基于农机CAN总线的OneNet远程监测系统研究*
2022-02-25 02:41温鑫王熙
中国农机化学报 2022年1期
温鑫,王熙
(黑龙江八一农垦大学工程学院,黑龙江大庆,163319)
0 引言
2019年国务院发表关于加快推动农业机械化和农机装备产业转型升级的指导意见中明确指出:要推动智慧农业的应用与发展,促进物联网、大数据等高新信息技术在农业机械和农机作业上的应用[1]。将信息技术与农业机械相结合,更是实现农业现代化的重要助力[2]。
随着物联网技术与农业机械的不断结合,国内相关研究也越来越多:李建军等[3]研究了一种用于圆捆机的远程监控系统,实现了作业现场与远程监控地点间的信息交互。杜志伟等[4]研发了一款基于物联网技术用于监测农机状态参数的系统,实现了农机位置信息和运行参数采集与上传,并拥有较高的数据传输成功率。国家农业信息化工程技术研究中心将3S技术与物联网技术相结合研发了一套用于远程监控和指挥农业机械调度系统,有效避免了盲目农业机械调度,提高了农业机械调度效率[5]。
但总体上,我国目前农业机械智能化技术依然处于较低的水平,特别是缺乏将CAN总线技术与物联网技术相结合的农业机械状态参数在线监测设备[6]。
研究一种通过CAN总线技术采集并远程实时上传玉米中耕变量施肥机状态参数的监测系统。通过嵌入式系统作为数据终端对施肥机的位置信息和状态参数进行采集,借助数据终端上搭载的无线通信模块实现了数据实时上传,最后采用OneNet平台对上传至服务器的数据进行可视化的转换,通过图形化的交互界面供用户实时查看。整套系统实现了玉米中耕变量施肥机位置和状态参数实时监测,提高了农机使用效率和信息化水平,为农机大数据技术发展提供了有力的支撑。
1 系统整体架构研究
整个系统的组成可大致分为三大部分,即感知部分、网络部分和应用部分[7]。用于施肥机位置信息和状态参数采集的感知层,主要由农业机械上安装的相关传感器及远程数据终端组成。负责信息传输的网络层主要由无线通信模块及运营商信号塔组成,负责数据展示与人机交互的应用层由智能化移动设备和PC端组成。系统的主要架构如图1所示。
