仿生几何结构表面深松铲铲尖设计与试验*
2022-02-25 02:40王晓阳潘睿强华张智泓武时会薛忠
中国农机化学报 2022年1期
王晓阳,潘睿,强华,张智泓,武时会,薛忠, 4
(1.重庆人文科技学院机电与信息工程学院,重庆市,401524;2.中国热带农业科学院农业机械研究所,广东湛江,524091;3.昆明理工大学现代农业工程学院,昆明市,650500;4.中国热带农业科学院南亚热带作物研究所,广东湛江,524091)
0 引言
针对北方旱作区保护性耕作技术的研究,从优化机具关键部件、农机农艺融合等方面已经获得了相应的解决方法[1]。李洪文等[2]通过优化机具,设计出可调翼铲式深松机,能够适用于地表不平、种床较差的耕作环境。针对南方红壤土保护性耕作的研究,深松技术研究较少,实际还处于浅耕。机械化深松技术主要取决于研究大功率拖拉机相配套的高效和高强度的机具。高强度机具研究中,对于深松铲在深松过程中的受力分析研究发现,深松铲受力位置主要在深松铲铲尖和铲柄,由于工作过程中存在配套动力不足和耕作阻力大的难题[3],传统深松机具的设计已经无法满足减阻要求,设计具有优异减阻性能的仿生几何结构表面成为了地面机械触土部件高效减阻研究的发展趋势[4]。
仿生学的研究对于解决工程实际中阻力大的问题具有重要影响[5]。杨玉婉等[6]通过研究鼹鼠多趾结构,设计出具有良好性能的仿生切土刀片。郭志军等[7-8]对田鼠爪趾轮廓线进行研究,通过改变轮廓曲线的曲率,设计了9种减阻性能较优的仿生曲面推土板。马云海等[9]对獾爪趾的表面曲线进行研究,将获得的拟合曲线方程运用到挖掘机斗齿,设计出具有优异减阻性能的仿生几何结构的斗齿。