
基于树莓派的嵌入式智能安全帽设计与实现
2022-02-22 13:34马晓慧刘新恺马鑫磊王平川
物联网技术 2022年2期
马晓慧,刘新恺,2,马鑫磊,王平川,赵 康
(1.新疆工程学院,新疆 乌鲁木齐 830023;2.中国广核新能源控股有限公司安徽分公司,安徽 合肥 238056)
0 引 言
按照“碳达峰、碳中和”的政策引领,全国风电装机容量规模将持续提升,随之而来的是风电开发与维护的安全监管问题日益突出。与传统电厂不同,当前新能源发电场站具有地理位置偏远、占地面积大、运维人员少、检修工序多等特点,针对风电机组的登高作业空间有限、第三方外包人员管理困难、紧急事故通信受限等问题,亟需对当前的安全生产监管方法进行优化与改进。
当前广泛应用于电力行业的安全帽仅具有被动防护的单一功能,在智能化及信息化方面还处于概念设计阶段。文献[2]提出适用于电力作业的可穿戴安全监护平台,对智能安全帽的硬件结构进行设计。文献[3]对智能化安全帽的设计指标及过程进行了系统且全面的阐述,并搭建了Android手机端管理软件平台。文献[4]以物联网为载体,增加人脸识别功能,使安全帽成为电力设备的感知端和通信端。文献[5]开发了适用于电网巡检的智能安全帽系统和与之配套的智能安全柜,并进行了效果验证。
结合风电场运行维护安全监管需求,提出基于树莓派的嵌入式智能安全帽设计,在不改变安全帽结构及防护功能的基础上,通过增加智能化元件及远程管理平台,实现实时定位、视频监控、实时通信、安全照明、后台管理等功能。监控系统可以监控现场工作人员的操作是否按照工作票规范执行。同时,在遇到重大故障时能迅速将故障信息反馈到中控室,实现远程指挥,提高时效性。另外,将安全帽与定位相结合,如果发生紧急情况,工作人员可通过定位系统快速到达现场。
1 系统总体设计
该系统总体设计包括系统硬件设计、系统环境设计、定位功能设计、监控功能设计、UI界面设计。将3B+树莓派、L76X GPS HAT定位芯片、摄像头、LED灯等元件集成嵌入在安全帽上,将树莓派作为控制系统,将Nginx模块作为直播服务器,在局域网下通过网络连接PC端,满足实时监控、实时定位、安全照明等功能需求。
系统总体设计如图1所示。
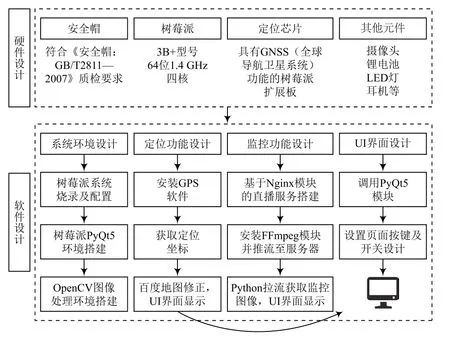
图1 系统总体设计
2 系统硬件设计
2.1 树莓派
树莓派3B+硬件参数:型号为博通BCM2837B0 SoC,集 成 四 核 ARM Cortex-A53(ARMv8)64位 @ 1.4 GHz CPU。主要接口:HDMI、以太网、4×USB 2.0、3.5 mm模拟音频视频插孔、MicroSD插槽。其他接口:DSI显示屏、40 pin,CSI相机接口、扩展双排插针(PoE)接口。有线网络:千兆以太网(USB 2.0通道,最大吞吐量300 Mb/s)。无线网络 :2.4 GHz和5 GHz双频WiFi,支持802.11b/g/n/ac。内存 :1 GB LPDDR2 SDRAM。蓝牙:蓝牙4.2&低功耗蓝牙(BLE)。存储:Micro-SD。供电接口/要求:micro USB(5 V/2.5 A)。尺寸:85 mm×56 mm×19.5 mm。重量:50 g。
2.2 定位芯片
采用L76X GPS HAT定位芯片,其具有GNSS(全球导航卫星系统)功能,支持GPS,BD2和QZSS等定位系统。
硬件参数:接收信道包括33个跟踪信道,99个捕获信道和210个PRN信道。接收信号为GPS,BD2和QZSS。信号频段为 GPS L1(1 575.42 MHz),BD2 B1(1 561.098 MHz)C/A Code。捕获时间:冷启动时10 s(最快);热启动:1 s。捕获灵敏度为-148 dBm,跟踪灵敏度为-163 dBm,重捕捕获灵敏度为-160 dBm,定位精度小于2.5 mCEP,串口通信波特率范围为4 800~115 200(默认9 600)。
