智能网联汽车结构层次及技术分析
2022-02-28 11:09:27党超
内燃机与配件 2022年5期
党超
摘要:根据公安部交通管理数据显示,2020年我国汽车保有量已达2.81亿辆,位居世界第一。随着汽车数量的逐年递增,环境污染问题、道路拥堵问题,能源短缺问题及交通事故等问题也越来越严重,对汽车的进一步发展产生一定的消极影响。而智能网联汽车作为汽车未来的发展趋势,有利于解决以上问题。本文主要分析了智能网联汽车的技术及结构层次。
Abstract: According to the traffic management data of the ministry of public security, the number of cars in China has reached 281 million in 2020, ranking first in the world. With the increasing number of vehicles year by year, the problems of environmental pollution, road congestion, energy shortage and traffic accidents are becoming more and more serious, which has a certain negative impact on the further development of vehicles. As the future development trend of automobile, intelligent and networked vehicle is conducive to solve the above problems. This paper mainly analyzes the technology and structure hierarchy of intelligent and networked vehicle.
关键词:智能网联汽车;技术分析;结构
Key words: intelligent and connected vehicle;technical analysis;structure
中图分类号:U46 文献标识码:A 文章编号:1674-957X(2022)05-0220-03
0 引言
根据《国家车联网产业标准体系建设指南》对智能网联汽车定义:智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。智能网联汽车具有两个层面:一是智能化,二是网联化。
在智能化层面,汽车配备了多种传感器(摄像头、超声波雷达、毫米波雷达、激光雷达),实现对周围环境的自主感知,通过一系列传感器信息识别和决策操作,汽车按照预定控制算法的速度与预设定交通路线规划的寻径轨迹行驶。在网联化层面,车辆采用新一代移动通信技术(LTE-V、5G等),实现车辆位置信息、车速信息、外部信息等车辆信息之间的交互,并由控制器进行计算,通过决策模块计算后控制车辆按照预先设定的指令行驶,进一步增强车辆的智能化程度和自动驾驶能力,最终实现在智慧交通中无人驾驶。
1 智能网联汽车结构层次
智能网联汽车是以新能源汽车为基体,利用各种传感器及网络通信,让汽车安全行驶。智能网联汽车由环境感知层、智能决策层以及控制执行层组成。感知主要分为自主式感知和网联式感知。通过车载传感器获得的对复杂环境的感知,称为自主式感知;借助现代通信和网络技术来感知环境,称为网联式感知。
存在于互联网络中的智能网联汽车,通过密切交互,形成了一种特定的新型网络系统-车联网。车联网除了包括车车通信、车路通信和车辆内部通信外,还包括了在移动互联下能提升安全和节能等方面指标的信息服务。智能网联汽车在结构层次可以分为环境感知层、智能决策层和控制执行层。
1.1 环境感知层
环境感知层的主要功能是通过车载环境感知技术、卫星定位技术、4G/5G及V2X无线通信技术等,实现对车辆自身属性和车辆外在属性(如道路、车辆和行人等)静态、动态信息的提取和收集,并向智能决策层输送信息。
1.2 智能决策层
