小型陆空两栖系统控制及模式转换
2022-02-24 12:50:14郭磊李波
科学技术与工程 2022年3期
郭磊, 李波
(中北大学机电工程学院, 太原 030051)
陆空两栖无人系统,是一种既可以在地面行驶又可在空中飞行的新型机动工具,兼具车辆与飞行器的复合机动优势,中外军事和民用领域都在进行概念研究[1-2]。对于陆空两栖无人系统的研究,国外研究较早并取得突破,美国等技术相对领先的国家早已将陆空两栖无人系统的相关技术应用到生产、生活以及军事上,国外研制的陆空两栖飞行器在装满燃料时,能够持续400 km空中或陆地运输[3]。中国也有部分团队对陆空两栖系统进行了深入研究,如深圳哈威科技设计了一款两栖微型个人飞行器。文献[4-7]主要针对地面越障机构进行研究,实现了轮式、履带式、仿生腿式的地面机构设计,但其中设计的空中传动系统多固定为四、六旋翼。文献[8]对两栖系统的四旋翼提出了一种可伸展式结构,在飞行模式时展开旋翼飞行,在陆地行驶时,四旋翼收合进行避障,提高了系统的灵活性。文献[9-10]对已有陆空两栖无人系统的关键技术及难点作出了总结,对空中模式驱动系统的多样性提出了需求,对未来陆空两栖无人系统的实际应用和发展做出了进一步展望。
为实现小型陆空系统两种运行模式的控制转换及其侦查避障功能,提出一种能够将共轴反转式旋翼应用在陆空两栖无人系统上的空中驱动结构,并设计一种能够基于该结构的自主模式转换运行的控制系统。设计陆空运行模式下的串级PID (proportion integral differential)控制系统,通过stateflow模块完成任务调度,实现陆空模式的控制转换仿真。系统同时控制陆空两种模式下的决策,相互独立又能互相转换,具有能耗低、集成度高、可扩展性强等特点。
1 系统总体构建
1.1 结构设计
