
全自动接触器包装盒产线自动上料单元*
2022-02-24 03:37倪明堂冯应龙宋国庆陈丽斌卢庆棠毕燕鑫郑春回
机电工程技术 2022年1期
倪明堂,冯应龙,宋国庆,陈丽斌,卢庆棠,林 袋,毕燕鑫,郑春回
(1.广东省智能机器人研究院,广东东莞 523808;2.东莞理工学院机械工程学院,广东东莞 523808)
0 引言
在当今科学技术革命的快速发展现状下,包装行业取得了巨大的进步,包装流水线及自动化包装生产线作业,代替了包装过程中一道道枯燥且反复的步骤,极大提高了生产效率和节约生产成本。相比于以前人工包装的劳作方式,全机械全自动化的包装盒生产线推动力了科学技术革命,解放了人类生产力,极大促进现代化的发展,通过近百年的不断发展,机械行业迎来了朝气蓬勃的发展[1]。
以企业提出的全自动接触器包装盒生产线为设计目标,本文主要研究其中的一个关键单元——全自动接触器包装盒生产线自动上料单元。该上料单元是包装盒生产线的重要组成部分,是不可或缺的一环,也是整条生产线的初始起点。针对客户需求,设计一种具有自动存料、抓取、搬运的上料单元,把接触器包装盒紧密有序运输给自动开盒单元,解决了人工上料效率低等问题。总的来说,接触器包装盒生产过程实现全自动化后,一是可以减少劳动力,降低社会必要劳动时间,节约产品生产成本,有显著的经济效益;二是机器24 h 无故障的工作极大缩短了生产上料时间,提高了生产效率;三是提升企业生产制造水平,增加企业经济效益,提高企业声誉[2]。而且本文的研究有助于促进包装行业的发展,推动全机械化社会的进程,改善人民的生活质量,实现更高水平更高质量的发展。
1 自动上料单元总体方案设计
1.1 接触器包装流程
全自动接触器包装盒产线是企业根据客户要求设计的一个非标定制项目,主要是为客户提供自动化生产流水线解决方案。该项目的主要内容是将展开的包装盒(如图1中的1号),经过一系列的工序,折叠成方形纸盒(如图1中的5号),接着把接触器放在折好的纸盒中,折好盒盖,并贴上标签,包装成可直接销售的产品。具体的包装流程如图1所示。

图1 接触器包装过程
为了能完成上述的一系列包装工序,该样机模型主要是由自动上料单元、自动开盒单元、自动输送及贴标单元和自动运输、上料及扫码单元这4 个部分构成。自动上料单元负责将展开的纸盒夹持、运输给自动开盒单元;自动开盒单元工作,把扁平的纸盒折叠成方形纸盒(底部成型);通过自动运输及贴标单元把折好的纸盒运送给接触器上料单元,并给纸盒贴识别码;叠好的纸盒运输到自动运输、上料及扫码单元时,机器自动识别工件,将接触器准确、快速地放在包装盒中,并折好盒盖,包装成产品,通过运输线传送、识别物料编码、即可出库售卖,整机工作流程如图2 所示。整个生产流水线工序安排合理、紧凑、高效,既节约经济成本,又提高生产效率,缩短生产时间。
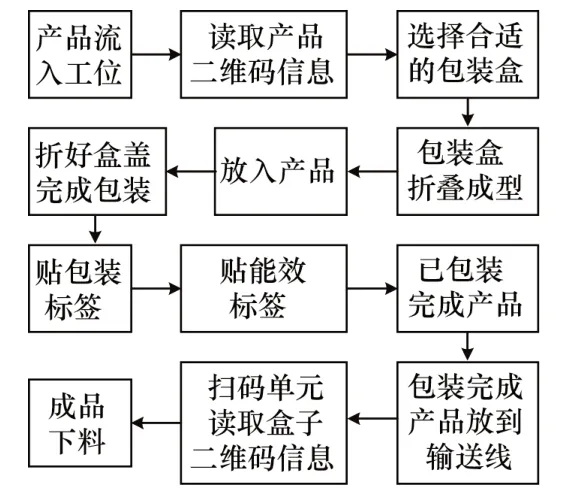
图2 整机工作流程
1.2 自动上料单元工作流程
待上料的接触器包装盒实物如图3 所示,根据实际测量产品相关尺寸可知,包装盒的宽度为(132±1)mm,长度为188.5 mm,厚度1 mm,质量15 g。考虑到包装纸盒的厚度远远小于长宽尺寸,产品质量比较轻,初步确定模型方案为料仓式自动上料机构。

