
双发轻型民用直升机高高原试飞方法研究
2022-02-22 08:58李生伟赵德杨林长亮
航空工程进展 2022年1期
李生伟,赵德杨,林长亮
(哈尔滨飞机工业集团有限责任公司 飞机设计研究所,哈尔滨 150066)
0 引 言
H425-100 型双发轻型直升机是哈尔滨飞机工业集团有限责任公司在H425 型机基础上换装大功率发动机和新型航电系统研制的新型直升机。与H425 型直升机相比,H425-100 型机改善了高原飞行性能,适合中国西部高原地区使用。
根据适航规章要求,为验证直升机高原飞行性能和飞行特性,需进行高原试飞工作。国外对直升机高原适航验证试飞方法研究比较成熟。F.Gallagher 等研 究 了K-1200 型 直 升 机 的 高 原 性能,指出直升机高原性能依赖于许多因素,最重要的有旋翼性能、发动机性能、纵向操纵余量和自转能力等,根据飞行试验验证的4 600 m 密度高度下K-1200 型直升机的参数,外推了9 100 m 密度高度下直升机的高原性能,但是外推得出的性能结果缺乏实际飞行的验证;J.Schillings 等研究了Bell 412EPI 型直升机适航验证试飞方法,高原试飞科目包括悬停性能、近地面机动、极限高度速度包线和A 类起飞着陆性能等,但是只在中等高度条件下进行了试飞;C.Ockier 等研究了H145 型直升机在高高原条件下的适航验证试飞方法,在4 000 m 海拔高度的高高原进行了A 类起飞、极限高度速度包线、近地面机动能力等科目的试飞,并在5 420 m 海拔高度进行了B 类起飞试飞。
国内对直升机高原适航验证试飞技术缺乏系统研究。田磊等基于直升机高原试飞结果研究了直升机在不同离地高度下悬停时的地面效应函数模型,确定的地面效应函数模型以直升机无地效悬停性能为基准,但是没有研究准确地确定直升机高原无地效悬停性能的方法;宋招枘等研究了直升机高原滑跑起飞性能试飞技术,提出了最大起飞质量的估算方法,但是滑跑起飞方式主要是军用直升机在特殊环境条件下使用,民用直升机很少使用;李令等研究了直升机极限高度速度包线试飞方法,但是对于多发直升机极限高度速度包线试飞方法研究不足。
本文研究适航规章对高高原试飞的要求,确定每种试飞科目的试飞方法;应用确定的试飞方法在海拔高度3 950 m 的玉树巴塘机场进行H425-100 型机高高原试飞。
1 适航规章对高高原试飞的要求
根据市场需求,H425-100 型机设计的使用包线如图1 所示,其中Ⓐ为起飞和着陆包线,Ⓑ为飞行包线。

图1 H425-100 型机高度温度包线Fig.1 Altitude temperature envelope of H425-100
H425-100 型机最大起飞着陆高度设计目标为4 572 m 密度高度。为获得适航批准,需要在接近最大起飞着陆高度的条件下进行试飞。