结合西南地区机耕面积呈逐年增加的趋势,针对长期的牲畜耕作导致土壤板结严重,紧实易板结[10],红壤土黏附力大,深松过程中土壤黏附严重,耕作阻力大等难题,研究解决西南地区红壤土在传统深松耕作过程中阻力大的难题,具有重要的现实意义。本研究采用工程仿生[11]的方法,利用洞穴类生物与土壤相互作用具备的优异减阻特性,优化设计出具有优异减阻特性的深松铲铲尖,解决了西南地区深松机具耕作过程中阻力大的难题。
1 仿生几何结构表面深松铲铲尖设计
1.1 仿生材料与提取方法
克氏原螯虾生活在湿润环境中与土壤接触后具有不黏土特性,运动中阻力较小;砂鱼蜥生活在含水率较低的沙粒中,在土壤中能够快速的游动,具有较优的减阻特性。克氏原螯虾[12]和砂鱼蜥[13]的生存环境以及其在运动过程中具备的减阻特性,为仿生原型的选择提供了理论研究基础。
根据Raabe[14-16]、Sachs[17]和Romano[18]等对克氏原螯虾的试验研究以及Staudt等[19]对砂鱼蜥表皮的试验结果,通过扫描电镜进一步微观观察,如图1所示,发现克氏原螯虾主要减阻部位是头胸部外骨骼微刺—凸包几何结构,砂鱼蜥背部体表主要耐磨表面是微刺—鳞片几何表面。通过扫描电镜观察,如图2所示,获得扫描电镜微观结构。

(a)克氏原螯虾

(a)微刺—凸包
将两者仿生结构和表面进行耦合设计,获得具有优异减阻性能的仿生几何结构表面,通过优化设计研究,将设计的仿生几何结构表面运动到深松铲铲尖,进行试验考察其减阻性能。
1.2 仿生结构设计