两栖无人系统的飞行结构构型的选择是对空中系统的外形,旋翼的形式和布置方式以及传动机构以及其他部件的位置进行选择和布置,以满足任务技术要求。空中系统的构型一般主要根据旋翼的数量、布置位置和平衡旋翼反扭矩的方式以及机身的布局形式进行区分。
考虑到陆空两栖系统的灵活性需求[11-12],从机械结构出发,设计一种可伸展式共轴双旋翼驱动机构,如图1所示,设计能够减少系统在非飞行状态下的体积结构大小,增大了在陆地模式下可通过的区域。在地面运行模式下,旋翼受重力作用自然下落,通过旋转驱动组件和限位盘的设置使连接轴与车体表面贴合。飞行模式下,连接轴复位,传动轴带动旋翼旋转,产生的升力带动旋翼完成展开。
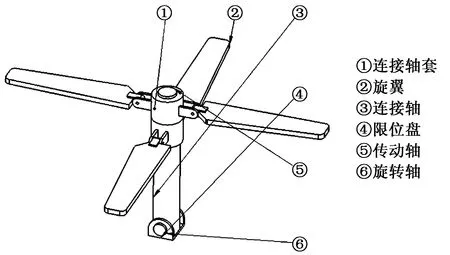
图1 旋翼驱动机构
陆地运行模式下,综合考虑本设计的应用场景、功能需求,大部分任务时间都是在城市道路环境下执行任务,且由于其两栖系统的特殊性,不需要具备较高的越障能力,因此选择轮式驱动即实现地面稳定运行,且结构简单。通过三维建模软件建立的整体设计模型如图2所示。
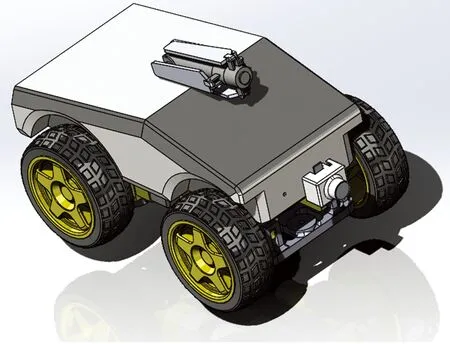
图2 两栖系统模型
1.2 控制原理
为使系统到达设定的目标位置,并在运行过程中通过陆空模式转换实现障碍物的穿越,需要设计完整的控制系统,控制系统框图如图3所示。其中位置检测与判断模块由气压计和加速度计组成,判断系统当前所处的陆空模式以及计算得到系统完成的位移。模式判断与转换模块由多方位超声波传感器组成[13],在气压计、陀螺仪、加速度计等多传感器信号融合下完成模式判断,在探测到障碍物信号后,向执行机构发出转换信号。PID控制模块由陆、空两种PID控制组成,分别控制空中运动状态下的飞行高度、位姿等和陆地运动状态下的位移、方向等。执行机构由空中系统的旋翼和地面系统的车轮组成,保障了整体系统的驱动运行。系统位姿由系统运行时的外部空间状态组成[14-16],由多传感器采集处理反馈到整体系统,实现系统的完整闭环控制。