民用适航规章允许将近地面机动能力和极限高度速度试验数据由演示试验高度外推600 m,悬停、起飞和着陆性能试验数据可以外推至最大1 200 m 密度高度。因此,为获得4 572 m 密度高度条件的批准,需要在超过3 972 m 密度高度条件进行高高原试飞。
按照H425-100 型机适航验证试飞计划,在9~10 月之间进行高高原试飞,试飞时的环境温度在0~10 ℃之间。为满足密度高度超过3 972 m 的要求,试验地点压力高度应超过3 650 m。综合西部地区民用机场的海拔高度和机场交通以及保障设施条件,最终选择海拔高度约3 950 m 的青海省玉树巴塘机场作为高高原试飞地点。
2 试飞方法和数据处理方法
2.1 悬停性能
直升机悬停性能是制定起飞着陆和极限高度速度包线试飞计划的基础。采用系留悬停法试飞效率高,试飞时容易控制悬停高度,试验数据准确。
因巴塘机场没有适宜的系留设施,试飞团队研制可移动式系留平台,如图2 所示。在巴塘机场停机坪组装系留平台,试飞时通过直升机外吊挂吊钩连接系留钢索。系留钢索长度根据试飞大纲规定的有地效悬停高度和无地效悬停高度确定。

图2 移动平台悬停系留试验Fig.2 Tethered hover test with removable platform
试飞时在试飞点附近设置便携式气象站,测量环境温度及风速等数据。按照适航规章要求,试飞时风速不得超过1.5 m/s。
通过叶素和动量理论建立直升机悬停所需总功率的理论模型,如式(1)所示。

式中:为旋翼桨盘面积;C为旋翼桨叶叶素平均型阻系数;为直升机悬停需用功率;为旋翼桨盘半径;为直升机旋翼拉力,可以认为其值等于直升机悬停质量;为旋翼转速;为直升机功率传递系数;为空气密度;为旋翼实度。
假设旋翼转速的影响可以忽略,型阻系数为常数,将上述关系式进行无因次化处理。对于大多数常规旋翼工作状态,需用功率与旋翼拉力关系可以整理为

对于给定直升机:
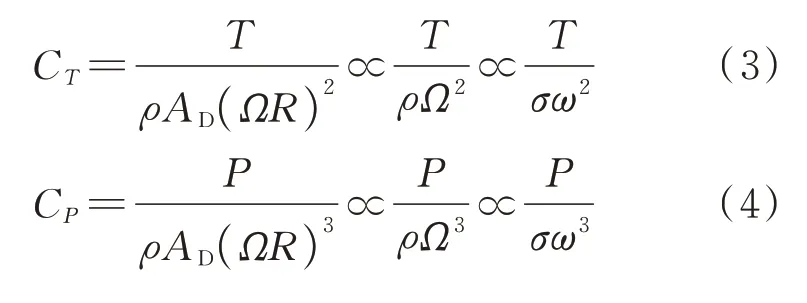
式中:为密度比,即直升机实际飞行环境下空气密度与标准大气密度之比;为旋翼转速比,即直升机实际飞行时的旋翼转速与旋翼额定转速之比。
悬停性能试验的目的即确定和验证上述关系的准确形式,用于后续的性能扩展,其中变量和可以通过悬停试验获得,拉力系数由系留悬停试验中一系列的拉力条件确定,功率系数由与之相应的功率条件确定。
OH-58A 直升机(NACA 0012 翼型)从试飞数据中获得的广义悬停性能可以表示为C与的关系曲线,如图3 所示。当C的值较大时,线性曲线拟合与真正的数据不一致,线性形式只是C为中等值时的合理假设。假如只在小的C值时取悬停试验数据,则以线性曲线拟合形式外推广义的悬停性能会引起较大误差。基于这个原因,FAA(美国联邦航空管理局)只允许悬停性能数据的外推和/或内推到最大1 200 m。因此尽可能在大的C范围内从冬天的接近海平面到夏天的高空条件下搜集广义数据的悬停性能试验。