基于克氏原螯虾表面的微刺—凸包几何结构和砂鱼蜥体表微刺—鳞片几何表面。Soni等[20-21]设计了不同尺寸的凸包单元,引入了高径比(HDR)作为描述凸包形状的参数,将凸包单元安装于铧式犁,使用自行设计的试验台测试其前进阻力和法向黏附力,结果表明,HDR≤0.5的凸包单元可降低10%~30%的前进阻力和10%~60%的法向黏附力。本设计以高径比(HDR)作为参数选择原则,结合微观观察尺寸结构,设计凸包尺寸底部直径为12 mm,高度为1.8 mm。微刺设计参考凸包设计原则,设计微刺高度为1.8 mm,厚度为0.5 mm,为使仿生面积占比均匀,设计的仿生几何结构表面积占深松铲铲尖表面积的占比在45%~55%之间。本文设计的6种铲尖中,传统铲尖a参照JB/T 9788—1999进行设计,参数如图3所示。优化设计出仿生凸包几何结构表面铲尖、仿生微刺—凸包几何结构表面铲尖、仿生鳞片表面铲尖、仿生微刺—鳞片表面铲尖、仿生微刺—凸包—鳞片混合表面铲尖。将6种表面的铲尖定义为a、b、c、d、e、f,如图4所示。其中微刺—凸包,微刺—鳞片仿生结构表面部分尺寸如图5所示。仿生铲尖b表面为凸包结构,仿生铲尖c表面为微刺—凸包结构,仿生铲尖d表面为鳞片表面,仿生铲尖e表面为微刺—鳞片表面,仿生铲尖f表面为微刺—凸包结构和微刺鳞片表面混合的表面结构。本设计通过保证仿生结构表面在传统表面的表面积占比近似,避免了由于仿生面积占比不均匀导致误差较大。同时为保证加工精度及对比的准确性,6种铲尖加工制造均采用PLA聚乳酸材料3D打印成型。PLA聚乳酸材料具有较强的拉伸性能,冲击强度方面性能显著,绿色环保[22]。
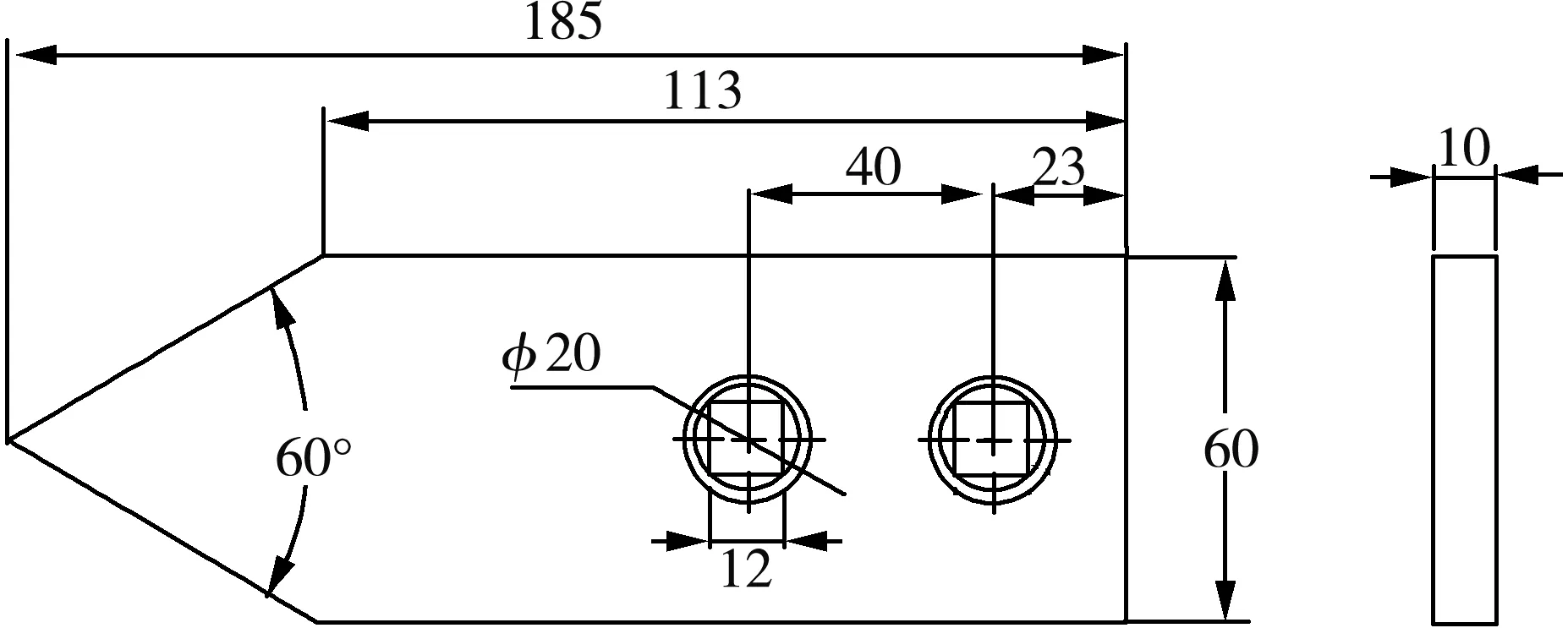
图3 传统深松铲铲尖

图4 6种三维铲尖模型
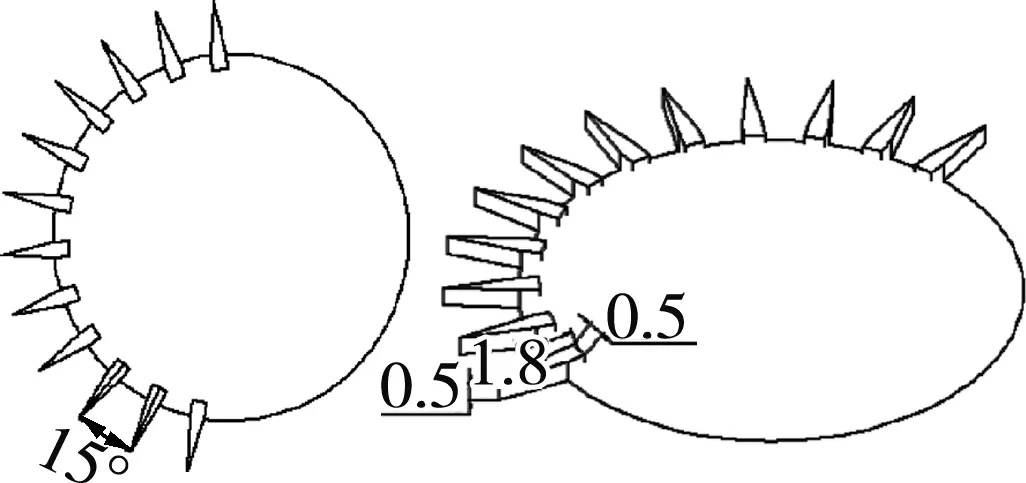
(a)微刺—凸包
2 土槽试验
2.1 试验平台搭建
