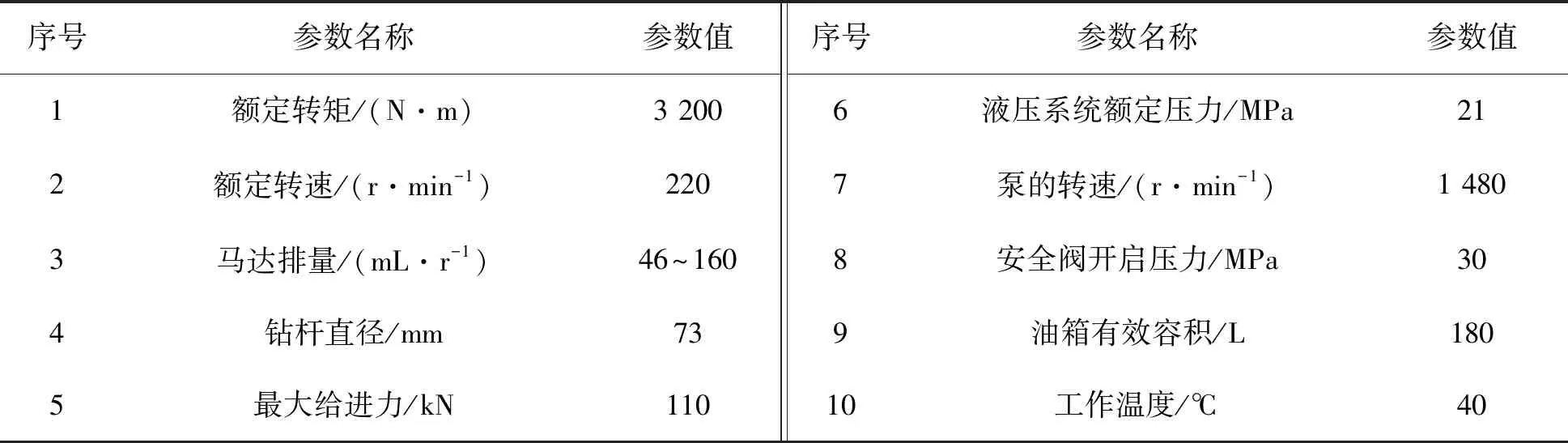
表1 ZDY3200S钻机主要参数Table 1 ZDY3200S main parameters of drilling rig
钻机液压系统额定工作压力为21 MPa,考虑液压系统油液泄漏等问题,当传感器监测到回转压力为20 MPa时,钻机有发生卡钻的趋势,信号选择器控制钻机回退;若回退过程中回转压力下降至20 MPa时,钻机恢复正常钻进;若回退过程中回转压力继续升高并超过22 MPa时,PID控制器抑制回转压力持续升高,同时钻机保持回退,尝试解决卡钻问题。
钻机给进、回退以及回转压力的控制是由控制系统实现的,除默认参数外,控制系统主要参数如表2所示。
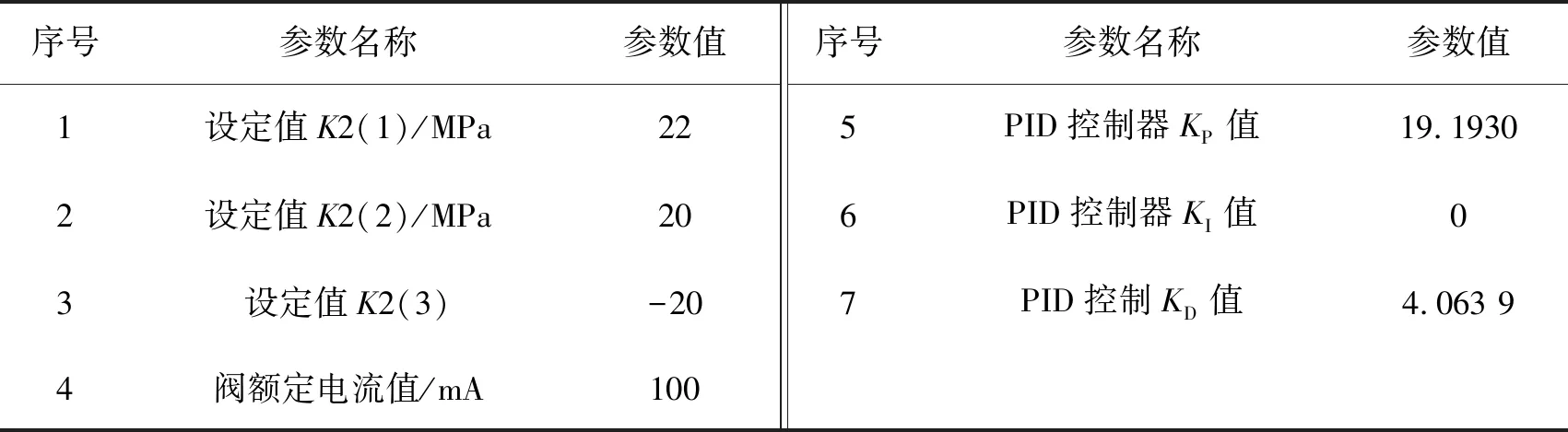
表2 控制系统主要参数Table 2 Main parameters of control system
按照以上参数的设定,利用AMESim搭建如图9所示的模型。
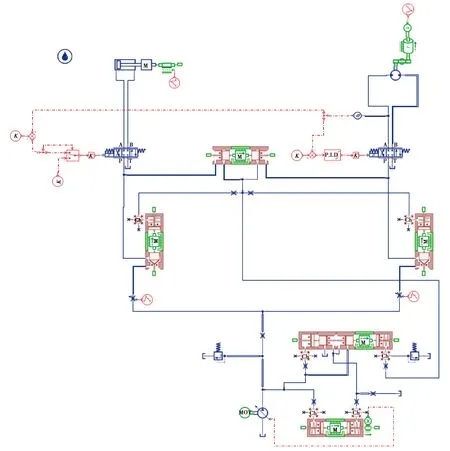
图9 防卡钻系统模型Fig.9 Model of anti-sticking system
3.4 负载信号
ZDY3200S钻机额定扭矩为3 200 N·m,当工作扭矩超过3 200 N·m时,有发生卡钻的趋势。为完整模拟钻机从开始工作到卡钻再到恢复工作的整个过程,施加如图10所示的负载信号。0~2 s为钻机启动状态,2~5 s为正常工作状态,5~8 s为发生卡钻状态,8~11 s为钻机空载状态,11~15 s为正常工作状态。
仿真时间设置为15 s,通讯间隔时间为0.01 s。