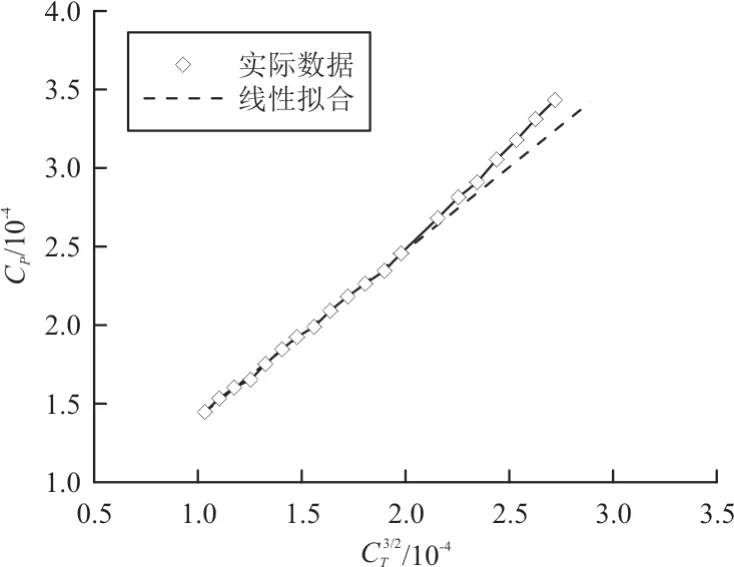
图3 OH-58A 广义悬停性能Fig.3 The generalized hover performance of OH-58A
2.2 模拟单发模式调整
极限高度速度包线、起飞着陆性能试飞都需要使用单发工作功率状态,而单发工作功率状态累计使用时间达到规定值后,发动机需进行相应的检查维修工作,这将严重影响试飞工作进度。因此,新型发动机普遍提供模拟单发模式用于飞行员训练以及试飞。H425-100 型机也设计有模拟单发模式,该模式的基本原理是使两台发动机工作在小功率状态,两台发动机输出功率之和等于相应的单发应急功率。另外,通过调整控制参数,模拟单发模式还能够模拟发动机失效时的瞬态变化。
为保证模拟单发模式准确模拟发动机失效后的动态过程,在进行涉及发动机失效的试飞科目前,首先进行模拟单发模式调整试飞,然后进行真实发动机失效试飞,最后进行模拟单发模式试飞。试飞过程中飞行员维持直升机总距操纵不变,只控制直升机姿态和航向。根据试飞结果调整模拟单发模式控制参数,最终使模拟单发模式动态变化过程以及稳定输出功率与真实发动机失效相一致。
2.3 极限高度速度包线
极限高度速度包线不仅取决于直升机性能,飞行员的操作时机对包线结果有直接影响。只有在飞行试验中才能准确确定极限高度速度包线。
如果在试验前能够预估极限高度速度包线,将极大地降低试验工作量和试飞风险。不过目前对极限高度速度包线的试飞研究主要针对单发直升机,试飞获得的极限高度速度包线回避区结果远大于双发直升机在一台发动机不工作情况下的回避区。计算方法或者基于某些机型的试飞结果过于简单,或者基于优化算法等现代技术过于复杂,都不适于试飞前预估计算。因此极限高度速度包线是所有直升机性能试验项目中可预测性最低的。
极限高度速度包线试验一般采用逐步接近方法。下边界试飞由低高度的有地效悬停开始,使用模拟单发模式模拟发动机失效,飞行员操纵直升机安全着陆。在确认着陆的安全性后增加悬停高度重复试验,直至获得极限高度速度包线边界点为止。速度增加10~20 km/h 后继续试验,寻找包线边界上的下一个点。上边界试飞由高高度的无地效悬停开始,采用类似的试验顺序逐渐寻找包线边界点。
2.4 起飞着陆性能
直升机常规起飞程序,要求按定义的起飞剖面进行起飞,爬升至15 m。起飞剖面的定义与最大起飞质量密切相关,应保证直升机能得到这样的加速度,即在与HV 边界留有9 km/h 安全余量及满足功率要求的前提下,随后加速至爬升速度。试飞目的是通过试飞(结合HV 包线试飞)确定并验证直升机B 类起飞剖面,然后按该剖面进行试验以对其最大起飞质量进行验证试验,同时检查其起飞距离。上述过程基于试飞数据扩展为起飞图表。