安装于施肥机的定位系统与转速传感器等采集施肥机各项参数,通过施肥机上搭载的CAN通信线路发送至位于系统感知层的远程数据终端,经终端中主控制器解析与转化之后,数据借助于终端中的无线通信模块发送至OneNet的云端服务器上,通过OneNet平台PC端网页与移动端APP对服务器内的数据进行处理与展示。
2 系统硬件研究
数传终端主要采集当前施肥机位置、排肥轴实时转速等状态信息并发送至服务器,其主要由主控制器、无线通信模块、调试电路、CAN通信电路等部分组成。远程数据终端的主要硬件结构如图2所示。
本文研究的数据终端主控制器选用型号为STM32F103VET6的32位微型处理器,支持在72 MHz的工作频率和-40 ℃~85 ℃的工作环境下进行工作[8]。满足农业机械田间作业信息采集的工作要求。
2.1 电源电路
考虑到农机作业的环境特殊性,终端采用输出电压为DC5 V的独立电源供电,而主控制器工作电压为DC3.3 V,故电源电路采用AMS1117-3.3正向低压降稳压器进行电压转换,该款LDO最大输入电压为15 V,工作温度范围-40 ℃~125 ℃,输出电压DC3.3 V,满足工作需要。其结构如图3所示。
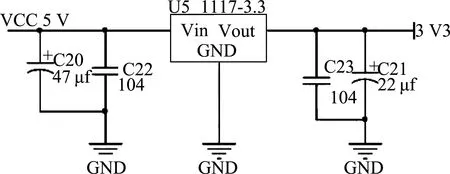
图3 电源转换电路
为提升系统可靠性,无线通信模块集成有单独的降压电路,电源为模块直接输入5 V的直流电压,通过RT9193-3.3低压差LDO电压调整器进行电压调节,其输入电压范围为1.6~6.0 V,输出电压为DC3.3 V,工作温度范围为-40 ℃~125 ℃[9],满足工作需要。其结构如图4所示。

图4 无线通信模块电源转换电路
2.2 CAN通信电路