智能决策层的主要功能是接收环境感知层的信息并进行融合,对道路、车辆、行人、交通标志和交通信号等进行识别,决策分析和判断车辆驾驶模式及将要执行的操作,并向控制和执行层输送指令。
智能決策层类似于人类大脑,车辆通过感知识别端从外部获取环境信息后,将信息进行集成处理,传送到决策端,车辆决策端需要依靠这些信息做出正确精准的控制决策,并将决策下达至执行端,以完成自动驾驶,自动驾驶的环境感知端会感知并识别车道线、车辆、行人、交通标志等目标,并会采集大量的图像信息,而这些信息会形成一个数据模型,然后与数据库中的模型进行对比、分析、评估并纠错;智能网联汽车在反复的路测中,会不断提高对道路信息识别程度,并为之做出合理的决策控制。
1.3 控制执行层
控制执行层的主要功能是按照智能决策层的指令,对车辆进行操作和协同控制,并为联网汽车提供道路交通信息、安全信息、娱乐信息、救援信息以及商务办公、网上消费等,保障汽车安全行驶和舒适驾驶。
执行系统类似于人的手脚,用来执行决策系统的命令,有点类似于计算机的输出端,最终实现车辆的行驶。
2 智能网联汽车关键技术
2.1 环境感知技术
环境感知包括车辆本身状态感知、道路感知、行人感知、交通信号感知、交通标识感知、交通状况感知、周圍车辆感知等,主要由各种传感器来感知。
2.1.1 视觉传感器在智能网联汽车中的应用
视觉传感器是指通过对摄像头拍摄到的图像进行图像处理,对目标进行检测,并输出数据和判断结果的传感器。视觉传感器在智能网联汽车或无人驾驶汽车上的应用是以摄像头(机)出现,并搭载先进的人工智能算法,便于目标检测和图像处理。根据汽车摄像头模块的不同,目前使用的摄像头分为单目摄像头、双目摄像头和红外摄像头。红外夜视系统是视觉传感器一个独特的分支,图像处理算法在处理远红外夜视图像过程中依然能够发挥作用,因此红外夜视系统能够像可见光摄像头一样,获取环境中的目标大小和距离等信息,对光照不足条件下对基于可见光的视觉传感器的应用是一种有效补充。
智能网联汽车传感系统是一个多传感器的复杂系统。使用单目摄像头是一种很好的方法,但是单目摄像头依赖大量训练样本、特征提取过程难以观测和调整等。由于传感器的物理特性,摄像头测距精度远低于激光雷达和多普勒雷达。因此在实际应用中,需要结合激光雷达和多普勒雷达等其他传感器进行探测,这些传感器在各自的约束条件下能够发挥各自最优的性能,各类传感器的融合将大大提高目标检测的精度。在汽车智能驾驶中,通过不同焦距和不同仰角的多个单目摄像头,可以获得不同位置的交通标志、信号灯和各种道路标志的检测和识别能力。随着电子化、信息化与人工智能技术的发展,小型化和嵌入式的视觉传感器得到了广泛应用,人们可以从车载摄像头中获得更智能的结果,即通过摄像头的视场,感知驾驶环境。
视觉传感器主要应用于车道偏离预警、车道保持辅助、前向碰撞预警、行人碰撞预警、交通标志识别、盲区监测、夜视辅助、自动泊车辅助、全景泊车、驾驶员疲劳预警等。
2.1.2 雷达在智能网联汽车中的应用
智能网联汽车上的雷达有毫米波雷达、超声波雷达、激光雷达等。超声波雷达是汽车最常用的一种传感器,可以通过接收到反射后的超声波探知周围的障碍物情况,消除了驾驶员停车泊车、倒车和起动车辆时前、后、左、右探视带来的麻烦,帮助驾驶员消除盲点和视线模糊缺陷,提高了行车安全性。超声波雷达被广泛应用于倒车辅助系统和自动泊车系统中。车载超声波雷达主要分为UPA和APA两大类。UPA是一种短程超声波,主要安装在车身的前部与后部,检测范围为5cm-5m,由于检测距离大,多普勒效应和温度干扰小,检测更准确。APA是一种远程超声波传感器,主要用于车身侧面,检测范围为35cm-5m,可覆盖一个停车位。方向性强,探头波的传播性能优于UPA,不易受到其他APA和UPA的干扰。当然,检测距离越远,检测误差越大。