本试验在昆明理工大学现代农业工程学院完成,土槽试验的土壤选择云南地区耕作后的红壤土,试验过程中每次对土壤进行镇压处理,以保证土壤坚实度,减少对试验造成的误差。
试验平台采用BELS-2S型拉力传感器和BSFY-1型信号放大器,Arduino开发板,SD卡模块、SD卡以及笔记本电脑作为数据采集系统的硬件装置,软件系统采用Arduino软件系统,通过在Arduino系统中编写拉力传感器受力采集程序,获得在耕作过程中受到的牵引阻力。Arduino开发板和SD卡模块,如图6所示;测力系统,深松铲与拉力传感器连接示意图,如图7所示。测试系统通过在Arduino软件中编写数据采集程序,在串口监测窗口通过观测电压输出,根据输出值与力值的比例关系,换算获得相对应的受力值。
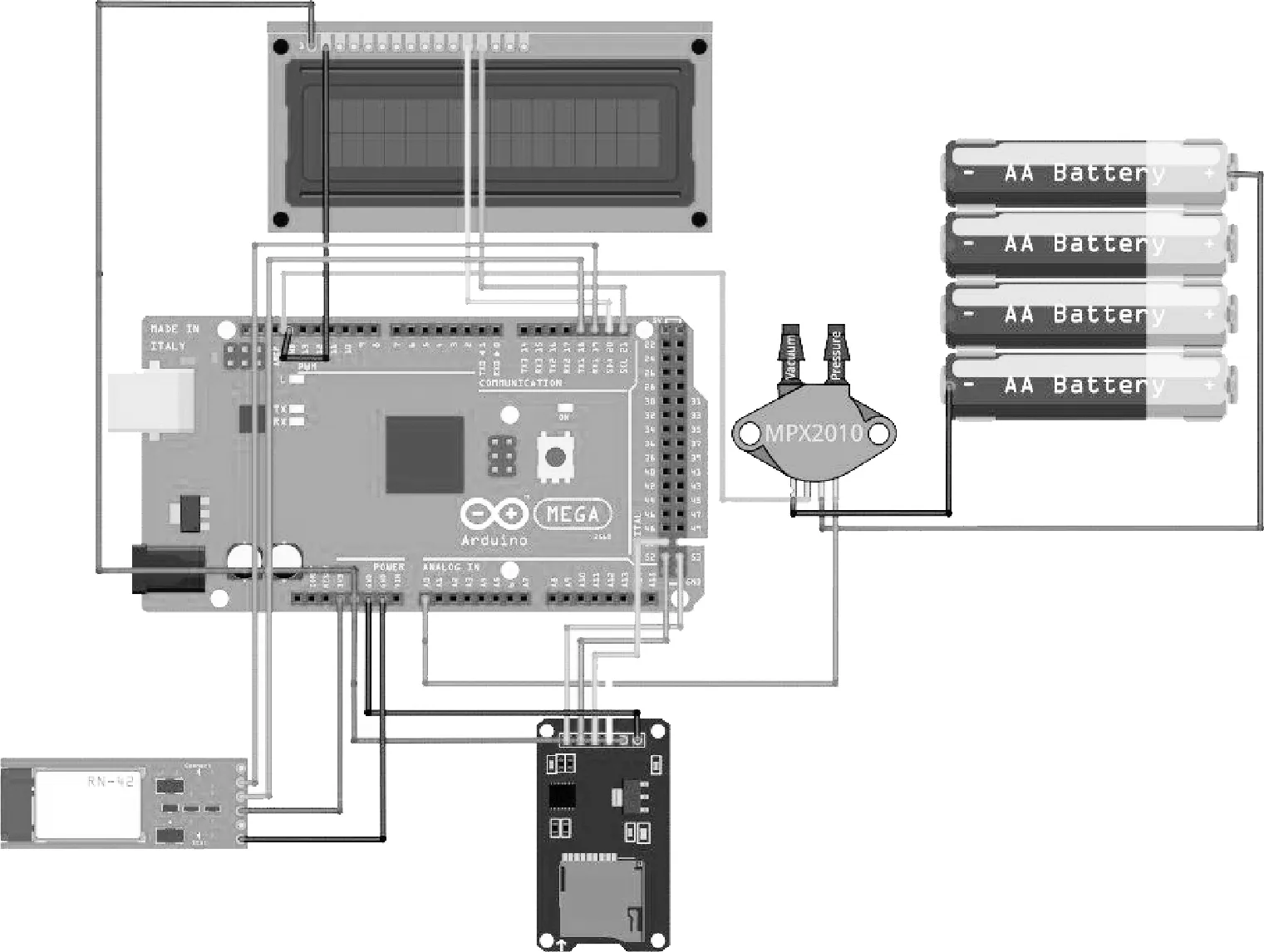
图6 SD卡模块和开发板接线图
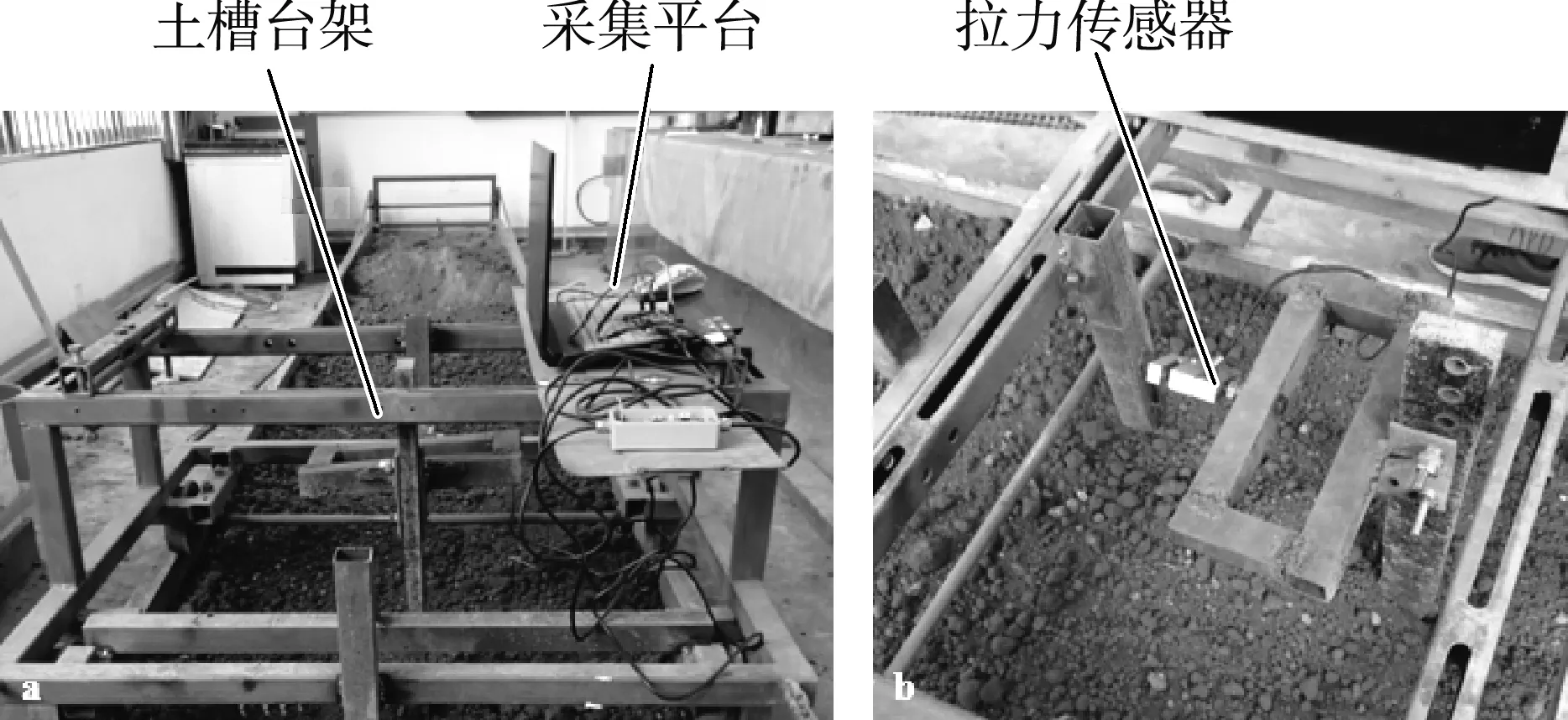
图7 测力系统
2.2 试验方法
本试验基于Arduino软件系统,利用Arduino开发板编写了可以采集电压的程序,通过监测电压输出,将电压值采集到SD卡中,从而获得在耕作过程中连续受到的牵引阻力。试验选取相同深松深度,在两种不同含水率的情况下,对比6种不同表面的铲尖在3种牵引速度情况下,深松铲在工作过程中受到的牵引阻力,每组牵引阻力试验进行5次,取5次牵引阻力的平均值为不同水平试验条件下所受牵引阻力。
2.3 牵引阻力分析
通过土槽试验,测试在深松深度为250 mm的情况下,选用含水率为18.11%和12.57%,6种不同结构表面的铲尖在3种深松速度下的牵引阻力,测试结果如表1所示。