图3 接触器包装盒实物
料仓机构有4 个仓位,每个仓位一次性夹取2 个包装盒,如图4所示。该料仓机构最大装载容量为8 000个包装盒,每个仓位有2 000个包装盒。
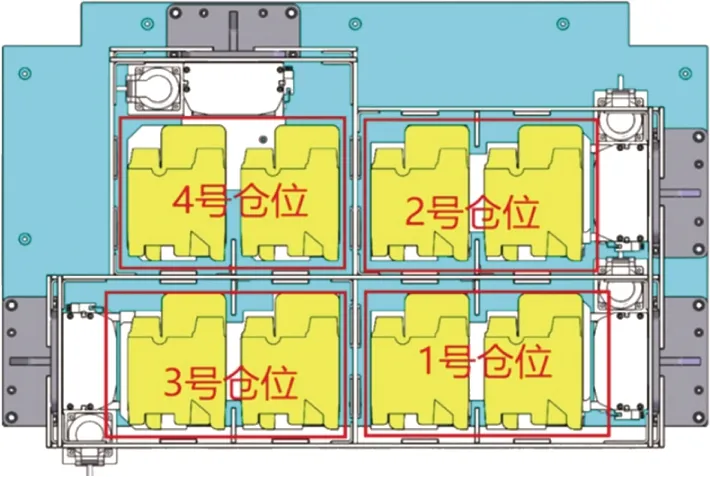
图4 仓位分布
料仓式自动上料机构的工序安排合理、严密紧凑,目的是减少上料时间,提高生产效率。自动上料机构控制系统使用的是可编程逻辑控制器PLC,根据控制系统的逻辑性分析,该上料机构的工作流程安排如图5所示。
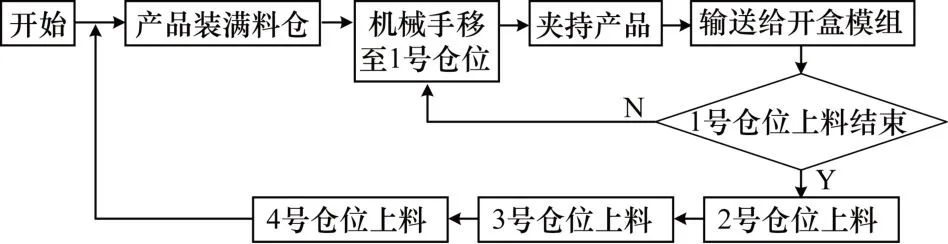
图5 上料单元工作流程
料仓式自动上料机构设备具体的工作流程设计如下。
(1)人工定时往料仓机构里装料,装料是从上往下一垛一垛叠堆的,竖直的单轴机器人缓慢往下运动,直到极限位置,装料完成。
(2)X、Y、Z三轴联动机器人,在PLC系统控制下,紧密配合,从开盒模组起始位置运动到1 号仓位,气缸开始工作,真空吸盘吸附纸盒,夹持物料,回到开盒模组处,同时,1 号仓位的单轴机器人缓慢上移,填补刚刚的空位,循环往复,直到1号仓位物料全部夹取完成。
(3)1 号仓位搬运结束后,机器人按照同样的步骤夹取2号仓位、3号仓位、4号仓位的包装盒。
(4)料仓机构的物料全部夹取完毕后,工作又回到第一步,反复循环地工作。
1.3 自动上料单元整体结构
1.3.1 模型结构
本文研究的全自动接触器包装产线自动上料单元是整条生产线的一个单元,其任务是将夹持接触器包装盒运输给自动开盒单元。接触器包装盒长宽比较大、厚度薄、质量轻、位置精度要求不高,通过市场调研,结合产品特点,综合权衡考虑,采用料仓结构堆放产品。从工作原理和工作空间等方面考虑,通过比较直角坐标式机械手、圆柱坐标式机械手、球坐标机械手和关节型机械手的结构、加工制造过程,经济成本和生产周期等方面,选择直角坐标系机械手在路径规划[3]、工作空间和加工制造难易程度上比其他机械手更有优势。综合上述,该自动上料单元采用料仓式直角坐标自动上料结构[4],结构的三维模型如图6所示。
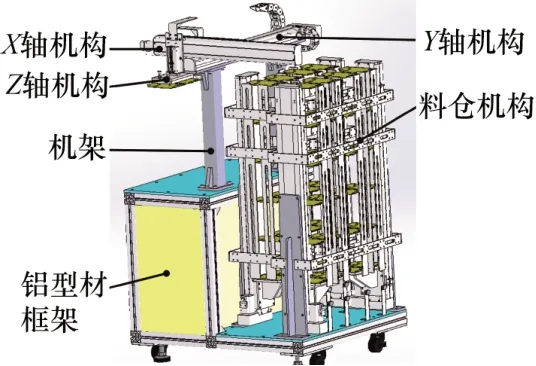
图6 自动上料单元三维模型
1.3.2 直角坐标机器人工作原理
直角坐标机器人是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机[5]。根据笛卡尔坐标系的理论,可知空间上的任意一点都是由X、Y、Z轴3 个方向的尺寸共同确定的。因此为了研究问题方便,可以把空间任意两点的曲线运动简化为分别在3 个自由度方向的直线运动,类似于数控技术中直线插补的方法[6]。
能够实现直线运动的传动方式有很多种,在目前的市场中,主要使用滚珠丝杆传动、齿轮齿条传动、同步带传动、液压传动和气压传动这几种传动方式[7]。通过对比几种常见传动方式性能,结合模型的结构情况,直线运动方式采用线性导轨辅助的滚珠丝杆传动。
1.3.3 直角坐标机器人外形确定
目前在市场中,直角坐标机器人主要结构形式有两种,一种是龙门式直角坐标机器人,另一种是悬臂式直角坐标机器人,两种结构形式的特点如表1 所示[8-9]。根据客户需求,此次设计的结构,运输的产品质量较轻,长宽距离相对较大,对模型的空间资源和灵活性要求较高,综合考虑,该自动上料单元选择悬臂式直角坐标机器人。