图3 控制系统框图
1.3 模式转换
为实现陆空控制的一体化,需要在模式判断中加入相应的控制,通过集成的惯性导航单元(inertial measurement unit,IMU)及超声波传感器共同实现。在两种模式下,需要特定的信号传递给控制系统,系统才能完成空陆或陆空模式的转换。
2 运动学分析
陆空两栖系统的共轴双旋翼模型在空中飞行过程中,其运动有6个自由度:前后(进退运动);上下(升降运动);左右(侧向移动);俯仰运动;偏航运动;滚转运动。前三个反映了系统的中心运动,即线运动;后三个反映了系统绕重心的运动,即角运动。
根据旋翼的叶素理论[12],高度方向上可将受力简化为除重力和升力外不受其他力,同时不考虑翼型的影响,旋翼受到拉力F为
(1)
式(1)中:χ为叶端损失系数;KT为拉力修正系数,σ为旋翼实度;C为旋桨的升力系数。
将单旋翼模型的绝对速度v按机体坐标系分解,建立模型在x、y、z三轴下的线运动方程,即
(2)
式(2)中:u、v、ω分别为单旋翼模型空速在x、y和z轴上的投影;p、q和r为系统绕x、y和z轴的角速度;m为系统整体的质量。
为了描述系统相对于地面的运动,还需要对系统在空中运行的姿态进行分析,如图4所示,分别为俯仰、横滚、偏航运动,得到各运动与系统间的角运动方程为
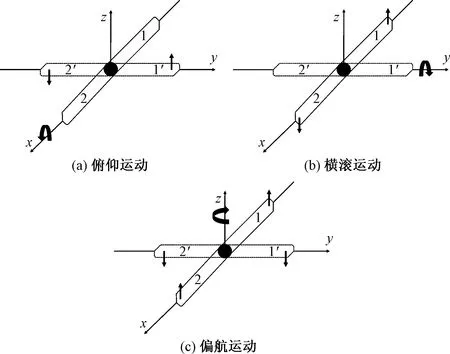
图4 系统飞行姿态
(3)
式(3)中:θ、φ、ψ分别为横滚角、俯仰角和偏航角。
通过空地坐标系转换,得到地面坐标系下,系统空中运动控制公式为
(4)
