基于模糊PI的两档纯电动汽车AMT变速器换档控制
2022-02-24 08:46毕善汕姚子欣
林业机械与木工设备 2022年1期
毕善汕, 姚子欣
(江苏联合职业技术学院常州刘国钧分院,江苏 常州 213025)
纯电动汽车噪声小、排放低,是目前汽车工业的重要发展方向。目前,普遍采用的固定传动比传动系统无法同时满足车辆对经济性和动力性的需求,因此纯电动汽车多档化是目前国内外专家研究的重点。
机械式自动变速器传动效率高、成本低、体积小适合纯电动汽车使用,但相较于AT、CVT、DCT,电控机械式自动变速器换档过程中存在动力中断,因此乘坐舒适性,平顺性较差。为此,研究学者在此方面投入了大量研究。
为减小换档冲击,秦大同[1]等以保留离合器和同步器的两档AMT为研究对象,通过设计离合器和电机的反馈控制器,避免了换档过程中的动力中断,但保留离合器和同步器使得AMT结构复杂,增加了控制难度,自动换档效果差。为了提高换档效率,减少整车重量,岳东鹏[2]等分析了无离合AMT在纯电动车上的应用前景。陈永东[3]提出了一种同步器约束控制方法,有效缩短了同步器同步时间。周爽[4]等设计了一种协调控制器,优化了驱动电机和换档电机控制逻辑,提升了换档效果。由于车辆行驶过程中驱动电机和档位齿轮转动惯量较大,取消了离合器后,同步器同步二者时间长且磨损严重。为了解决上述问题,王阳[5]等提出了一种纯电动客车无离合器无同步器换档控制方法。王大方[6]等、罗先兵[7]、贾辉[8]、傅洪[9]等设计了多种精确拨叉控制器,虽避免了打齿情况的发生,但均降低了换档速度。
综上所述,目前研究并未详细分析车辆换档过程动力学特性,针对永磁同步电机非线性、强耦合的特点设计相应电机控制器。因此,本文在设计电动变速箱结构和工作模式的基础上,建立描述换档过程的换档动力学模型,并针对永磁同步电机强耦合、非线性的特点设计了模糊PI电机控制器,保证车辆快速平稳的完成换档操作。
1 电动变速箱结构及工作模式
两档变速箱结构简图如图1所示。