起飞距离与压力高度和外界大气温度相关。将起飞距离简化为
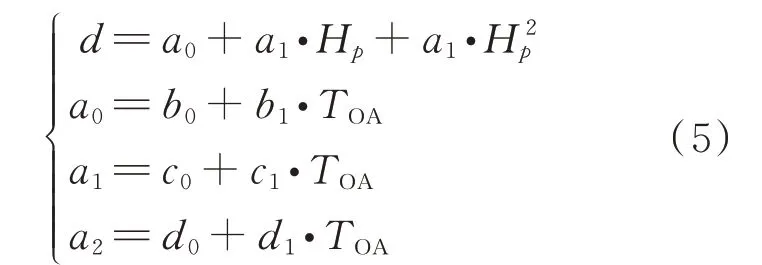
式中:H为压力高度;为外界大气温度。
根据试验结果,可以确定公式(5)中的系数、、、、和,进而得到在整个使用包线内的B类起飞距离结果。
着陆性能即净空越过50 ft(1 ft=0.304 8 m)障碍后需要的着陆距离,注意着陆航迹同样需要避开极限高度速度包线,将B 类着陆飞行分为空中段和地面段两个阶段。假设每个阶段都是等减速运动,由运动学原理可以得出着陆过程中轴向风速、空中段进入空速、接地速度、空中段水平距离、地面段水平距离以及相应加速度、之间的简化关系。
空中段的减速度为

地面段的减速度为

进而可以将试验点的数据修正至0 风速及不同风速状态。
2.5 近地面机动能力
适航规章要求在不小于8 m/s 的风速下,直升机在地面或近地面处,进行任何机动飞行不会丧失操纵。近地面机动能力通过直升机沿各种方位进行侧飞和后飞来评价。试验在无风条件下进行,事先根据机场跑道方向计算直升机进行各种方位飞行时需要保持的磁航向。试验时首先在悬停状态调整直升机航向至需要的方向,试飞员操纵直升机沿跑道加速飞行,加速至规定速度后保持一段约15~30 s 的稳定飞行。在一次飞行中能够获得一个方位直到最大允许速度的所有结果。
直升机近地面机动能力主要由尾桨设计所决定。进行近地面机动能力试飞时,为方便驾驶员了解直升机能力,在驾驶杆和脚蹬处加装软尺。在接近操纵限制时试飞员可以通过软尺数据粗略判断操纵余量。
3 试飞结果和分析
3.1 试飞概况
为确定H425-100 型机高高原性能,2017 年10月9~24 日,在玉树巴塘机场完成了H425-100 型机高高原试飞工作,共飞行29 架次、17 h。
采用系留悬停法进行了悬停性能试飞。试飞结果扩展了H425-100 型机广义悬停性能曲线。
在验证了单发模拟模式与真实单发动态特性的一致性基础上,使用单发模拟模式进行极限高度速度包线试飞,确定了在高高原条件下的极限高度速度包线。在巴塘机场完成无地效悬停质量下完整的极限高度速度包线试飞,还进行最大起飞质量即有地效悬停质量下的极限高度速度包线下边界试飞。
在巴塘机场进行两种起飞航迹的起飞距离试验。试验质量分别为无地效悬停质量和有地效悬停质量,演示在起飞过程中一台发动机不工作后安全返回并停在起飞场地的能力,还进行这两种质量的着陆距离试验。
采用沿给定方位进行飞行的方法演示H425-100 型机在高高原的近地面机动能力。共完成八个方位的飞行试验,相邻两个方位相差45°。
3.2 悬停性能