地面运行状态下,系统运行状态如图5所示,在地面坐标系(x0,y0)上建立车体坐标系,车体坐标系(x1,y1)的原点O1的坐标为(X,Y)。二自由度车体运动学模型公式为
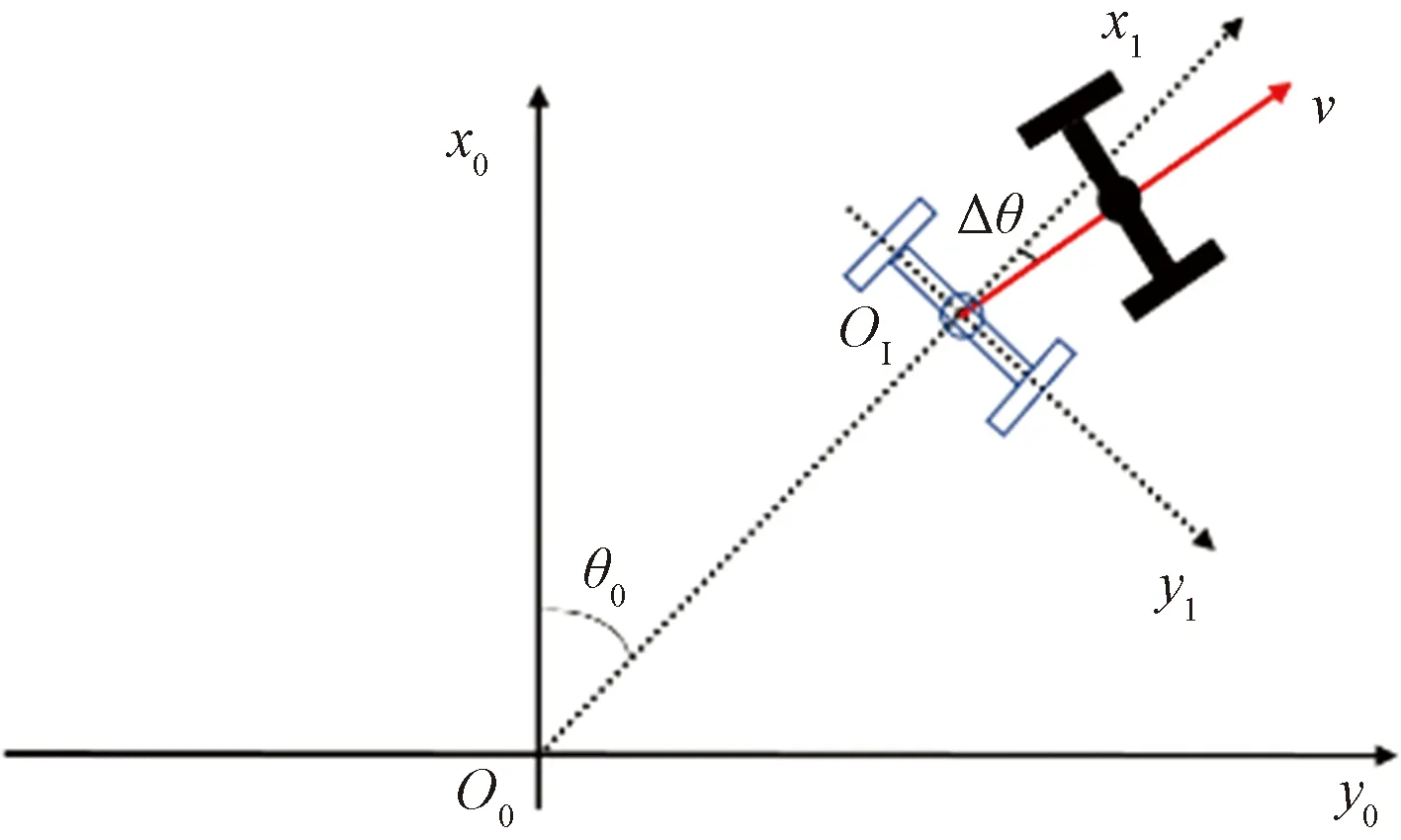
图5 陆地运动模型
(5)
经坐标转换计算得到系统的陆地运动控制方程为
(6)
式(6)中:θ0为坐标系转换的角度。
根据陆空系统的运动模型得到系统在空中飞行与地面行驶模式下与外部姿态间的关系,通过系统运动与姿态控制量关系完成控制部分的研究与设计。
3 控制设计
将两栖系统的控制系统分为陆地控制、空中控制以及模式转换控制,其中各系统间的联系如图6所示。设计采用串级PID控制,采用两个控制器串联,外环控制器的输出作为内环控制器的输入,内环控制器的输出控制整个系统,使得外环被控量得到更好的控制效果。串级控制系统在结构上仅仅比简单控制系统多了一个内环回路,实践证明,对于相同的干扰,串级控制系统的控制质量是简单控制系统无法比拟的。外环回路是一个定值控制系统,内环回路可看成是一个随动控制回路。外环控制器按负荷和操作条件的变化不断纠正内环控制器的设定值,使内环控制器的设定值适应负荷和操作条件的变化。如果对象中有较大非线性的部分包含到了内环回路中,则负荷和操作条件变化时,必然使内环回路的工作点移动而影响其稳定性。在串级结构中,内环回路的变化对整个系统的稳定性影响很小,所以从这个意义上说,串级控制系统能够适应不同负荷和操作条件的变化。其优势在于:
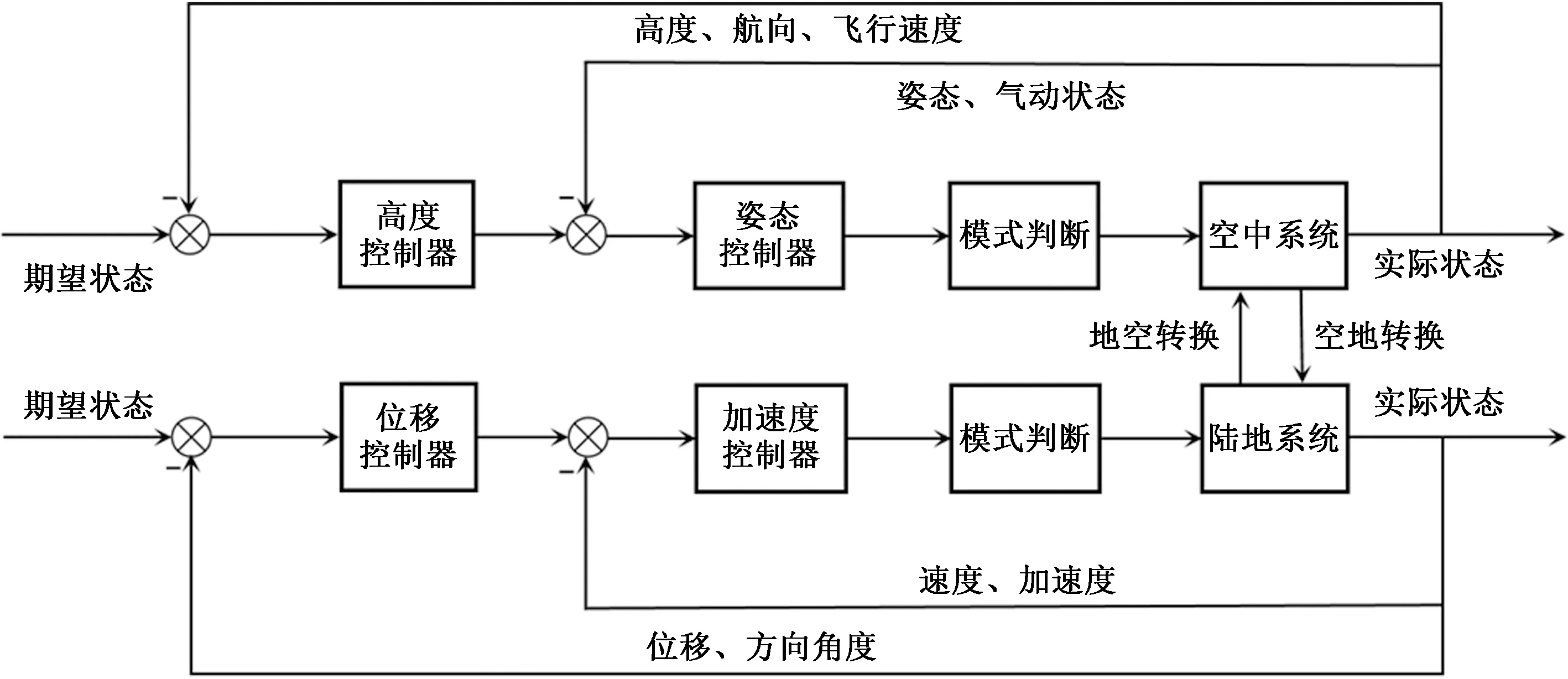
图6 系统控制原理图
(1)由于内环回路的存在,改变了原来的对象特性,使内环回路对象的等效时间常数变小,所以使系统的过渡时间缩短了,控制作用更加及时。