施肥机上安装的传感器通过CAN通信线路将数据发送至数据终端,终端通过集成于其上的CAN通信电路实现CAN信号的接收,CAN通信电路的通信芯片采用TJA1050高速CAN收发器,工作温度范围为-40 ℃~150 ℃,最高通信速率500 kbps,拥有高速模式和静默模式两种工作模式,本研究通过将芯片的8号引脚直接接地使其处于高速模式下工作[10]。其结构如图5所示。

图5 CAN通信电路
2.3 无线通信模块研究
无线通信模块核心选用的是LTE BC20 NB-IoT/GNSS模组,贴片式封装,使用NB-IOT网络进行数据传输,通过内置的AT指令配置好IP与端口号实现向云端服务器传输数据,系统优先使用农机上已安装的定位系统数据,在未安装农机定位系统或系统发生故障时,可以通过通信模块上集成的GNSS天线实现北斗卫星定位系统定位,其结构如图6所示。

图6 BC20电路
模块通过串行数据接口与主控制器通信,其结构如图7所示。
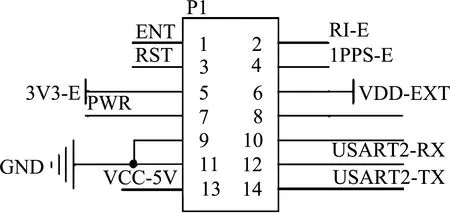
图7 BC20模块接口电路
2.4 感知层传感器
由于田间作业环境复杂,故传感器的选择应充分考虑其工作环境影响,需要有较高的可靠性、较小的体积以及较低的成本,经比较后转速传感器选用光电编码器,只需将其套在轴上,轴转动带动其内部的光栅盘转动,形成随转速变化的明暗交替,光电传感器将这种明暗交替的光信号转化为电信号,经处理后输出可用信号[11]。其测量精度为1 r/min,可靠性好。
施肥机坐标数据与速度数据的采集通过型号为GN181270的GNSS接收机实现,通过GPS卫星定位系统获取坐标数据与速度信息。其坐标数据精度为2.5 cm,测量的速度数据精度为0.001 km/h。
用于测量肥箱料位高度的传感器选用的是以STC89C52为核心的料位高度传感器,精度为3 mm。其原理为借助所测物体与空气介电常数值的不同导致传感器电容值变化这一规律,将电容值转化为电信号,通过转换电路形成CAN信号经CAN总线发出。