2.3 摄像头
采用树莓派标准版摄像头(Raspberry Pi Camera v2),具体参数:8百万像素,系统支持新版本Raspbian,拥有专门的CSI接口及Sony IMX219PQCMOS图像传感器,尺寸为25 mm×23 mm×9 mm。
2.4 其他硬件
安全帽采用符合国标质检要求的标准安全帽,LED采用直流驱动,电压范围为1.5~3.5 V,电流为15~18 mA,采用有线式耳机。
3 系统软件设计
软件系统的设计主要分为系统环境设计、定位系统软件设计、监控系统软件设计、UI界面设计。
3.1 系统环境设计
系统环境设计主要分为树莓派烧录和配置、安装Python3 PyQt5库文件、导入OpenCV环境进行搭建,为后期调用摄像头和设置UI界面做准备。系统环境搭建流程如图2所示。
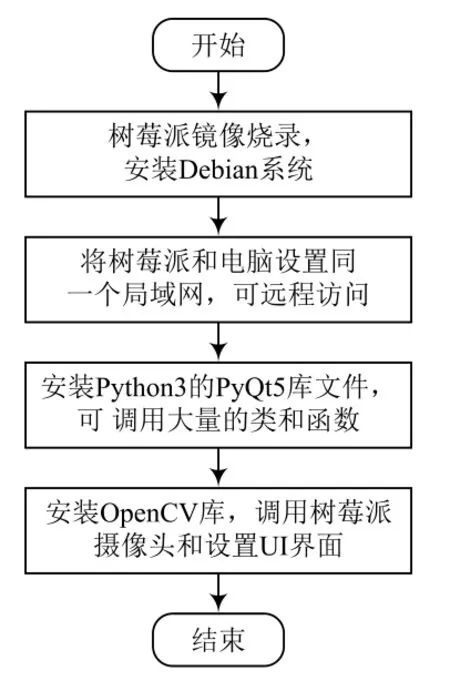
图2 系统环境搭建流程
3.2 定位系统软件设计
定位系统软件设计通过L76X GPS HAT芯片获取当前位置,得到经纬度坐标,并经过百度地图修正后将经纬度坐标储存在gsp.json文件中。接着,由PC端利用HTTP实时获取树莓派位置并显示在地图中。软件设计流程如图3所示。
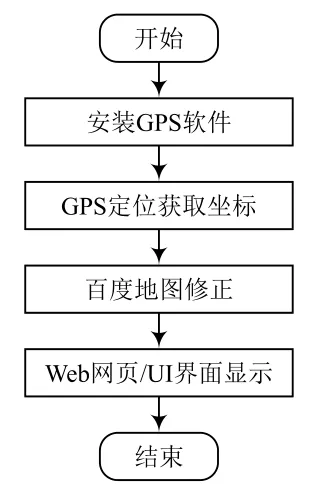
图3 定位系统设计流程
具体操作步骤如下:
(1)开启UART接口。首先打开树莓派终端,输入sudo raspi-config进入配置页面,选择Interface Options-serial,点击关闭shell访问,打开硬件串口,在终端中输入sudo reboot,重启树莓派。
(2)安装相关函数库。打开树莓派终端,依次安装BCM2835、wiring pi、Python函数库。
(3)打开minicom助手调试。打开树莓派终端,输入sudo apt-get install minicom 指令, 获取 GPS 坐标,“y”代表纬度约为42.96,“x”代表经度约为90.09,与百度地图标准经纬度比较后保存在gsp.json文件中,借助index.html即可在百度地图中显示当前位置。
3.3 监控系统软件设计
监控系统的设计主要包括两部分,即通过PC端的UI界面观看监控与将PC端的声音传输至树莓派端。
首先在树莓派端搭建基于Nginx模块的直播服务器,通过FFmpeg采集视频并使用H.264/AAC压缩后通过RTMP协议推流到直播服务器,然后在PC端通过PyQt5模块从直播服务拉流,借助OpenCV获取图片,并在IU界面显示,完成监控。PC端的声音传输过程按上述相反操作即可实现,监控系统设计流程如图4所示。
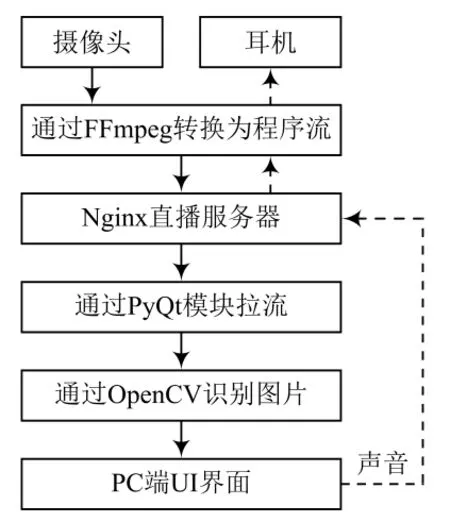
图4 监控系统设计流程
3.3.1 基于Nginx模块的直播服务搭建
Nginx模块是实现远程监控的服务器平台,直播原理:由树莓派端通过摄像头采集视频数据,经过转码等操作,基于RTMP协议发送到Nginx服务端,服务端接收到数据后保存到本地,PC端基于RTMP协议访问该服务端数据,经解码等操作后方可显示。
3.3.2 安装FFmpeg并推流至服务器
FFmpeg的名称来自MPEG视频编码标准,“FF”代表“Fast Forward”,FFmpeg是一套可以用来记录、转换数字音频、视频,并能将其转化为流的开源计算机程序,可以轻易实现多种视频格式的转换。
具体操作步骤:输入wget http://ffmpeg.org/releases/ffmpeg-3.0.9.tar.bz2,安装FFmpeg,并通过DSHOW采集扬声器数据以及摄像头数据,使用H.264/AAC压缩后推送到RTMP服务器。