(2)改善了对象特征,起到超前控制的作用,有效抑制内环回路干扰,这种超前控制作用最适合干扰落在内环回路内的情况,若干扰落在外环回路时,超前作用就不明显了。
(3)提高了系统的工作频率,使振荡周期减小,调节时间缩短,系统的快速性增强。
(4)当模型失配时,内环控制器可以很好地抑制干扰,而外环控制器则以良好的动态性能和鲁棒性能为设计目标。
(5)由于串级控制系统的内环是一个随动控制系统,它的设定值随着外环控制器的输出而变化。外环控制器可以按照操作条件和负荷的变化情况,不断调整内环控制器的设定值,从而保证在操作条件和负荷发生变化的情况下,控制系统仍有较好的控制效果。
空中控制系统根据式(4)空中运动模型与外部姿态间的关系,完成空中PID控制算法设计,如图7所示。其中飞行控制系统的传感器及机载测量系统包含:
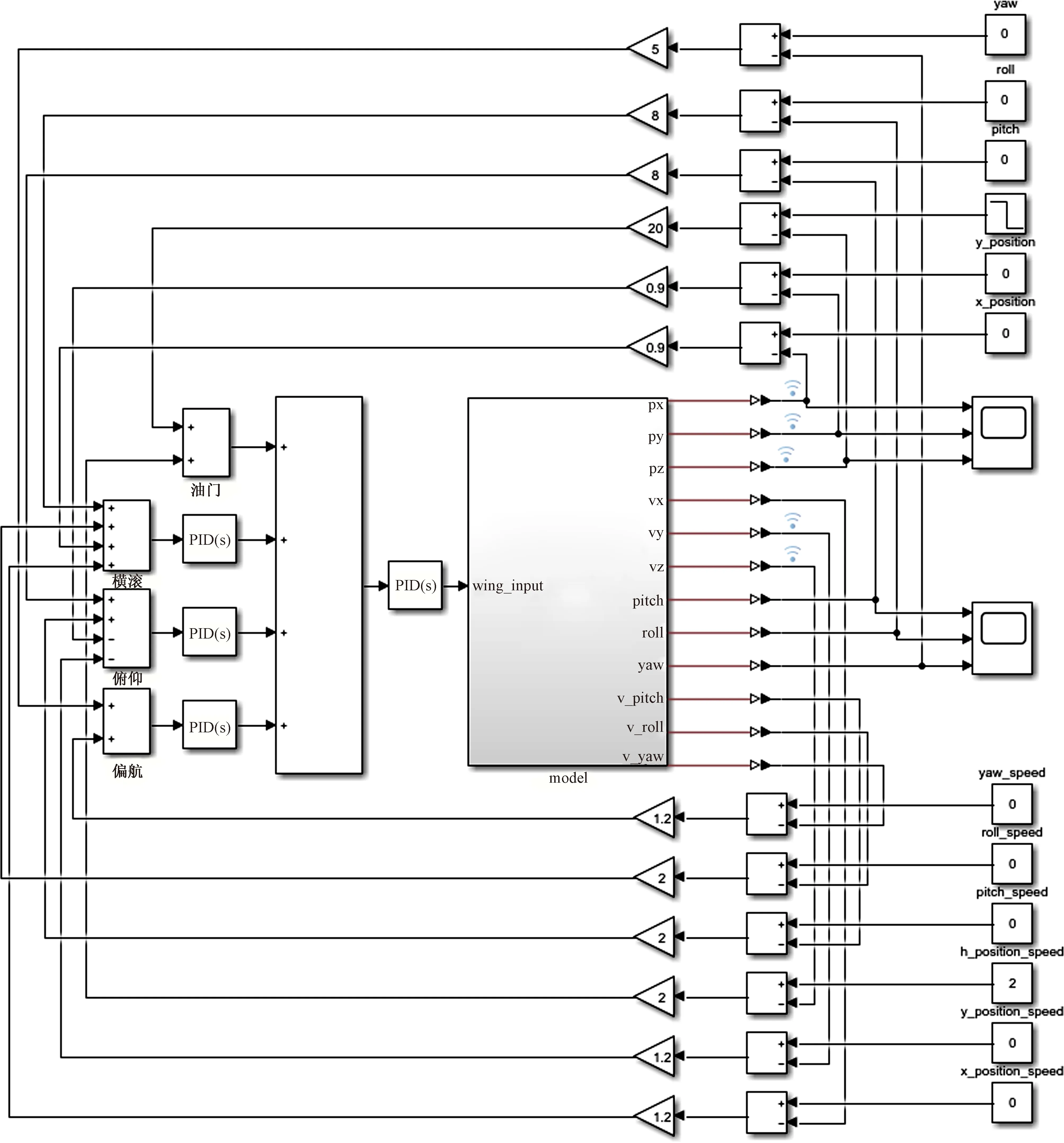
图7 空中系统控制设计
(1)姿态和航向参考形态系统:测量俯仰角、横滚角、航向角、俯仰角速率、横滚角速率、偏航角速率。
(2)惯性传感器:测量系统重心的3个线加速度。
(3)大气数据系统:测量飞行高度、飞行速度、垂直速度、攻角、侧滑角。
(4)导航系统:包括GPS,提供飞行系统经纬度位置,相对参考坐标系的空间位置(x,y,z)。
(5)其他测量信号:如外部障碍物信号等。
设计空中模式的串级PID控制包括内环和外环控制,其中内环PID控制的作用是保持系统飞行状态下的平稳运行,其输入包括系统位姿和气动状态等[13],通过陀螺仪进行测量并反馈到系统;外环PID主要用于控制系统的飞行高度,其输入包括高度、航向、飞行速度等[14],通过气压计、陀螺仪、加速度计等多传感器采集数据传递给系统。