图1 单排行星齿轮两档变速箱结构简图
图中,1为太阳轮,2、3为行星轮,9为行星架,4为齿圈、5为固结齿圈,6为结合套,7、8分别为一档和二档结合齿圈。该型减速器通过单行星排实现一档和二档之间的切换,并利用同步器减少换档冲击。工作模式分为一档减速增扭和二档直接传动。减速增扭模式下,结合套6将固结齿套5和变速器壳体7固结。直接传动模式下,结合套6将行星架8和行星齿圈4固结。
2 换档动力学分析
分析上述两档变速箱结构,可得整车传动系统动力学模型示意图,如图2所示。

图2 整车传动系统动力学模型
2.1 摘档动力学分析
对摘档过程中啮合齿的受力情况进行分析,其受到的阻力来自结合齿圈和接合套的摩擦,表示为:
(1)
式中:μ为齿面摩擦系数;Fv接触面正压力;Tc为接合套处的力矩;R为接合套分度圆半径。
接合套处传递的力矩和整车阻力矩的计算方法如式(2):
(2)
式中:Tm为驱动电机输出力矩;Jm为变速箱输入轴等效转动惯量;ωm为输入轴角速度;Tv为整车等效阻力矩;Jv为变速箱输出端等效转动惯量;ωout为输出轴角速度;cin、cout分别为输入、输出轴的旋转阻尼系数。io、ig分别为主减速器速比和当前档位速比。
因此,当AMT处于非空档时,有以下关系:
ωm=igωout
(3)
由于cin、cout较小,为简化模型将上述两值忽略不计,因此由式(1)~(3)可得:
(4)
由式(4)可知,当驱动电机输出力矩为0时,接合阻力最小,此时换档最轻便。
2.2 挂档动力学分析
对挂档阶段啮合齿受力进行分析,当接合套尺和目标档位齿轮齿圈接触时,拨叉阻力Fq可表示为:
Fq=FNsinβ+Fscosβ
(5)
(6)
(7)
式中:μ2为齿端接触面摩擦因素;β为齿端倒角角度。
由式(5)~(7)可知,拨叉阻力Fq越小,变速箱挂档越顺利,即要求Tc尽可能小。由式(2)可知,驱动电机输出转矩Tm,接合套和接合齿圈之间转速差越小,Tc越小。因此,挂档过程中,驱动电机应停止输出转矩,同时控制接合套与接合齿圈转速差最小。