3.3.3 使用Python拉流获得监控图像
使用Python从Nginx直播服务器中拉流,但此时导出的并非视频,因此需要解析视频流格式,然后将视频流格式转变为图片格式显示。一帧即一张图片,可通过OpenCV库获取,并快速显示在界面上。此时,就可以在监控界面看到摄像头拍摄的图像。
3.4 UI界面设计
UI界面设计:在Python中利用PyQt5库中的函数进行设计,其中包括页面设计、按键设计、开关设计等。UI界面设计流程如图5所示。
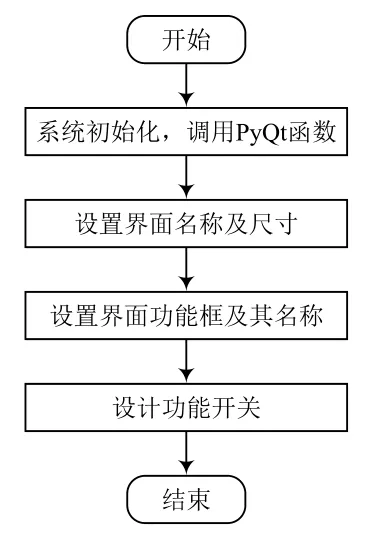
图5 UI界面设计流程
通过setWindowTitle(实时定位监控系统)语句编写UI界面的标题,通过QPushButton语句进行菜单布局。self.openGpsBtn = QPushButton(关闭定位)、self.openCamBtn =QPushButton(关闭监控)、self.openMicBtn = QPushButton(关闭麦克风)语句分别是关闭定位、关闭监控、关闭麦克风。通过self.gpsView.setFixedSize、self.camView.setFixedSize语句确定定位和监控屏幕尺寸。
UI操作界面设计如图6所示。
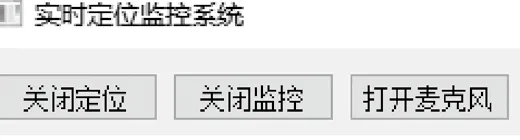
图6 UI操作界面设计
4 系统搭建与测试
4.1 安全帽实物搭建
将LED灯、定位天线、扩展板、锂电池、摄像头、耳机集成安装在安全帽上,粘贴布线简洁、美观、牢固。将定位天线的接收端放在安全帽外部顶端,将树莓派固定在安全帽内部顶端一侧,将锂电池固定在安全帽顶端的另一侧。锂电池通过USB线与树莓派相连,为树莓派供电。树莓派通过CSI接口与摄像头相连。摄像头处于安全帽前端的小孔处,用双面胶固定。耳机通过树莓派上的A/V插孔相连,从侧面小孔接出,搭建效果如图7所示。

图7 搭建效果
4.2 定位功能测试
定位功能可以实时检测安全帽的位置,经过对比,将安全帽放到屋外,可实时在地图中显示当前位置,当将安全帽放在屋内,至少需要2 min才能完成定位并在地图中显示,说明屋内、屋外环境对于定位功能的影响较大。
定位地图如图8所示。

图8 实时定位地图
4.3 监控功能测试
经过测试,画面的延迟约为2 s。点击“关闭监控”后,晃动安全帽时监控图像无变化。当点击“打开麦克风”后,程序可以调用电脑上的麦克风,这时对着电脑讲话,可以通过耳机听到。
摄像头监控画面如图9所示。

图9 摄像头监控画面
4.4 照明功能测试
通过安全帽一侧开关控制LED灯的开关,如图10所示。

图10 LED灯的测试
5 结 语
本文从风电场安全监管技术维护的角度出发,提出并设计了一种基于树莓派的嵌入式智能安全帽。此系统能实现定位、监控、通信、照明等功能,通过对安全帽进行测试,证明其效果较好。智能安全帽将是新能源发电行业面向信息化、智能化、物联网化发展的必要设备之一,能对风电场风机巡检、设备检修、外包人员作业进行实时有效的安全监察,后期还需在减轻负载、增设功能、提高供电效率等方面不断优化。
猜你喜欢
大众文艺(2023年22期)2023-12-10
大众文艺(2022年19期)2022-10-19
机电安全(2022年4期)2022-08-27
包装工程(2022年14期)2022-07-28
湖北农机化(2020年4期)2020-07-24
课外生活·趣知识(2019年4期)2019-09-10
电子制作(2019年11期)2019-07-04
电子制作(2017年17期)2017-12-18
中国酿造(2016年12期)2016-03-01
华东理工大学学报(自然科学版)(2014年3期)2014-02-27