3 系统软件研究
3.1 终端软件研究
软件负责实现终端的数据采集、数据转换与封装、数据上传至云端等主要功能,系统上电后相关硬件初始化,向BC20模块发送连接指令,通过返回值来判断终端是否已连接至云端服务器,检测到CAN信号后将采集到的CAN数据ID值与程序设定的ID值进行对比,ID完全吻合后通过软件内算法进行数据解析,得到经纬度,速度等参数值,最后将解析好的数据按MQTT通讯协议的报文格式进行转换、封包,通过OneNet平台给出的固定IP上传至平台服务器。其流程如图8所示。
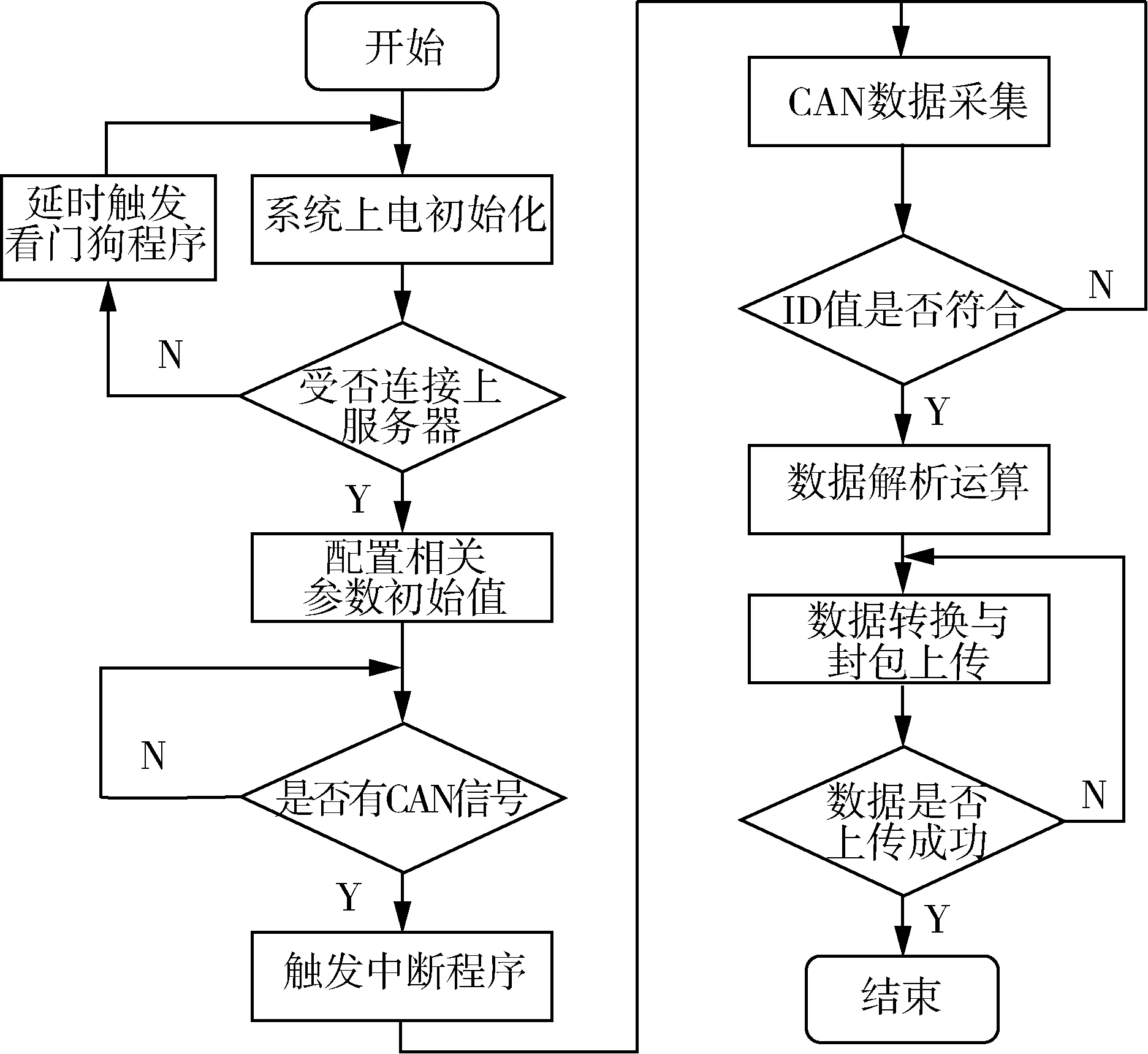
图8 软件运行流程图
施肥机与终端间数据传输通过CAN总线技术来实现,其通过两根信号线间的电压变化进行信息传递,结构简单,可靠性好,可同时将多个单元连接至总线之中,并具备自动对错误进行判断的功能,即自动隔离发生持续性错误的故障单元。系统中CAN通信格式遵循ISO11783标准。其报文格式如表1所示。
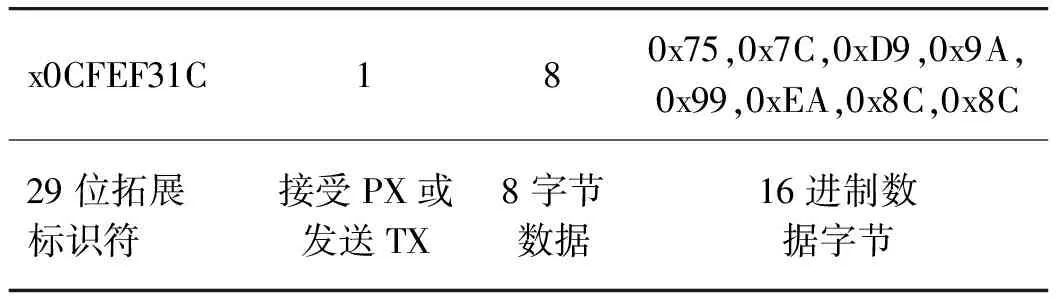
表1 CAN总线通信的报文格式
软件中CAN数据接收部分使用中断接收,这样不仅可以保证系统对CAN信号做出第一时间的反应与处理,更大大提升了主控制器的运行效率,其流程如图9所示。

图9 CAN数据接收与解析流程图
终端与云端服务器间的连接采用的是基于TCP的MQTT协议,其信息体结构由三个部分组成,即固定报头,可变报头与有效载荷[12]。其中可变报头与有效载荷并不是每条信息都必须含有的,其结构如表2所示。
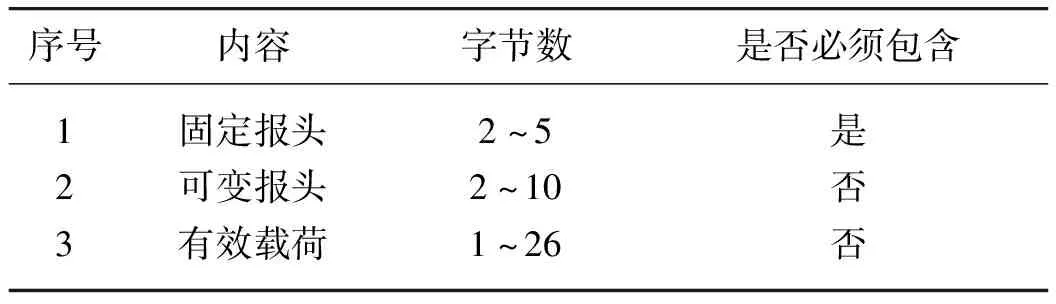
表2 MQTT协议的报文格式