陆地控制系统根据式(6)陆地运动模型与外部姿态间的关系,完成陆地PID控制算法设计。通过系统运动与姿态控制量关系得出输入包括速度、方向、障碍物信号。输出包括电机转速、方向控制量、转换信号,与空中系统类似,同样是一个多输入多输出系统。陆地控制模式下,外环控制为小车行驶位置和方向角度控制,控制输出角速度,再将角速度转换成线速度,由运动学方程进行转换后,作为内环的期望值输入,内环控制为小车速度控制,内环控制输出经过线性映射转换成控制电机的脉冲宽度调制(pulse width modulation,PWM)波。同样通过Simulink建立的控制模型。
通过Simulink分别建立空中系统和地面系统的控制模型后,陆地系统与空中控制系统仍是相互独立运行的,需要相应的输入输出参数进行控制,因此给出系统模式控制表,如表1所示。

表1 系统模式控制表
通过表1中多传感器信号融合后的结果,判断陆空系统当前模式,并根据超声波传感器探测的障碍物信号发出指令进行模式切换。信号为(1,1,1,1)时,表示系统正处于空中模式,并探测到障碍物信号,模式判断模块发出信号,控制系统落回地面;信号为(0,0,0,0)时,表示系统已完成陆地模式下的避障,模式判断模块发出信号,指挥系统再次进行起飞,其他状态均为系统运行过程中的位姿调整姿态。根据系统模式控制表,通过Simulink/stateflow模块建立的模式转换控制模型Transform如图8所示。
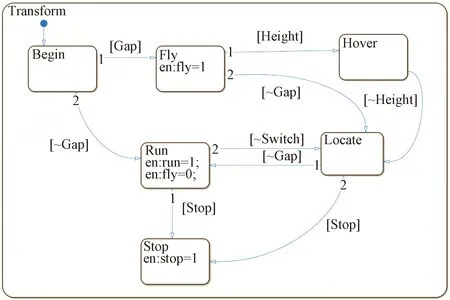
Gap、Height、Switch、Stop分别为障碍物信号、高度控制信号、模式转换信号和停止信号;Begin、Fly、Hover、Run、Locate、Stop分别为启动、空中模式、悬停模式、地面模式、降落模式、停止;fly、run分别为空地运行信号
4 系统仿真