直升机悬停性能试验结果通常采用无量纲系数进行处理和分析。悬停性能计算方法是计算在各种压力高度和环境温度组合条件下可用功率等于需用功率时的直升机质量。每个试验场地的悬停试验分有地效和无地效,可分别生成一条悬停曲线,对应于广义的悬停性能曲线描述:

式(8)中确定合适的和值,即可计算任意给定大气条件和功率情况下的质量。
对无地效悬停试验测试数据进行无量纲处理后,获得的直升机悬停时拉力系数与功率系数关系及在低高度获得的结果如图4 所示,可以看出:在高原条件下,直升机仍具有足够的旋翼能力;无量纲系数关系与低高度结果相一致。
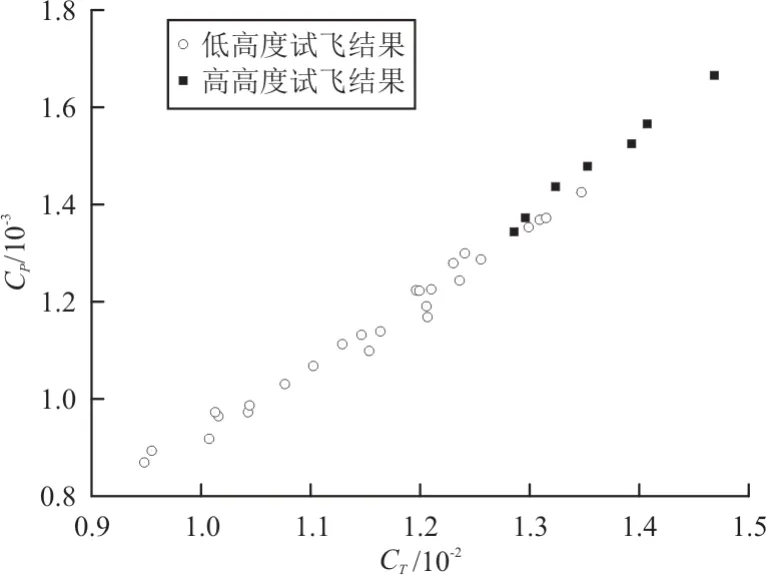
图4 无地效悬停性能试验结果Fig.4 Test result of OGE hover performance
试验时压力高度3 751 m,环境温度为9 ℃,获得的最大有地效悬停质量为4 069 kg,最大无地效悬停质量为3 583 kg。
计算悬停性能曲线,即计算在给定的H和组合条件下的最大悬停质量。首先采用发动机性能计算程序计算可用功率,随后使用得到的悬停极曲线公式计算在可用功率等于需用功率时的换算质量,如式(9)所示。
3.3 单发模拟模式调整结果
真实发动机失效和调整后的模拟单发模式在发动机失效后的扭矩和旋翼转速变化历程结果,如图5 所示,可以看出:模拟单发模式的稳定输出功率与真实单发相同,在过渡过程中模拟单发模式的输出扭矩与真实单发略有差别,但模拟单发模式和真实单发在过渡过程中的旋翼变化基本相同。由于试验时旋翼总距保持不变,旋翼转速变化相同表明旋翼升力变化相同。可以认为,调整后的模拟单发模式与真实发动机失效两种状态下直升机具有同样的动态响应。

图5 真实单发与单发模拟模式动态特性Fig.5 Transient characteristic of real OEI and OEI simulating mode
3.4 极限高度速度包线结果
极限高度速度包线试验结果如图6 所示。图中完整的包线是适航规章要求的无地效悬停质量下的结果,试飞质量为3 600 kg,试验时的平均压力高度为12 294 ft,平均环境温度为5.4 ℃。试验得出的悬停低点高度为3 m,悬停高度高度为83 m,膝点高度为15 m,速度为55 km/h。
单独的极限高度速度包线下边界是有地效悬停质量下的结果如图6 所示。 试飞质量为4 000 kg,试验时的平均压力高度为3 748 m,平均环境温度为6 ℃。在有地效悬停质量下,极限高度速度包线悬停低点高度为1.8 m,膝点高度为15 m,速度为74 km/h。
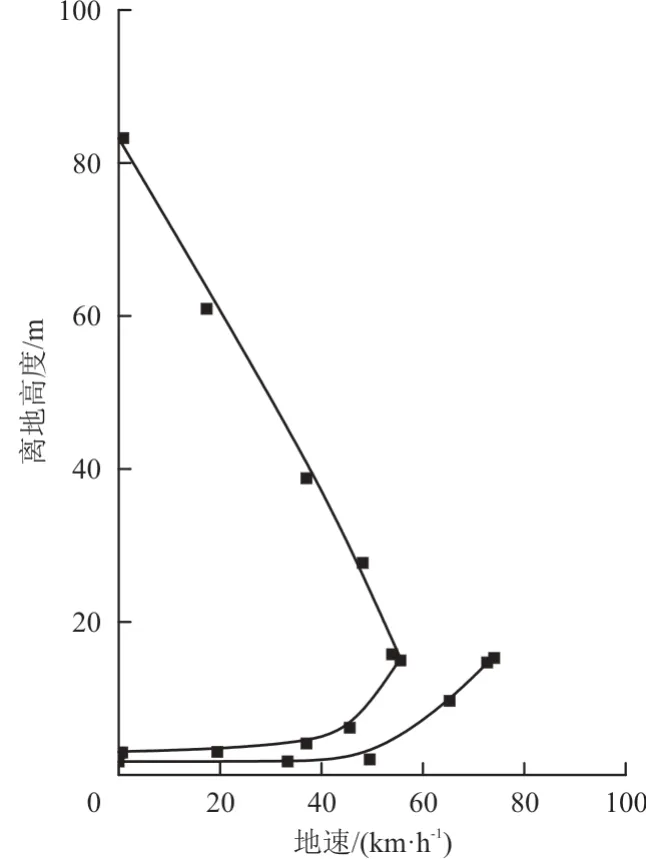
图6 极限高度速度包线试验结果Fig.6 Test results of height velocity envelope
3.5 起飞着陆性能结果