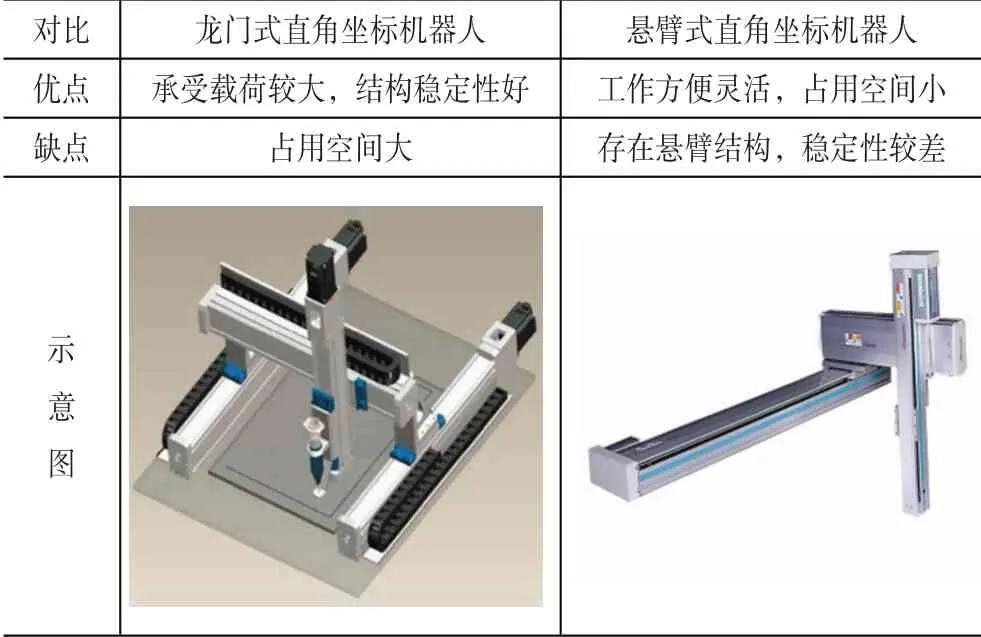
表1 两种机器人性能对比表
本章主要内容是根据包装盒结构特点和客户需求来确定接触器包装盒自动上料单元的工艺流程,并对自动上料机器人做出正确的路径规划;根据工作要求和传动结构特点,确定三轴机器人的结构模型方案,而且直角坐标式机器人使用悬臂式结构;综合各方面考虑,自动上料机构整体结构方案采用料仓式悬臂直角坐标自动上料机器人。
2 自动上料单元结构设计
2.1 总体结构布局
根据工作流程与传动结构特点对自动上料单元的整体结构布局进行设计,全自动接触器包装盒产线自动上料单元整体设计为料仓式直角坐标自动上料单元。自动上料单元的三维结构分布图如图7 所示,主要是由铝型材框架、机架、X轴机构、Y轴机构、Z轴机构和料仓机构组成。自动上料单元的整体布局以合理、紧凑、实用为主,根据包装盒产品存放位置与自动开盒单元在整条生产线的布局,合理地布置各机构在模型的空间位置,提高机器的稳定性、工作效率和动作连贯性。
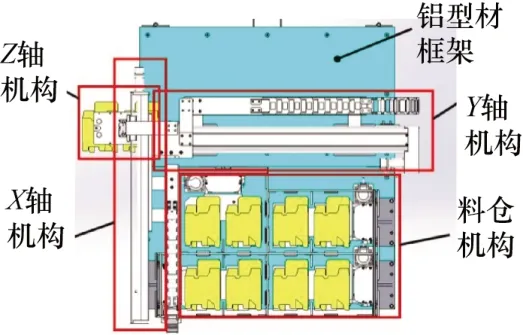
图7 模型结构布局
2.2 X轴机器人
2.2.1 结构方案
由前面的样机结构方案分析,可知自动上料单元采用悬臂式直角坐标机器人,而X轴机构对应的就是悬臂结构的机器人,如图6 所示。通过对直角坐标机器人工作原理分析,根据工作要求和直线传动特点,X轴结构采用丝杆型单轴机器人传动[10-11]。选择丝杆型单轴机器人的优势如下:
(1)单体运动速度快、运动平稳、摩擦阻力小、传动效率高;
(2)重复定位精度高;
(3)本体质量轻、占用空间小、使用寿命长;
(4)市场上的单轴机器人形成标准化,可直接选型使用,无需单独设计,如怡合达、米思米等公司,缩短设计周期,节约生产成本。
X轴机构由单轴机器人、拖链、X轴固定板、L 型固定板和拖链槽组成,如图8 所示。单轴机器人的滑块用于安装Z轴机构,带动Z轴机构做直线运动;X轴固定板用于把单轴机器人固定在Y轴机器人的滑块上,使X轴机构能随着Y轴机器人中的滑块运动而运动;L型固定板用于把拖链槽固定在X轴固定板上,起着支撑紧固作用;拖链槽用于放置拖链,并防止拖链工作时因振动而发生偏移;拖链用于放置一些电线、气管等连接件。
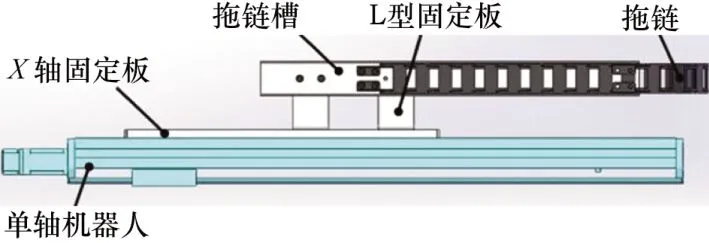
图8 X轴机构三维图
X轴机构的核心结构为单轴机器人的结构设计,目前市场上的单轴机器人已经标准化,为了缩短设计周期和节约成本,该机构决定选用怡合达的丝杆型单轴机器人。丝杆型单轴机器人核心零部件为滚珠丝杠、电机等,根据机器人承受的载荷、使用环境等,详细地对滚珠丝杠、电机等核心零部件进行选型计算。
2.2.2 单轴机器人选型
根据单轴机器人的使用条件(表2)可知,该单轴机器人工作载荷较轻,安装空间要求不严格,使用环境要求不高,故初步选择怡合达产品型号为YBSC8B-10-600-BC-P-20-N-D-3 的单轴机器人。为了提高设备性能及合理使用标准件,下面对该单轴机器人进行载荷计算、滚珠丝杠的校验和电机选型。
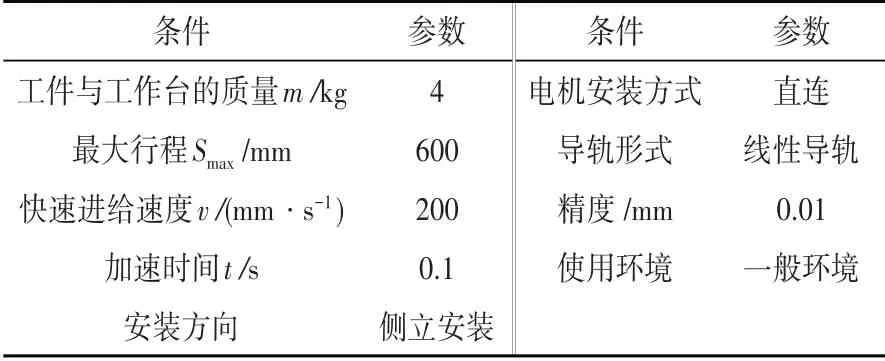
表2 X轴机构单轴机器人使用条件
X轴机构所受负载受力示意图如图9所示,由重力公式计算得:
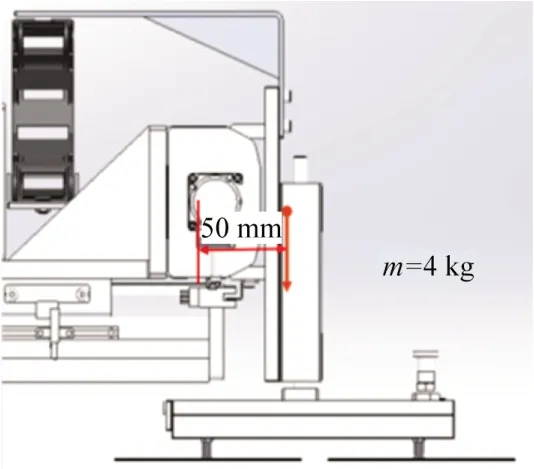
图9 X轴机构受力示意图