系统上电后,终端向服务器发送一个连接报文,在服务器收到连接报文后会回复给终端一个连接请求确认报文,终端根据收到服务器回复的消息以确认是否已连接上服务器,向服务器发布消息后,服务器会向终端回复相应的发布收到报文,在终端长时间未发布消息时,终端会自动向服务器发送心跳请求报文以保证自己始终处于在线状态。其报文类型如表3所示。

表3 MQTT协议的报文类型
3.2 OneNet平台人机交互界面
将服务器端接收到的数据转换为可视化的图表,这一过程借助了OneNet平台提供的应用编辑器模组,将系统给定固定样式的模块拖入空白画布中,并在模块详情中对其对应展示的数据流和名称等参数进行设定,最后将编辑好的应用保存并发布,这样就可以通过OneNet平台PC端网页和移动端APP进行访问与查看,移动端的数据查看主要通过OneNet平台的官方APP实现。OneNet平台的使用大大缩短了交互界面开发时间,降低了开发难度。人机交互界面可实时查看当前的坐标数据、转速值、速度值、料位高度及过往的变化曲线,通过界面左上角的地图可直观的查看施肥机的实时位置,并且在右上角还会显示系统的最后在线时间。用户界面详情如图10所示。
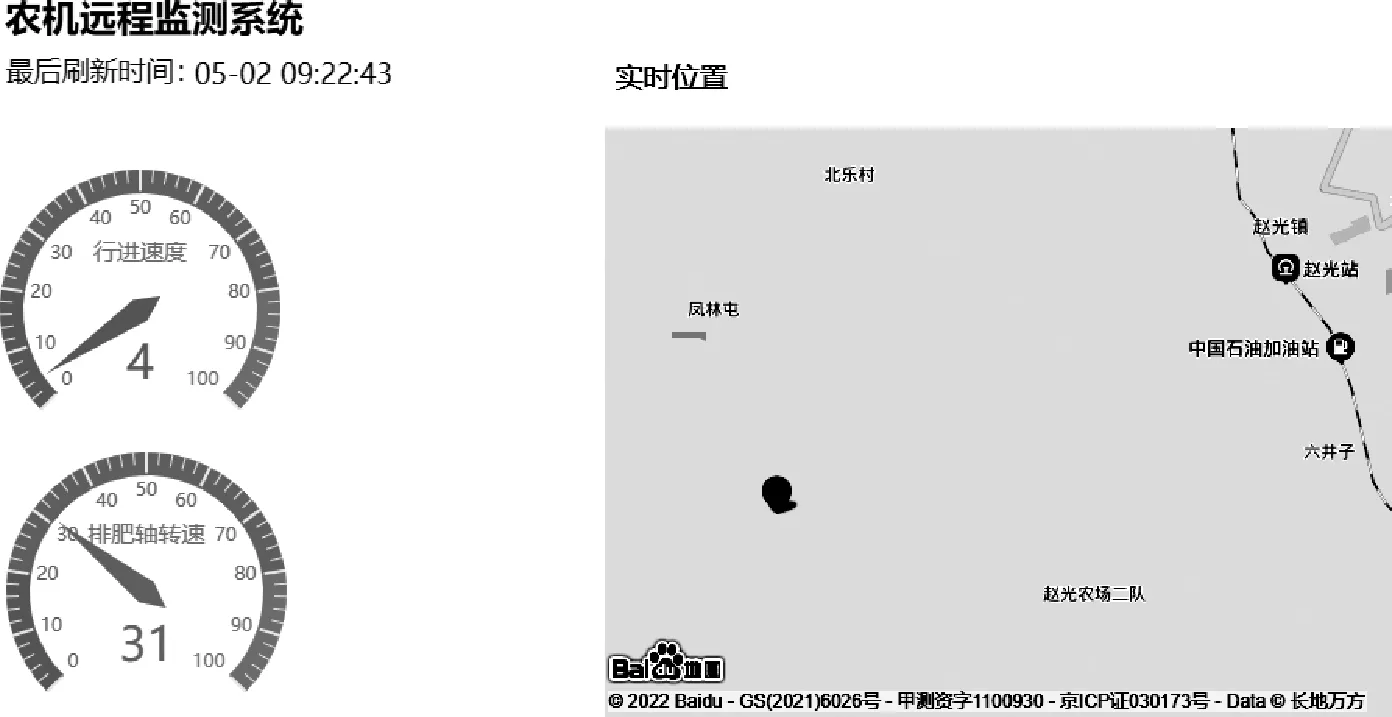
图10 OneNet人机交互界面
OneNet平台会对用户上传的数据进行保存,容量不限,可免费存储一年。通过数据流界面可对设定时间段的数据进行导出,方便用户进行数据的进一步的处理与查看。
4 系统测试
将写好的程序输入单片机中,终端与写入CAN记录文件的CAN记录回放仪连接,之后进行系统通电。通过CAN记录回放仪的指示灯确认终端已接收到数据,登录OneNet平台进行查看,系统工作正常。
测试台架由AC220 V转DC12 V与DC5 V的双输出电源分别为CAN记录回放仪和终端进行供电,CAN记录回放仪中的记录文件是2019年10月16日于赵光农场的施肥作业的CAN信号记录,数据量充足,可以十分逼真的模拟实际田间作业时的数据环境。测试用台架如图11所示。

图11 系统测试台架