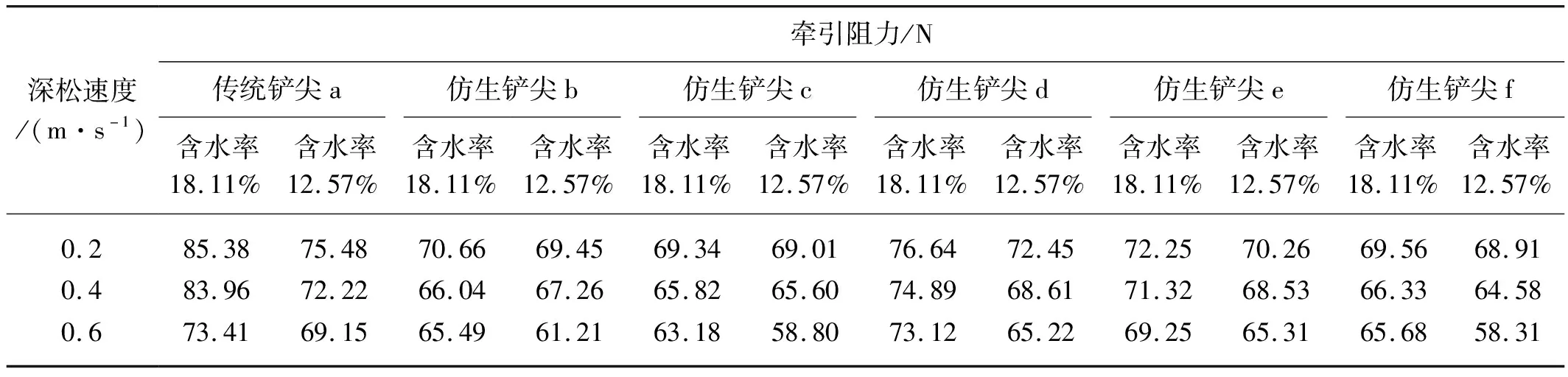
表1 6种铲尖的牵引阻力值
1)当含水率为18.11%时,随着深松速度的增加,相同表面的铲尖牵引阻力呈逐渐减小的趋势。在深松速度相同的条件下,由于铲尖不同的表面结构,改变了深松铲铲尖与土壤的相互作用的受力关系,产生了不同的牵引阻力。深松速度为0.4 m/s时,6种结构表面的铲尖产生的牵引阻力值波动最大。
当含水率为18.11%时,深松速度相同的情况下,对比传统铲尖a,可以观察到,仿生铲尖c受到的牵引阻力最小;仿生铲尖b较仿生铲尖f的减阻能力较弱,仿生铲尖d和仿生铲尖e的减阻能力最小。结合克氏原螯虾在较高含水率的情况下,利用体表微刺—凸包结构与土壤相互作用,表现出优异的减阻特性,优化设计了具有微刺—凸包结构、减阻性能较强的仿生铲尖c。
2)当含水率为12.57%时,随着深松速度的增加,相同表面的铲尖牵引阻力呈逐渐减小的趋势,与含水率为18.11%时情况相似。在相同深松速度的条件下,与含水率为18.11%时铲尖牵引阻力值波动情况对比,可以得到含水率较低时,具有不同结构表面的深松铲铲尖牵引阻力值同样具有较大的波动。与含水率为18.11%时铲尖牵引阻力值波动情况不同点在于波动最大情况出现在深松速度为0.6 m/s时,出现此种现象的原因是,相对于含水率为18.11%,含水率降低后微刺—鳞片表面体现出优异的减阻特性,设计的微刺—鳞片表面利用砂鱼蜥在含水率较低时,较高的爬行速度下体表优异的减阻特性。