将陆地控制模块、空中控制模块及模式转换模块在Simulink环境中完成整体连接,通过整体系统模型实现测试与仿真。通过Simulation Data Inspector模块,实时监控系统状态,传递到MATLAB环境下的工作空间,直观地得到输入输出数据。
图9为空中飞行模式下,系统完成的控制仿真。本文中设计的飞行高度串级PID控制,目的是实现系统启动后快速企稳,达到设定好的高度并悬停,单级PID控制用来对比算法的控制效果。结果表明设计的串级PID控制能够使系统2 s内到达目标高度并且稳定悬停,相较于单级PID控制缩短了响应时间并且超调量更小,设计的串级PID控制模块能够快速响应控制系统飞行的高度。
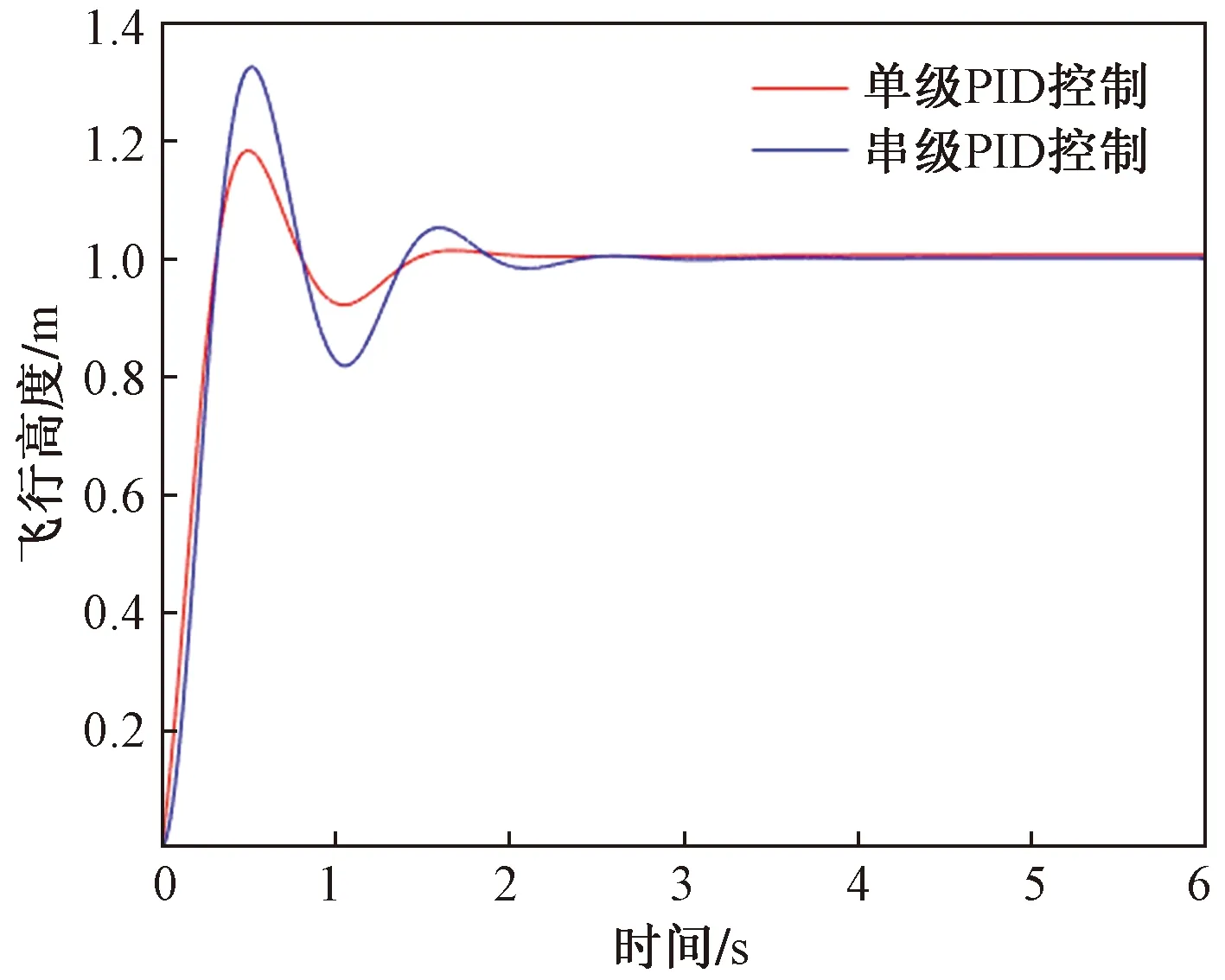
图9 飞行高度仿真
飞行模式下系统的姿态角变化如图10所示,反映了系统角运动的控制效果。仿真结果表明设计的控制系统下偏航角和俯仰角的响应速度较快,2 s时实现偏航和俯仰运动的稳定;偏航角和横滚角的波动幅值较小,最大不超过0.4 rad/s。3 s时姿态角变化为0,实现系统在空中的稳定运行,多传感器信号变化量均为0,为模式转换提供了可行的信号输入。

图10 飞行高度仿真
陆地运行模式下,系统沿着路线向设定目标位置前进,速度和位移曲线如图11所示。系统2 s时启动,速度曲线开始出现变化,3 s后速度稳定在1 m/s,结果表明速度控制在1 s内企稳,能够快速实现陆地模式下运行速度的稳定控制。位移曲线随速度稳定逐渐拟合为直线,线条较为光滑,实现了系统的稳定运行,与理想控制效果基本相符。
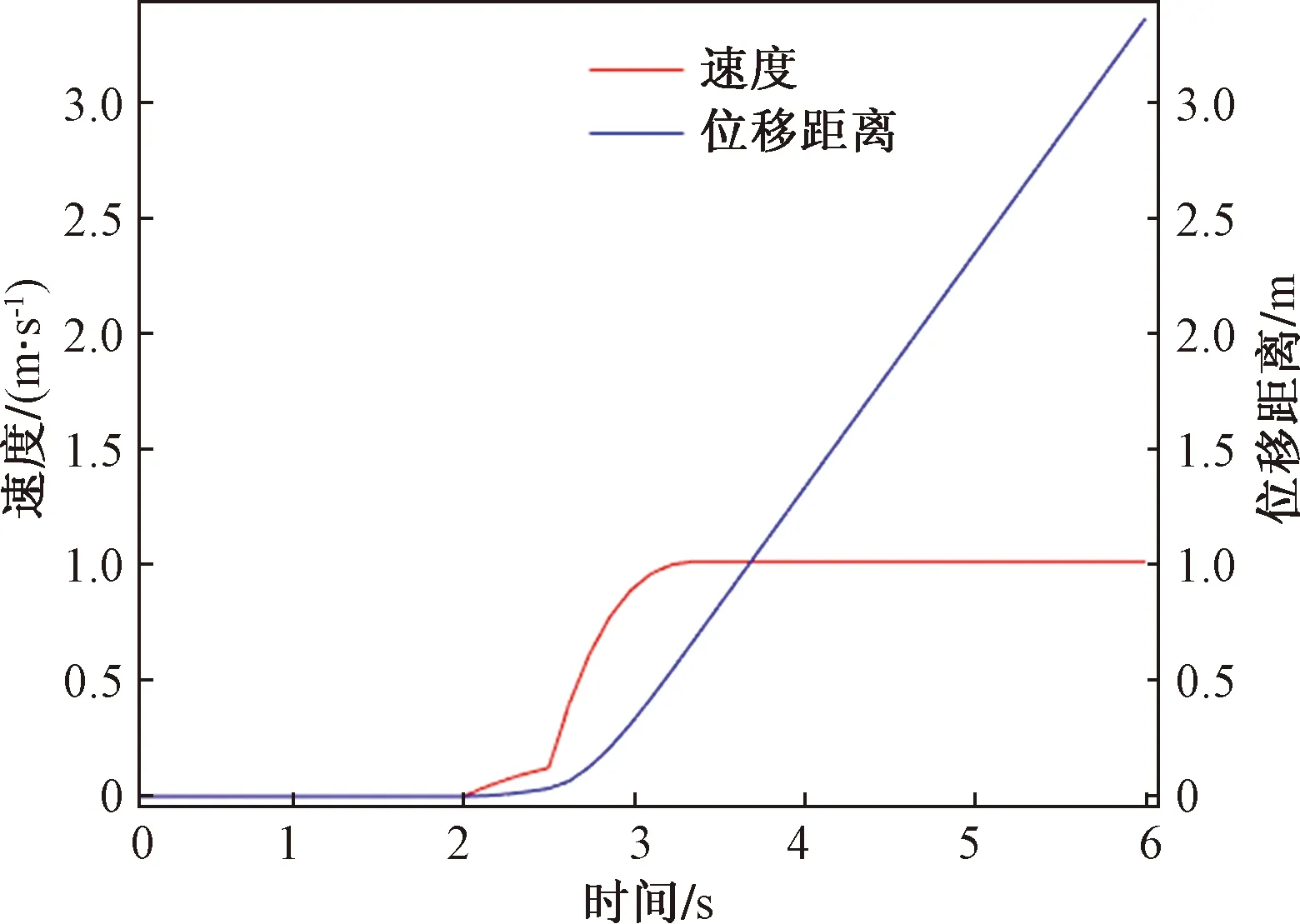
图11 陆地位移、速度仿真