2.3 换档过程动力学分析
双参数换档策略相对于单参数换档策略使得纯电动车辆获得更好的动力性和经济性,相对于三参数换档策略而言更易于设计。因此,本文选择车速和当前油门开度为参数,设计双参数换档策略。
分析车辆行驶过程中的受力情况,可得纯电动汽车行驶方程为:
Ft=∑F
(8)
式中:Ft为纯电动车辆驱动力;F为行驶过程中受到的阻力,分别有滚动阻力、空气阻力、坡道阻力、加速阻力。
纯电动汽车两档变速驱动可分为三个操作阶段分别为摘档、电机同步和进档。摘档过程电动变速机构扭矩与转速关系如下式所示:
Tout=Tf=Tm-Tlost
(9)
ωl=ioigωm
(10)
式中:Tout、Tf、Tm、Tlost分别为车轮驱动转矩、地面阻力力矩、电机输出力矩和转矩损失。ωm、ωl分别为电机输出转速和车轮转速。ig和io为变速器档位传动比和车辆主减速比。
电机同步阶段,电机需要迅速调整转速到达啮合要求,电机需要调整的转速如下式所示:
Δωinput=(in-ig)ioωm
(11)
式中:in为换档后传动比。为了避免换档过程中高转速差导致的齿轮碰撞,电机调速过程中,齿轮啮合转速差需调整至10~50 r/min。
纯电动汽车的换档冲击度j可表示为:
(12)
当齿轮转速差到达合理范围内,车辆将迅速完成进档操作,并根据实际工况对电机转速进行调整,保证换档前后车辆具有相同动力性。由式(12)可知,纯电动汽车换档冲击度与电机输出转矩的一阶导数成正比,电机输出转矩变化越剧烈,产生的冲击度越大。
本文使用的两档无离合变速器1档速比为14.699,为低速档。2档速比为4.716为高速档。为了能够在短时间内完成换档,从1档切换至2档PMSM的转速需要快速提高,从2档切换至1档PMSM的转速需要快速降低。综上所述,为了保证换档品质控制器需要对电机转速进行快速、准确的控制。
3 永磁同步电机控制器设计
3.1 永磁同步电机数学模型