工件产生的转矩为:

在怡合达官网上查询YBSC8B 系列单轴机器人详细参数表,可知X轴机构水平和竖直最大负载分别为25 kg 和12 kg,均比实际工件载荷4 kg 大;而且单轴机器人Mxd 容许力矩为7 N·m,比工件产生的转矩T=1.96 N·m 大,故型号为YBSC8B-10-600-BC-P-20-N-D-3 的单轴机器人满足负载要求,X轴机构结构设计合理。
2.2.3 滚珠丝杠
(1)丝杠安装方式
根据滚珠丝杠的工作要求、使用环境和载荷大小等情况,对比滚珠丝杠4 种安装方式的特点,初步选用一端固定一端铰支安装方式。
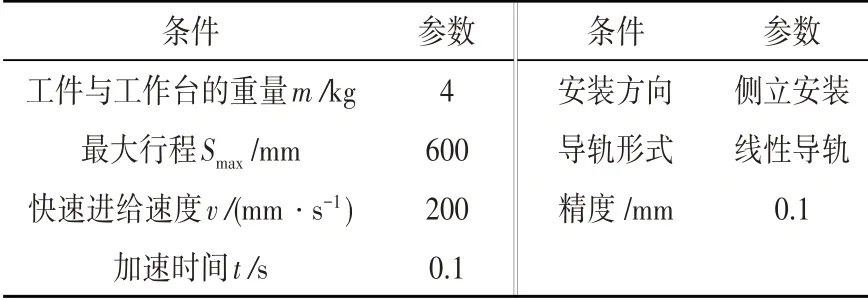
表3 丝杆使用条件
(2)丝杠许用轴向载荷计算