当含水率为12.57%时,在相同深松速度的情况下,与传统铲尖a对比,仿生铲尖f受到的牵引阻力最小,其次是仿生铲尖c,仿生铲尖b较仿生铲尖c的减阻能力较弱,仿生铲尖d、e的减阻能力最小。产生此种现象的原因是与含水率为18.11%对比,此时含水率降低,微刺—鳞片表面表现出较优的减阻特性,通过对比5种仿生铲尖,可以看出从凸包结构到微刺—凸包结构,鳞片表面到微刺—鳞片表面的减阻特性逐渐增强。在含水率为12.57%时,具有仿生微刺—凸包—鳞片表面混合铲尖减阻能力最优。
2.4 降阻率分析
深松深度为250 mm时,以传统铲尖a受到的牵引阻力为基准,计算不同含水率和深松速度条件下降阻效率如式(1)所示。通过计算可得到在两种含水率,3种深松速度情况下,5种仿生几何结构表面铲尖的降阻率,如表2所示。
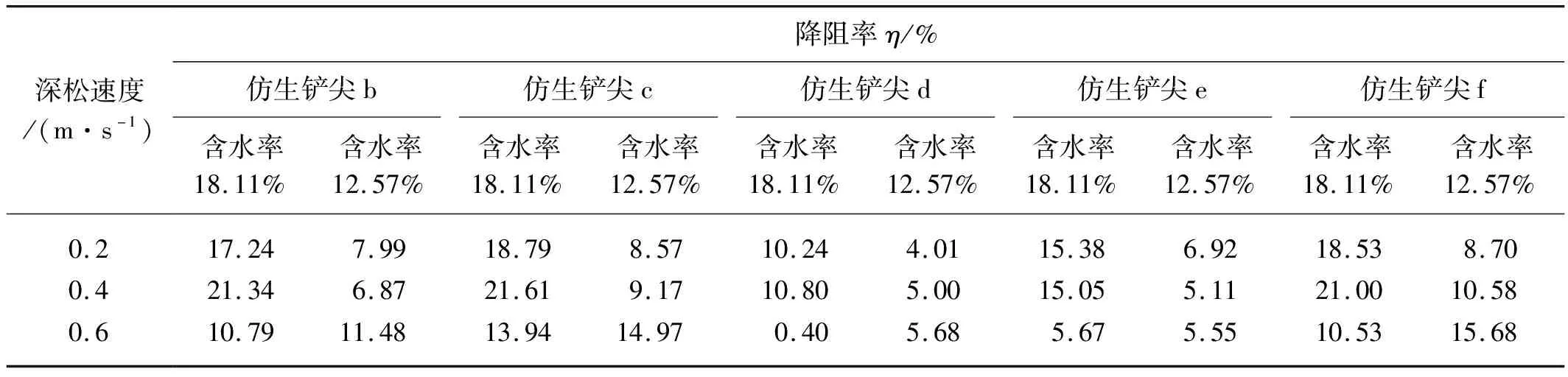
表2 仿生几何结构表面铲尖降阻率
(1)
式中:F——传统铲尖牵引阻力;
F0——具有仿生结构表面铲尖的牵引阻力。
由表2可以看出,3种深松速度条件下,仿生铲尖c和仿生铲尖f的降阻率较高;含水率为18.11%时,仿生铲尖c的降阻率优于仿生铲尖f,在牵引速度为0.2 m/s时,深松铲受到的牵引阻力较大,仿生铲尖c的降阻率最优;含水率为12.57%时,仿生铲尖f的降阻率优于仿生铲尖c,在牵引速度为0.6 m/s时,牵引阻力随着深松速度的增加逐渐降低,仿生铲尖f的降阻率最优。
分析两种含水率条件下,不同仿生几何结构表面的深松铲铲尖的降阻率,可以得到:含水率较高的情况下,土壤水分较多,微刺—凸包几何结构的减阻特性较为明显;含水率较低的情况下,微刺—鳞片表面减阻特性较为显著;对比单独的凸包结构和鳞片结构,反映出微刺结构在减阻效果上起到增强特性,并且随着含水率的改变,从微刺—凸包结构过渡到微刺—鳞片,仿生几何结构表面减阻特性逐渐改变。考虑到西南地区土壤特性,在含水率较低的情况下,具有微刺—凸包—鳞片混合表面结构的铲尖减阻能力较优。