基于以下假设建立永磁同步电机数学模型:(1)定子相绕组完全对称,定子电流与转子磁场分布对称。(2)气隙磁场为方波。(3)不计齿槽、换相过程、电枢反应的影响。(4)电枢绕组在定子表面均匀连续分布。(5)不计涡流和磁滞损耗,磁路不饱和。
矢量控制是应用于PMSM的最优良控制方法,由于电机电磁转矩取决于定子的电流空间矢量is,而通过控制iq、id可确定is的相位和大小,这也就确定了电机的电磁转矩。本文采用id=0的矢量控制方法,因此PMSM的数学模型可简化为下式:
(13)
式中:Lq为q轴电感;ωm为转子角速度;Rs为定子内阻;iq为q轴电流分量;uq、ud分别为q轴、d轴方向的电压分量;Pm为电机磁极对数;Te为电磁转矩;φr为磁通。
3.2 模糊PI控制系统设计
传统的PID控制虽不依赖于精确的数学模型,但当外界条件发生变化时,控制器参数不能自适应调整,导致控制效果恶化[10-13]。基于模糊理论,将实践经验转化为数学表达,提出一种PI参数自适应调整的模糊PI永磁同步电机控制系统,系统结构如图所示。
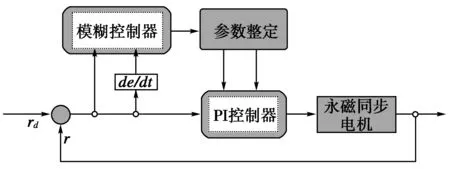
图3 模糊PID控制系统结构简图
上图本文设计模糊PI控制系统结构,系统输入为永磁同步电机期望转速和电机实际转速r,取转速差信号e以及转速差变化率ec作为模糊控制器输入,控制器输出信号为PID系数调整量Δkp、Δki和Δkd。
模糊集论域级数高,模糊控制规则相对细致,但编程难度较高且占用内存多。为了克服这一问题,本文将转速差输入(e)、转速差变化率输入(ec)、PID调节量Δkp、Δki均分为7个模糊集,分别为PB,PM,PS,ZE,NS,NM和NB,其中,PB表示正大,PM表示正中,PS表示正小,ZE表示零,NS表示负小,NM表示负中,NB表示负大。为避免出现失控现象,设定转速差和转速差变化率的论域为[-4,4],设定PI参数调整量论域范围分别为[-0.2,0.2]、[-0.3,0.3]。