激光雷达(LiDAR)是集激光、全球定位系统(GPS)和IMU惯性测量装置三大技术为一体的系统。典型激光雷达:接收系统采用了各种形式的光电探测器,如光电倍增管、半导体光电二极管、雪崩光电二极管、红外线和可见光多元探测器。激光雷达使用两种工作模式:脉冲和连续波。根据探测原理,探测方法可分为米散射、瑞利散射、拉曼散射、布里渊散射、荧光、多普勒等。实时激光雷达一般分为16线、3线和64线,雷达测距的精度非常重要,以16线激光雷达为例,它具有角分辨率,如果行人在50米以外,只有一条激光脉冲线。激光雷达在智能网联汽车中的应用:车辆辅助驾驶和无人驾驶的整体解决方法是激光雷达+多传感器融合算法+高性能嵌入式算法控制板+可视化界面配置软件,采用单线或多线激光雷达+摄像头+毫米波雷达检测车辆周围的道路环境,实现多传感器功能互补。采用数据融合算法提取道路的车道线信息、障碍物属性和障碍物运行状态信息,综合分析给出警告信息,提醒驾驶员对车辆进行相应的控制,确保安全驾驶。
2.2 车联网技术
长距离无线通信技术用于提供即时的互联网接入,主要用4G、LTE、GPRS等技术。短距离通信技术有专用短程通信技术(DSRC)、蓝牙、2.4G通信技术等,其中DSRC重要性较高且亟须发展,它可以实现在特定区域内对高速运动下移动目标的识别和双向通信,例如V2V、V2I双向通信,实时传输图像、语音和数据信息等。
2.3 云计算平台
云计算平台通过以太网络与车辆、路侧设备进行远程通信,实现远程监控、车辆追踪、调度管理和路径规划等功能,同时还能够利用云计算和大数据处理,为自动驾驶控制策略、智能交通控制管理的研究提供数据依据。
2.4 网络信息安全
智能网联汽车需满足车联网通信的保密性、完整性、可鉴别性等要求。通过引入密码安全芯片、设计“端-管-云”安全主动防御机制、密码安全协议和设置可信计算区域等手段,对云计算平台和车载终端进行软件代码和物理硬件安全升级。
2.5 先进的驾驶辅助技术
先进驾驶辅助系统(ADAS)是利用安装在车辆上的传感器、通信、决策及执行等装置,实时监测驾驶员、车辆及其行驶环境,并通过影响、灯光、声音、触觉提示/警告或控制等方式辅助驾驶员执行驾驶任务或主动避免/减轻碰撞危害的各类系统的总称。
智能汽车的初级阶段是具有先进驾驶助系统(Advanced Driver Assistance Systems,ADAS)的汽车。ADAS在汽车上的配置越多,其智能化程度越高,其终极目标是无人驾驶汽车。智能汽车的发展方向是自动化、网联化、智能化和共享化。智能汽车的自动化程度越高越接近自动化汽车,网联化程度越高越接近网联汽车,最终发展成为无人驾驶的智能网联汽车。
2.5.1 前向碰撞预警系统
前向碰撞预警(FCW)系统通过雷达或视觉传感器时刻监测前方车辆,判断本车与前车之间的距离、方位及相对速度,当存在潜在碰撞危险时对驾驶员进行警告。前向碰撞预警系统由信息采集、电子控制和人机交互三个单元组成。通过分析传感器获取的前方道路信息对前方车辆进行识别和跟踪,如果有车辆被识别出来,则对前方车距进行测量;同时利用车速估计,根据安全车距预警模型判断追尾可能,一旦存在追尾危险,便根据预警规则及时给予驾驶员主动预警。
2.5.2 车道偏离预警系统
车道偏离预警系统主要由信息采集单元、电子控制单元和人机交互单元等组成。该系统可以在行车的全程自动或手动开启,以监控汽车行驶的轨迹。当系统正常工作时,信息采集单元将采集车道线位置、车速、汽车转向角等信息,电子控制单元将所有的数据转换到统一的坐标系下进行分析处理,从而获得汽车在当前车道中的位置参数,并判定汽车是否发生非正常的车道偏离。
2.5.3 盲区监测系统
盲区监测(BSD)系统也称汽车并线辅助(LCA)系统,是通过摄像头、毫米波雷达等车载传感器检测视野盲区内有无来车,在左右两个后视镜内或其他地方提醒驾驶员后方安全范围内有无来车,从而消除视线盲区,提高行车安全性。当汽车速度大于某一阈值时,例如10km/h,盲区监测系统自动启动,如果监测范围内有车辆或行人,就会被信息采集单元监测到,计算出目标的距离、速度等信息,并将采集到的信息传递给电子控制单元;电子控制单元根据收到的信息判断进入监测范围内的车辆或行人是否对本车造成威胁,如果存在安全隐患,则通过预警显示单元提醒驾驶员,并根据危险程度、驾驶员的反应提供不同的预警方式。
2.5.4 车道保持辅助系统
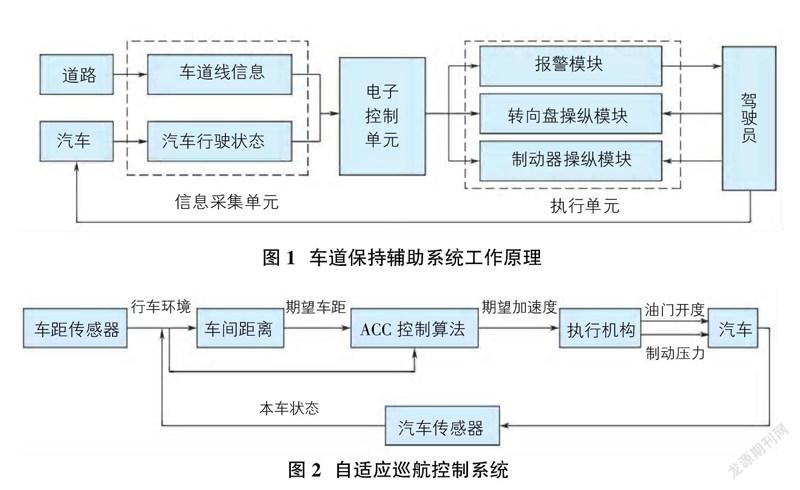
车道保持辅助(LKA)系统是一种能够主动检测汽车行驶时的横向偏移,对转向和制动系统进行协调控制,实现主动对车道偏离现象进行纠正,使汽车保持在预定的车道上行驶,从而减轻驾驶员负担,减少交通事故的发生。该系统主要由信息采集单元、电子控制单元和执行单元等组成。在系统工作期间,驾驶员将会接收车道偏离的报警信息,并选择对转向系统和制动系统中的一项或多项动作进行控制,也可交由系统完全控制,如图1所示。