通过测试台架对终端进行五次每次约6 h的系统测试后,系统感知层传感器获取的部分数据以及经其换算得到的瞬时施肥量数据如表4所示。记录文件中共有21 997组有效目标数据。
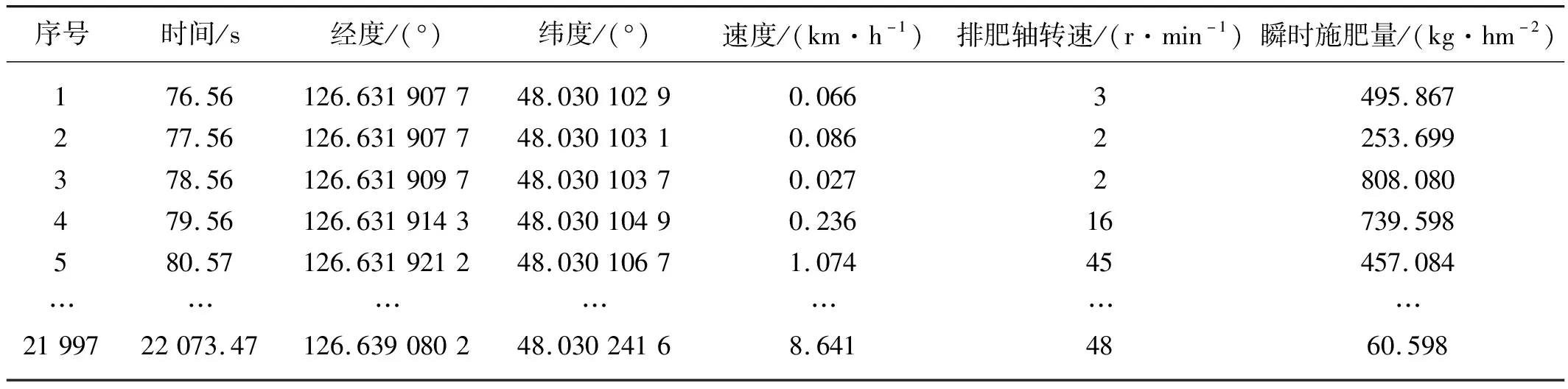
表4 感知层采集参数表
终端串口打印CAN接收记录、OneNet平台导出的历史数据与CAN回放仪中CAN记录文件的对比得到以下数据:状态数据CAN线路传输成功率最低为98.8%,无线模块上传成功率最低为95.11%,整体丢包率小于5%,平均延时为300 ms左右,如表5所示,满足工作要求。
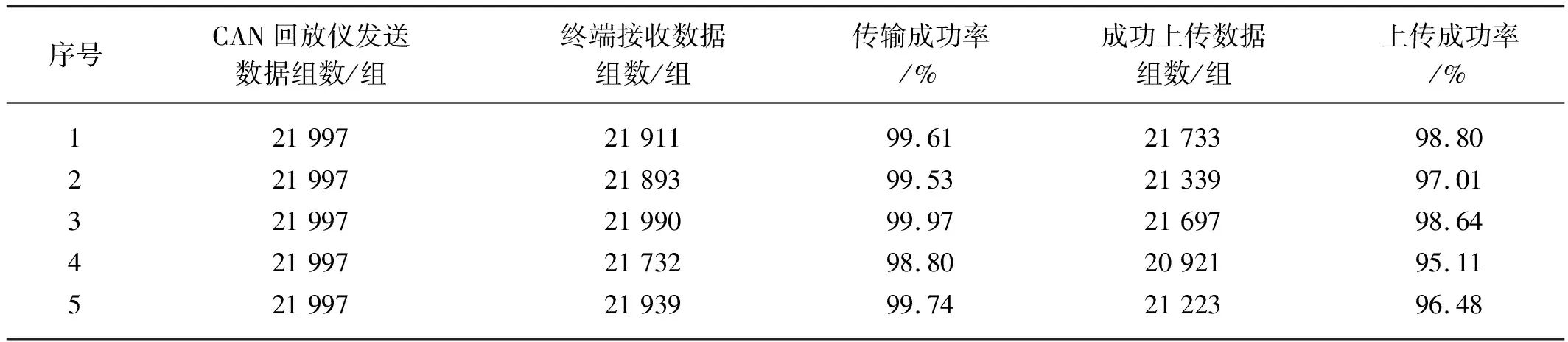
表5 数据传输上传测试表
5 结论
1)研究一种用于监测玉米中耕变量施肥机实时位置与实时参数的物联网监测系统。结合工作需求完成了终端电路的设计。
2)深入分析CAN通信协议及MQTT通信协议将两者结合完成了软件的编写,并借助OneNet平台完成了用户界面开发与数据的保存与调用。
3)经测试,系统可以平稳运行,可靠性较高,传感器每分钟采集60组参数,并且整体丢包率小于5%,平均延时约为300 ms,满足工作需要。
4)由于使用CAN总线技术,系统可接入多种设备,拓展性较好。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
电子乐园·上旬刊(2022年5期)2022-04-09
高考·中(2020年2期)2020-09-10
农民致富之友(2020年16期)2020-06-19
农民致富之友(2020年14期)2020-05-25
农民致富之友(2020年14期)2020-05-25
农民致富之友(2019年17期)2019-07-01
中国计算机报(2018年12期)2018-10-08
理科考试研究·初中(2017年4期)2017-11-04
网络与信息(2009年4期)2009-04-26