控制系统性能受隶属度函数曲线影响明显,若函数形状较尖,则系统分辨率高,控制灵敏,但系统鲁棒性较差。若函数形状较平缓,则系统具有较强的鲁棒性,但系统灵敏度低。隶属度函数包含三角形、高斯型、梯形等。本文采用三角形隶属函数与梯形隶属函数设计相结合的方式作为输入的隶属度函数,即输入变量较大时采用梯形隶属度函数,提升系统鲁棒性,在输入变量较小时采用三角形隶属度函数,提升系统灵敏性。图4和图5为输入变量e和输入变量ec隶属度函数,图6和图7为输出变量Δkp、Δki和Δkd的隶属度函数。

图4 输入变量e隶属度函数

图5 输入变量ec隶属度函数
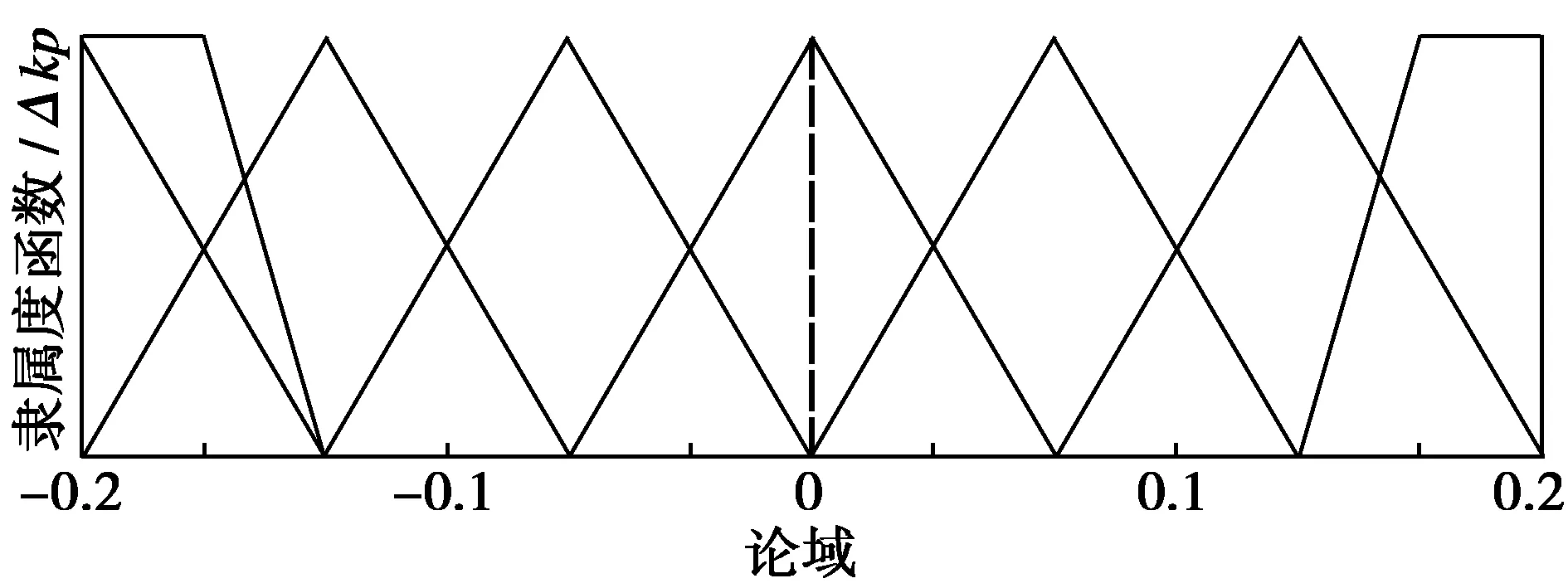
图6 输出变量Δkp隶属度函数
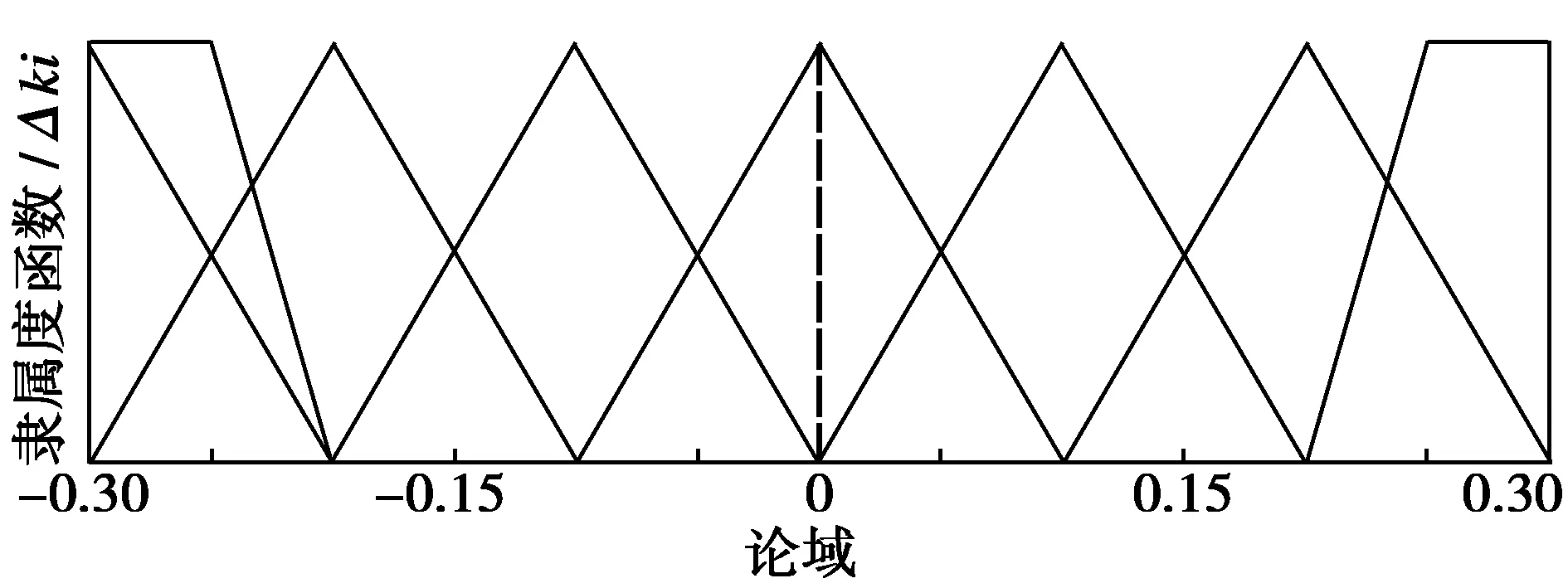
图7 输出变量Δki隶属度函数
表1、表2分别为输出变量Δkp、Δki的模糊控制规则表。
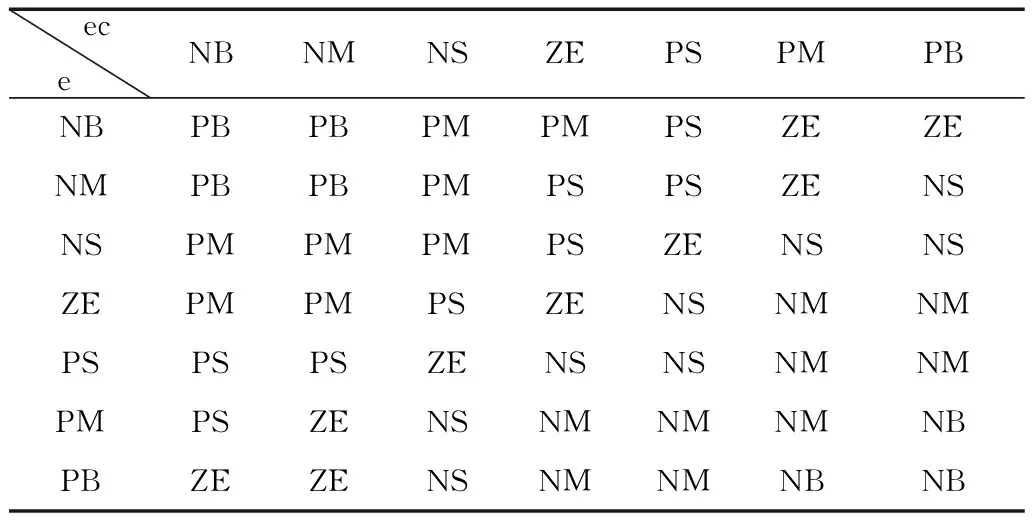
表1 Δkp模糊控制规则表
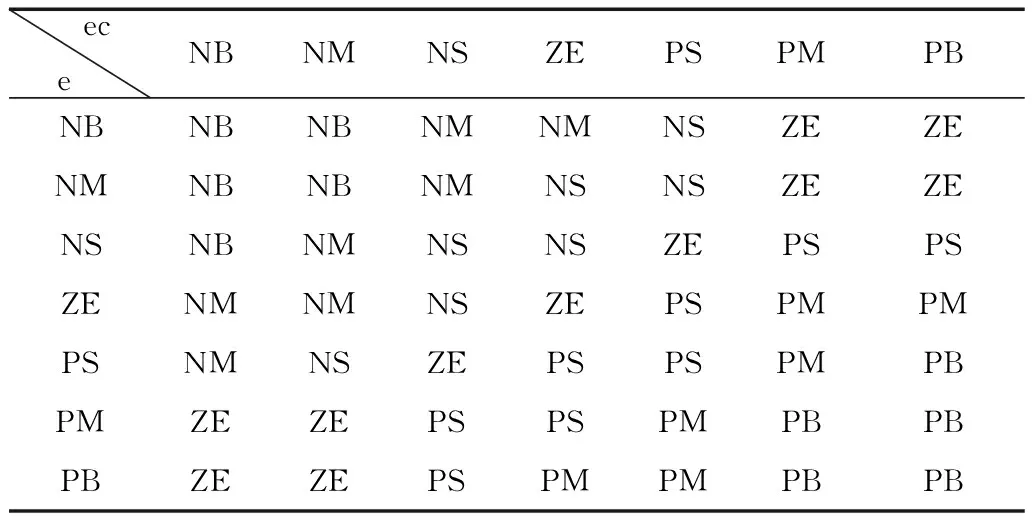
表2 Δki模糊控制规则表
在MATLAB/ Simulink中搭建模糊PI控制器,根据Simulink中所搭建的模糊PI控制器模型,得到Δkp和Δki的模糊控制面如图8所示。

图8 Δkp和Δki的模糊控制面
4 仿真分析
基于Matlab/Siulink搭建PMSM模型和模糊PI控制系统模型,仿真分析控制系统有效性。设定两组仿真工况,分别是工况一:电机目标转速1 000 r/min,目标转矩10 N/m;工况二:电机目标转速800 r/min,目标转矩7 N/m。仿真结果如图9所示。

图9 实际转速时域响应图
由图9可知,本文设计的控制器能够使永磁同步电机迅速达到目标转速,且超调量可忽略不计。图10给出了电机实际扭矩时域响应图,初始时刻电机出现了较大的转速突变,但控制器能够控制电机快速达到期望转矩,并保持转矩输出平稳。

图10 实际扭矩时域响应图