2.5.5 自动制动辅助系统
汽车AEB系统:采用测距传感器测出与前车或障碍物的距离,与报警距离、安全距离进行比较,小于报警距离时就进行报警提示;小于安全距离时,即使在驾驶员没来得及踩制动踏板的情况下,AEB系统也会启动,使汽车自动制动。
2.5.6 自适应巡航控制系统
自适应巡航控制(ACC)系统由信息感知、电子控制、执行单元、人机界面组成。在汽车行驶过程中,车距传感器持续扫描汽车前方道路,同时轮速传感器采集车速信号;当前汽车与前方车辆之间的距离小于或大于安全车距时,ACC控制单元通过与制动系统、发动机控制系统协调动作,改变制动力矩和发动机输出功率,对汽车行驶速度进行控制,始终保持安全车距行驶,如图2所示。
2.5.7 自动泊车辅助系统
自动泊车辅助系统(PA):利用车载传感器探测有效泊车空间,并辅助控制车辆完成泊车操作的系统;减轻了驾驶员的操作负担,有效降低了泊车的事故率。自动泊车辅助系统由感知单元、中央控制器、转向执行机构和人-机交互系统组成。通过车载传感器扫描汽车周围环境,通过对环境区域的分析和建模,搜索有效泊车位,当确定目标车位后,系统提示驾驶员停车并自动启动自动泊车程序,根据所获取的车位大小、位置信息,由程序计算泊车路径,然后自动操纵汽车泊车入位。
3 结论
智能网联汽车作为当下汽车最新的研究方向,必将在未来汽车市场发挥越来越重要的作用。本文对智能网联汽车的结构及技术进行了分析,通过本文的研究,為智能网联汽车的进一步研究提供一定的理论基础。
参考文献:
[1]孙常林.智能网联汽车发展现状分析[J].产业创新研究,2020(20):34-35.
[2]李克强,戴一凡,李家文.智能网联汽车发展动态及对策建议[J].智能网联汽车,2018(1):12-19.
[3]李寒洋.浅谈智能网联汽车发展现状及趋势[J].汽车工业研究,2020(1):3-10.
[4]徐国艳,宗孝鹏,余贵珍,等.基于DDPG的无人车智能避障方法研究[J].汽车工程,2019,41(2):206-212.
[5]杨顺,蒋渊德,吴坚,等.基于多类型传感数据的自动驾驶深度强化学习方法[J].吉林大学学(工学版),2019,49(4):1026-1033.
[6]白朋涛.信息通信技术对智能网联汽车数据资源的影响分析[J].数据通信,2019(1):51-53.
[7]薛俊.我国智能网联汽车行业发展现状探析[J].质量与标准化,2019(4):56-59.
[8]李克强,李家文,常雪阳,等.智能网联汽车云控系统原理及其典型应用[J].汽车安全与节能学报,2020,11(3):261-275.
[9]王晓原,杨新月.基于决策树的驾驶行为决策机制研究[J].系统仿真学报,2008,20(2):415-419.
[10]张新钰,高洪波,赵建辉,等.基于深度学习的自动驾驶技术综述[J].清华大学学报(自然科学版),2018,58(4):438-444.
[11]王建强,郑讯佳,黄荷叶.驾驶人驾驶决策机制遵循最小用量原理[J].中国公路学报,2020,33(4):155-168.
[12]常雪阳,许庆,李克强,等.通信时延与丢包下智能网联汽车控制性能分析[J].中国公路学报,2019,32(6):216-225.
猜你喜欢
哲学评论(2021年2期)2021-08-22 01:53:34
中华诗词(2019年7期)2019-11-25 01:43:04
中国科技博览(2018年10期)2018-03-28 10:57:42
科技视界(2017年29期)2018-01-18 06:10:26
汽车科技(2017年3期)2017-06-12 12:41:56
影视与戏剧评论(2016年0期)2016-11-23 05:26:01
体育时空(2016年9期)2016-11-10 21:36:43
体育时空(2016年9期)2016-11-10 21:26:18
中国新通信(2016年16期)2016-10-18 10:58:17
科学与财富(2016年28期)2016-10-14 19:39:04