图10 负载信号Fig.10 Load signal
3.5 回转压力和泵出口压力分析
如图11所示,0~2 s为钻机启动阶段,此时外负载及系统压力较小,液压油泄漏及节流口压力损失几乎为零,因此回转压力几乎等于泵出口压力。2 s以后,泵出口压力与外负载同步变化。由卡钻机理1可知,当回转动力无法克服钻渣给钻杆的阻力时,便会发生卡钻。LUDV采用负载敏感泵,泵出口压力与外负载变化相一致[17],实现回转动力的自适应变化;5~8 s,钻机排渣不畅,外负载增大时,回转阻力增大,因此负载敏感泵斜盘摆角增大,泵输出流量和压力增大,回转动力增强,以此预防和解决排渣不畅引起的卡钻。

图11 回转压力和泵出口压力曲线Fig.11 Rotary pressure and pump outlet pressure curve
3.6 回转压力和给进速度分析
如图12所示,LUDV可保持两个或多个执行机构同步协调变化[18],因此在启动阶段0~2 s,当回转压力升高时,推进速度同步升高,提高了施工效率;2~5 s为正常工作阶段,回转压力恒定,推进速度也保持匀速。
如图10所示,5~8 s外负载持续升高,油压传感器实时反馈压力信号至信号选择器,由于信号选择器设定值为0,当回转压力超过20 MPa时,经减法器输出的信号为正值,因此信号选择器输出端口3的信号值,该信号经增益放大后控制电液伺服阀换向,使给进机构回退,以此尝试解决卡钻问题。
如图12中6~8 s所示,若回退过程中由于裂隙摩擦阻力较大或受裂隙中岩石或煤渣影响,钻机仍未解决卡钻问题,回转压力继续升高,油压传感器实时将回转压力信号反馈至PID控制器,回转压力信号经减法器后产生偏差,该偏差经比例、积分和微分运算后输出控制信号,该信号经增益放大后控制电液伺服阀阀芯移动,使回转压力维持在22 MPa,避免回转压力持续升高损坏钻机,同时保持较大的回转动力克服外负载阻力。
如图12中8~11 s所示,当解除卡钻后,由于回退过程中钻机空载,因此回转压力迅速下降,当回转压力下降至20 MPa,钻机开始给进,给进速度从负值变为正值。11~15 s,钻机恢复正常工作。

图12 回转压力和给进速度曲线Fig.12 Rotary pressure and feed speed curve
4 结 论
1)针对钻机在松软煤层钻孔施工时的卡钻问题,通过分析卡钻机理,建立自动防卡钻控制器,采用LUDV、人群搜索算法等技术,提出了煤矿钻机自动防卡钻电液控制系统。该系统实时监测钻机工况,自动判别卡钻程度,并自动采取相应的防卡钻措施,实现了给进力和回转动力的自适应变化,提高了防卡钻的自动化水平,增强了防卡钻效果,降低了系统能量损耗。研究内容为后续煤矿钻机的系统优化提供了新思路,为解决钻机在松软煤层中的卡钻问题提供了新方法。
2)钻机在防卡钻控制过程中,控制器需对输入信号迅速响应。采用人群搜索算法整定PID参数,为参数设置提供了科学依据,提高了控制器鲁棒性以及快速响应性,在工程上具有一定实用性。
猜你喜欢
电子工业专用设备(2024年1期)2024-02-29 02:24:46
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
化工管理(2021年7期)2021-05-13 00:46:16
装备制造技术(2020年3期)2020-12-25 05:22:38
中国科技博览(2018年30期)2018-08-03 09:20:48
电脑与电信(2017年6期)2017-08-08 02:04:22
中国科技博览(2016年8期)2016-04-25 19:48:13
当代化工研究(2016年6期)2016-03-20 16:21:47
专用汽车(2016年4期)2016-03-01 04:14:27
大学物理实验(2015年2期)2015-10-22 01:04:39