实际行驶工况,电机需要在短时间内切换多种转速。设定转速切换工况,对比传统PID控制和模糊PID控制的控制效果如图11所示。

图11 永磁同步电机转速图
从图中可以看出,传统PID控制系统不仅需要更长的时间到达期望转速,并且在转速突变点有较大的超调。模糊PID控制能够保证PMSM精确跟踪期望转速的同时,尽可能快的到达期望转速,保证了变速器换档过程的快速和平稳。
5 两档AMT台架试验
基于dSPACE和两档AMT实验台架验证本文设计的驱动电机控制器的有效性。实验台架由驱动系统、测试系统、传动系统、加载系统、工控机和基于dSPACE的测控系统组成。实验台架除机械连接外,各系统间均采用CAN通信。
试验过程中,需要测量的数据有AMT输入转速和转矩(驱动电机的输出转速和转矩)、AMT输出转速和转矩以及换档执行机构的位置信号。
试验过程中,模拟真实车辆一定车速下的升档和降档过程,以飞轮模拟整车转动惯量,测功机加载模拟空气阻力和路面滚动阻力。本文分别进行升档试验和降档试验。试验结果如图12、图13所示。

图12 试验电机转速时域响应图
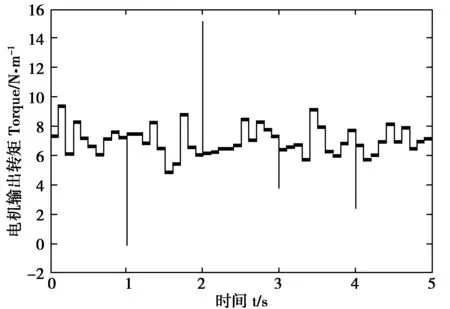
图13 试验电机转矩时域响应图
由图12、图13可知,本文设计模糊PI电机控制器,能够保证车辆准备、平稳的完成换档操作。
6 结论
针对无离合二档自动变速器永磁同步电机传统PID参数无法自整定的问题,提出了一种模糊自适应PI电机转速控制器,对永磁同步电机非线性、强耦合有良好适应性。仿真结果显示,该模糊自适应PI控制器在动态响应,系统超调,调节时间等方面均优于传统PID控制器,能够保证纯电动汽车两档变速器换档准确性、平顺性和实时性要求。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
防爆电机(2022年2期)2022-04-26
防爆电机(2022年2期)2022-04-26
电机与控制学报(2018年9期)2018-05-14