从表2可以看出,含水率较高时,具有微刺—凸包几何结构表面铲尖具有最优的减阻能力,其次是微刺—凸包—鳞片混合表面铲尖;随着深松速度的增加,微刺—凸包几何结构表面铲尖体现出减阻能力明显优于微刺—凸包—鳞片混合表面铲尖的性能;含水率较低时,具有微刺—凸包—鳞片混合表面的铲尖与微刺—凸包几何结构表面铲尖具有较优的减阻能力,具有微刺—凸包—鳞片混合表面的铲尖在减阻性能上略优于微刺—凸包几何结构表面铲尖。
2.5 铲尖黏附土壤观察分析
从宏观角度观察试验后的6种结构表面的铲尖,如图8所示。从图8可以观察到铲尖表面微刺处积聚有土壤,由于微刺为分叉几何结构,在与土壤作用过程中,土壤会优先作用于微刺结构,并积聚在微刺处,形成对于深松铲铲尖表面的土壤覆盖层,因此会减少表面与土壤的相互作用力,从而降低了铲尖表面与土壤的相互作用力,达到了仿生几何结构表面铲尖减阻优于传统铲尖的试验效果。试验后的铲尖表面黏附的土壤多集中在仿生几何结构的前半部分,后半部分黏附土壤较少,分析可得前半部分在积聚土壤的过程中,降低了铲尖对后半部分的土壤黏附,与传统铲尖表面直接接触土壤相比,降低了与土壤黏附的表面积,降低土壤颗粒之间的相互作用力,达到了减阻的效果。
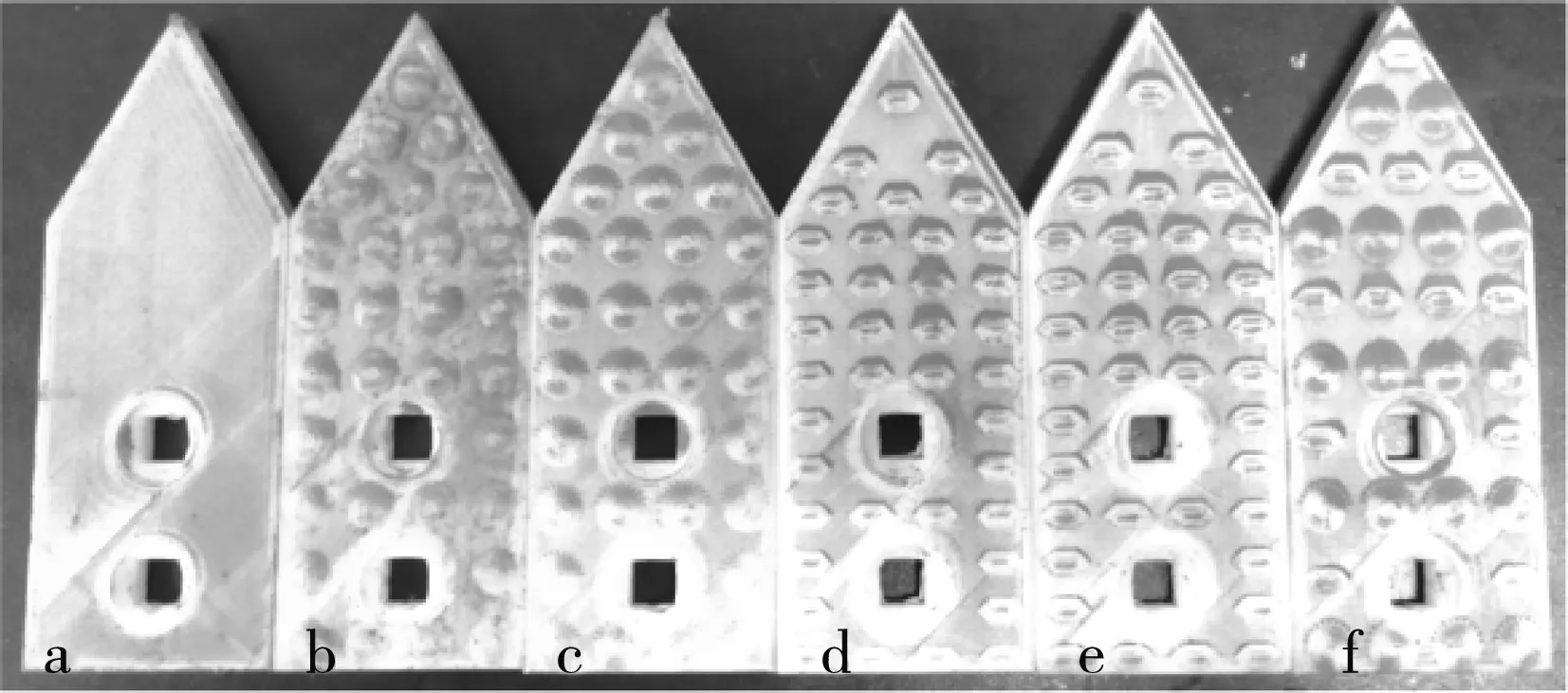
图8 6种铲尖土壤黏附照片
3 结论
1)根据克氏原螯虾和砂鱼蜥的生存环境以及体表具备的优异减阻性能,引入了高径比(HDR)参数选择原则,设计出凸包尺寸底部直径为12 mm,高度为1.8 mm;微刺高度为1.8 mm,厚度为0.5 mm。优化设计出仿生凸包几何结构表面铲尖、仿生微刺—凸包几何结构表面铲尖、仿生鳞片表面铲尖、仿生微刺—鳞片表面铲尖、仿生微刺—凸包—鳞片表面混合铲尖。