图12为模式转换系统仿真,陆空两栖系统在0时起飞,2 s后飞行高度到达0.5 m并企稳。3 s时,超声波传感器探测到障碍物信号,模式判断模块发出指令,完成高度降落并传递模式转换的信号转换到陆地小车模式。5 s时,系统转换到陆地小车模式开始运行。7 s时,完成障碍物的穿越,超声波传感器障碍物信号消失,模式转换模块发出信号,结束陆地模式,重新进入飞行模式,并在9 s达到1 m高度并企稳。系统完成阶段性的避障,继续执行任务。
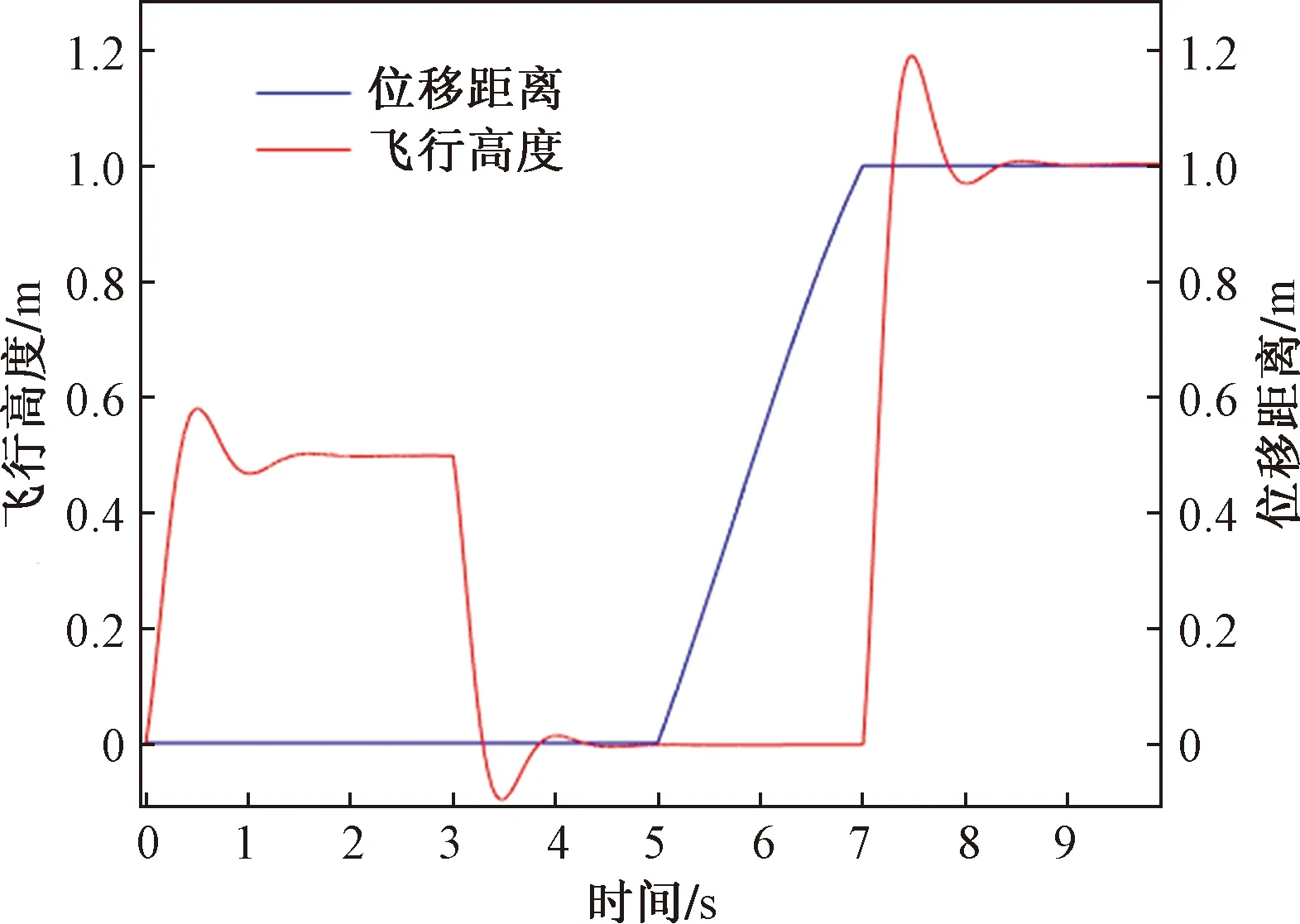
图12 模式转换系统仿真
5 结论
设计的陆空两栖系统能够从机械结构上实现陆空转换,进入相应的运动模式。控制算法上,设计的串级PID算法相较于传统的单级PID控制,能够更快速实现目标高度的飞行及稳定控制,同时地面算法能够快速实现速度的稳定控制,完成系统到目标位置的轨迹运行。陆空模式转换仿真结果表明,设计的模式转换控制模块能够稳定实现陆空两种PID算法的控制,使系统完成陆空模式转换,实现控制的一体化。
猜你喜欢
包装工程(2023年16期)2023-08-25 11:39:16
大科技·百科新说(2022年4期)2022-05-30 10:48:04
小哥白尼(军事科学)(2019年7期)2019-11-16 09:03:38
电子制作(2019年15期)2019-08-27 01:11:48
科技视界(2017年8期)2017-07-31 12:55:51
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
腹腔镜外科杂志(2016年11期)2016-06-01 12:10:09
小哥白尼·趣味科学画报(2016年1期)2016-05-30 18:19:16
学苑创造·B版(2015年10期)2015-11-13 13:14:03
小星星·阅读100分(低年级)(2014年1期)2014-02-19 17:46:37