式中:P为丝杠许用轴向负载;α为安全系数,一般取0.5;E为杨氏模量,取2.08×105N/mm2;d为丝杠轴低径;L为安装距离;I为丝杠轴截面最小惯性矩;n为安装系数,取2。
将式(4)代入式(3),得:

(3)丝杠许用转速
丝杠许用转速计算公式为:

式中:N为丝杠许用转速;β为安全系数;g为重力加速度;γ为丝杠材料比重,γ=ρ·g;A为丝杠最小截面积;λ为丝杠安装方法的系数,取3.927。
公式推导如下:
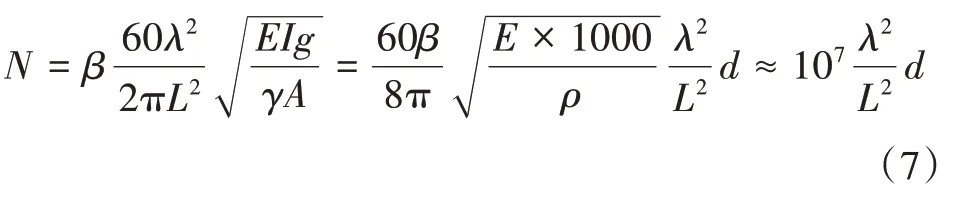
式(7)推导过程仅适用于丝杆材料密度为7 800 kg/m3,即丝杆选用的材料是钢。
(4)确定丝杆导程
丝杆导程计算公式为:

式中:P为丝杆导程;vmax为负载移动最大速度;Nmax为丝杆最大转速。
200 W 伺服电机许用转速Nmax=3 000 r/min,所选单轴机器人最大进给速度Vmax=500 mm/s,即为30 000 mm/min。将数值代入式(8)中,求得丝杠的导程为:

实际取Ph=10 mm,可满足速度要求。
(5)丝杆长度确定
根据X轴向运动行程为600 mm,可计算出两个固定支撑座的最大距离:

(6)轴向负载计算
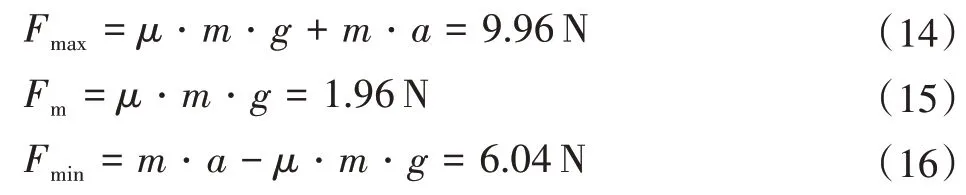
丝杆水平安装时,加速运动状态滚珠丝杠副承受最大轴向载荷。减速运动状态时滚珠丝杆副承受最小轴向载荷如下。
加速时:

均速时:

减速时:

式中:Fmax为滚珠丝杠副承受的最大轴向载荷;Fm为滚珠丝杠副匀速运动时轴向载荷;Fmin为滚珠丝杠副承受的最小轴向载荷;为摩擦因数,线性导轨取0.05;m为滑台质量及最大工件质量;g为重力加速度;a为加速度。
由前面可知,正常工作的速度为200 m/s,即为0.2 m/s,最大负载m≈4 kg,加速时间t=0.1 s,加速过程的加速度为a=v/t= 2 m/s,选用线性导轨,μ=0.05,将数值代入式中,求得丝杆轴向力为:
(7)丝杆轴径确定
在式(5)中,使F≤P,为保险起见,P取大于F的整数值,取P=10 N,逆运算求丝杆低径d1为:

根据长径比计算轴径d2,长径比通常必须小于60,即:

代入数值得:

公式(9)中,丝杆材料为钢,使Nmax≥N,实际应用中,丝杆杠转速为1 500 r/min左右,逆运算求d3:

经核验计算,丝杆轴径需要同时满足式(17)、(19)、(20),即:

故选用滚珠丝杆外径d0=16 mm,底径d=13.6 mm,可满足轴径计算要求。
(8)基本载荷及寿命
丝杠平均载荷计算公式如下;

丝杆工作时的负载条件如表4 所示,代入式(22)中,计算得平均载荷为:


表4 丝杆工作状况
平均转速计算公式如下:

代入具体数值,求得平均转速为:

基本额定动载荷计算:

式中:Lh为预期工作时间,取30 000 h;fw为载荷系数,取1.2。
将已知数值带入式中,求得丝杠额定动载荷为:

基本额定寿命计算:

经计算校核,滚珠丝杆导程Ph=10 mm,外径d0=16 mm,基本额定动载荷Ca=63.28 N,基本额定寿命Lh=29 997.54 h(在误差范围内),均满足YBSC8B 单轴机器人参数和其他选型参数,故该单轴机器人的滚珠丝杆满足工作要求。由于在滚珠丝杆选型计算过程中涉及直线导轨和轴承的内容,因此不对这两部分单独计算。
2.2.4 电机选型
选择伺服电机驱动,伺服电机选取松下伺服电机MSMF022L1U2M,驱动器型号为MADLN15SE,功率为200 W,额定转矩为0.64 N·m,最大瞬时扭矩为2.23 N·m,额定工作转速3 000 r/min。
已知:负载重量m=4 kg,丝杆螺距Ph=10 mm,丝杆直径d0=16 mm,机械效率η=0.9,负载移动速度v=200 mm/s,全程移动时间t=3 s,加减速时t1=t2=0.1 s。
(1)计算折算在电机轴上的负载惯量
重物折算到电机轴上的转动惯量:

滚珠丝杆的转动惯量:

由于未明确给出滚珠丝杆的具体参数,假设丝杆重量mb=5 kg。
电机上总负载惯量:

(2)计算电机转速
电机所需转速:

(3)计算电机驱动负载所需要的扭矩
克服摩擦力所需转矩:

式中:F为滚珠丝杆轴向载荷,F=9.96 N。
重物加速时所需转矩:

丝杆加速时所需转矩:

加速时所需总转矩:

预紧力产生的摩擦扭矩:
式中:Fp为滚珠丝杆副的预紧力,Fp=Fmax/3。
在滚珠丝杆选型过程中,已包括轴承受力计算,故不再对轴承进行另外选型计算,所以设支撑轴承产生的摩擦扭矩为Tb1=0.1 N·m。
电机总扭矩:

所选伺服电机额定转矩T=0.64 N·m,最大瞬时扭矩Tmax=2.23 N·m,额定转速N0=3 000 r/min,根据伺服电机选型原则进行比较:伺服电机额定扭矩T>Tf,且T>T总;伺服电机最大扭矩Tmax>Tf+TA;伺服电机额定转速N0>N。根据计算比较结果,伺服电机MSMF022L1U2M 满足各方面参数要求,故选型合理。综上,选择型号为怡合达YBSC8B-10-600-BC-P-20-N-D-3 的单轴机器人,型号为松下MSMF022L1U2M 的伺服电机均满足X轴机构的工作要求。
2.3 Y轴机器人
Y轴机构与X轴机构设计原理类似,都是运用单轴机器人实现直线传动,重复部分便不做多余陈述,下面主要对Y轴结构进行详细描述。
Y轴机构由单轴机器人、拖链、Z型固定板、滑块和电机组成,如图10 所示。单轴机器人的滑块用于安装X轴机构,带动X轴机构做直线运动;Z 型固定板用于连接拖链末端,起着固定零件的作用,加强拖链安装强度;拖链用于放置一些电线、气管等标准件;Y轴机构通过螺钉连接,固定在机架上,为三轴联动机器人的固定部位。
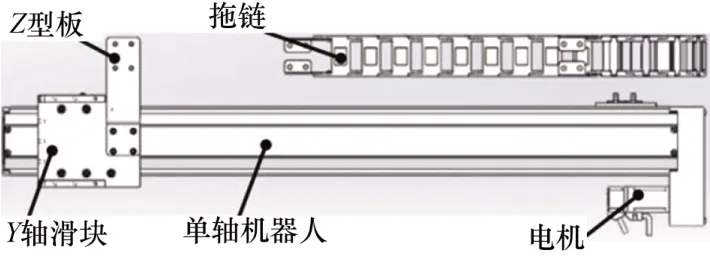
图10 Y轴机构三维模型
2.4 Z轴机构
根据结构方案设计,Z轴机构为抓取模块,考虑到包装盒结构特点,平坦,较宽又薄,不便采用夹持式机械手,故采用气缸+真空吸盘结构,Z轴机构的三维模型如图11所示。该机构主要是利用薄型气缸的双作用带动真空吸盘组件吸附物料进行上下料,实现Z轴的直线运动。气缸为执行元件,把空气压力能转换为机械能,为执行末端通过动力[12];真空吸盘组件是由自己设计的结构模块,目的是提高真空吸盘吸附的平稳性;气缸固定板用于把Z轴机构固定在X轴机器人的滑块上,使Z轴机构能随着X轴机器人中的滑块运动而运动;L 型固定板用于连接拖链末端,起着固定电线,加强拖链安装强度的作用。
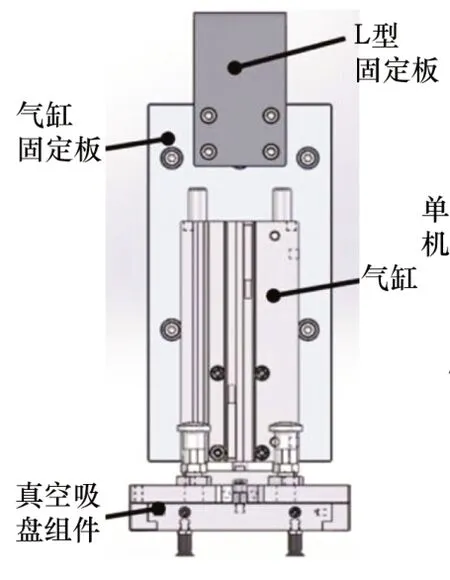
图11 Z轴机构三维图
由于被抓取的物料质量比较轻,Z轴机构是固定在悬臂的X轴机构上的,为减小机器的受力变形损害单轴机器人和影响工作精度,因此采用薄型双作用气缸比较合适。已知真空吸盘组件和物料总质量M=2 kg,气缸工作行程为100 mm。
气缸所受轴向负载力F为(竖直安装):

理论输出力为:

式中:η为负载率,取0.5。
普通双作用气缸的理论推力为:

式中:D为缸径;p为气缸的工作压力,取0.5 MPa。
由式(41)得双作用气缸缸径为:

为了安全起见,气缸缸径选型比计算值大一点,取标准尺寸,D=16 mm。
故选用型号为怡合达薄型气缸WGU02-16-100-2,缸径16 mm,行程100 mm。
2.5 料仓机构
根据结构方案设计要求,样机需要设计料仓机构存放物料,料仓机构三维模型如图12所示。料仓机构主要由单轴机器人、脚座、框架、底板、传感器等组成,单轴机器人用于做竖直方向的直线运动,往下运动储存叠放物料,往上运动是为Z轴机构提供吸附的物料;脚座用于固定单轴机器人和外部框架,需要比较高的强度和硬度,故使用钢材制造;外部框架是为了规范每个仓位空间,防止物料叠乱、掉落等;底板用于将料仓机构固定在铝型材框架上,方便移动;传感器用于检测物料状况、计数等。
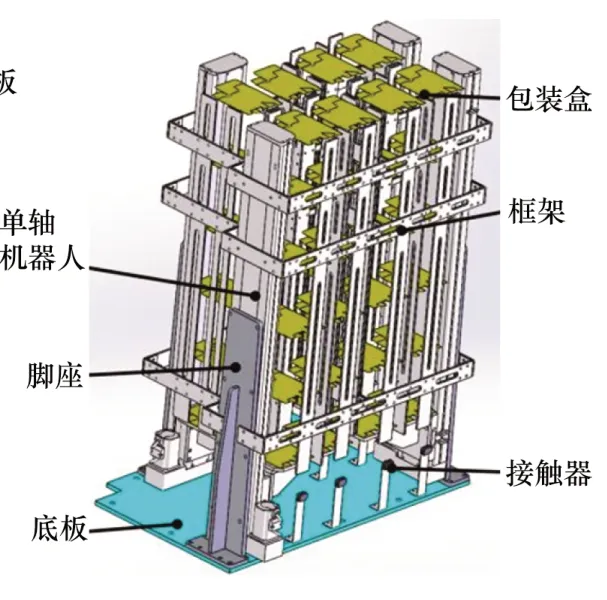
图12 料仓机构三维图
料仓机构运动模块与X轴结构类似,料仓机构的核心结构为单轴机器人的结构设计,其计算过程类似于X轴机构的计算,故不更多陈述。
2.6 机架
机架结构的设计是用于固定三轴机器人,为了提高设备的工作强度和稳定性,采用龙门式结构,三维模型结构如图13所示。支撑柱是用方钢、筋和上下两块钢板利用焊接技术连接的,目的是节约材料,减少加工制造成本,主要作用是将X、Y、Z三轴机构通过机架固定在铝型材框架上;支撑板主要作用是固定Y轴机构,调解两个支撑柱的安装距离,与支撑柱一起用于支撑、固定作用。
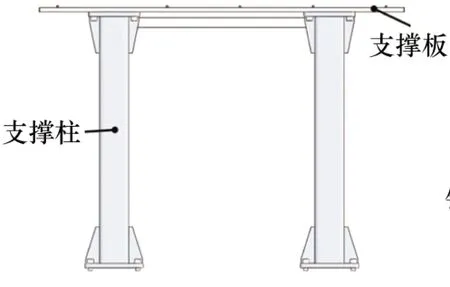
图13 机架三维模型
2.7 铝型材框架
为了加强各机构之间的联系,方便自动上料单元自由移动,提高机器的美观性,设计了铝型材框架,如图14所示。铝型材框架是用60 mm×60 mm 的铝型材通过角码连接搭建的,其结构牢固,搭建方便,制造成本低。底板用于固定机架和料仓机构,起连接固定作用;脚轮是方便机器必要之时用于移动,使用的是怡合达的万向轮;脚杯用于机器的固定支撑作用,通过扭转螺母可调节距离。铝型材框架整体结构合理、紧凑,尺寸安排正确,具有设计美观性。
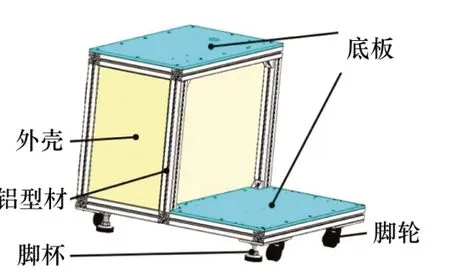
图14 铝型材框架三维模型
3 结束语
本文主要围绕全自动接触器包装盒产线自动上料单元结构设计展开。前期通过对大量文献资料进行收集、调研,了解国内外上料机构的研究现状和发展趋势,以及上料机构在实际生产中的应用和相关机构模型方案。在研究文献资料、客户需求等基础上,通过计算机辅助设计对自动上料单元进行结构方案设计、路径规划、三维建模、有限元分析等。最终设计出一种料仓式悬臂直角坐标式自动上料单元结构,其结构模型主要分为6个功能模块,分别为X轴机构、Y轴机构、Z轴机构、料仓机构、机架和铝型材框架单元模块。对于上料机构的模型结构,通过静力学有限元分析,对模型方案进行优化,验证了结构方案的可行性和准确性。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
有色金属材料与工程(2021年4期)2021-11-27
小天使·一年级语数英综合(2021年8期)2021-08-17
石油化工设备(2020年5期)2020-12-11
装备维修技术(2020年4期)2020-11-23
东坡赤壁诗词(2020年4期)2020-09-02
科学与财富(2020年7期)2020-05-19
数学大王·中高年级(2020年2期)2020-03-13
学生天地(2019年36期)2019-08-25
小天使·三年级语数英综合(2015年5期)2015-06-06