2)相同深松深度下,含水率为12.57%和18.11%,耕作速度为0.2 m/s、0.4 m/s和0.6 m/s情况下,测试5种具有仿生几何结构表面的铲尖在深松耕作过程中受到的牵引阻力。根据试验结果分析可得,具有耦合仿生表面结构的仿生微刺—凸包几何结构表面铲尖、仿生微刺—凸包—鳞片混合表面铲尖具有较优的减阻能力。与传统铲尖相比,优化设计的耦合仿生几何结构表面铲尖具有较高的降阻率,在含水率为18.11%,深松速度为0.4 m/s时,具有仿生微刺—凸包结构的铲尖c牵引阻力值为65.82 N,降阻率最大达到20%以上;在含水率为12.57%,深松速度为0.6 m/s时,具有仿生微刺—凸包—鳞片表面混合铲尖f牵引阻力值为58.31 N,降阻率达到15%以上,表面含水率较低时,仿生微刺—鳞片表面具有较优减阻特性。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
汽车实用技术(2022年5期)2022-04-02
上海船舶运输科学研究所学报(2021年2期)2021-10-12
疯狂英语·读写版(2021年8期)2021-09-17
作文周刊·小学一年级版(2020年8期)2020-05-11
作文大王·低年级(2020年4期)2020-04-19
阅读与作文(小学低年级版)(2019年12期)2019-12-26
人民长江(2019年7期)2019-09-10
阅读与作文(初中版)(2016年4期)2016-11-19
科学与财富(2016年6期)2016-05-14