根据极限高度速度包线试验结果,综合起飞时的驾驶技术难度以及直升机飞行性能,制定了两种起飞剖面。起飞剖面1 与在平原和次高原地区使用的起飞剖面相同。在玉树进行试验的环境条件下,起飞剖面1 适用于起飞质量小于3 600 kg情况,能够保证在最大起飞质量下起飞剖面距极限高度速度包线回避区最小间隙不小于9 km/h。与起飞剖面1 相比,起飞剖面2 增大了起飞速度,适用于直升机起飞质量超过3 600 kg 情况。
起飞剖面1 试验质量为3 600 kg,试验时压力高度为3 732 m,环境温度为15 ℃,多次试验得到的起飞距离平均值为208 m。
起飞剖面2 试验质量为4 100 kg,试验时压力高度为3 755 m,环境温度为14 ℃,多次试验得到的起飞距离平均值为515 m。
以起飞着陆试飞数据为基础,采用最小二乘法拟合起飞距离和着陆距离公式。通过拟合公式可以计算在其他高度温度条件下的起飞距离和着陆距离性能。
根据试飞结果,高度与外界大气温度可以通过试飞直接测得,距离可用D-GPS 得到,通过数据处理可以确 定公式 中的系数、、、、和,进而得到在整个使用包线内的B 类起飞距离结果。
H425-100 型机B 类着陆剖面为在离地高度15 m 时以83 km/h 速度进场,在离地高度5 m 时操纵直升机减速,以约37 km/h 速度着陆,使用机轮刹车和旋翼操纵使直升机滑跑一段距离后完全停止。

进行质量为3 600 和4 000 kg 的双发着陆和单发着陆试验,试验结果表明在着陆过程中直升机需用功率较小,发动机工作状态对着陆距离结果影响较小。由于3 600 kg 时接地前减速效果比4 000 kg 更明显,接地速度小,因此3 600 kg 时的着陆距离比4 000 kg 时要短。3 600 kg 着陆试验时压力高度3 810 m,环境温度8 ℃,风速1 m/s。双发着陆距离平均值为262 m,单发着陆距离平均值为283 m。4 000 kg 着陆试验时压力高度3 749 m,环境温度6 ℃,风速2 m/s。双发着陆距离平均值为387 m,单发着陆距离平均值为434 m。
3.6 近地面机动能力结果
在高高原,近地面机动能力通常受到航向操纵限制。H425-100 型机在左侧飞时操纵量随侧飞速度的变化规律如图7 所示,可以看出:随着侧飞速度增加,航向操纵量增加。如果以10%操纵行程作为操纵余量,左侧飞最大速度为8 m/s。
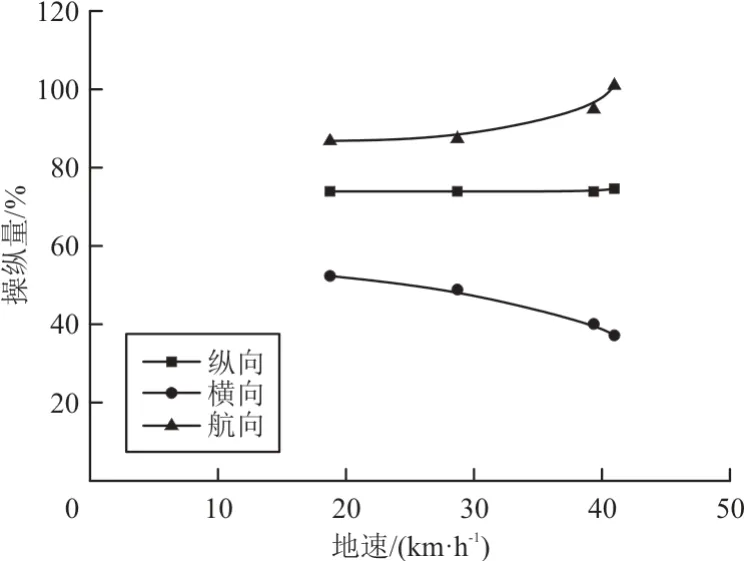
图7 操纵量随左侧飞速度变化规律Fig.7 Control positions chance with left sideward speed
以航向操纵留10%行程余量为标准确定的不同方位的最大速度结果及左前极限重心和右前极限重心两种状态的试验结果如图8 所示。

图8 近地面机动最大速度试验结果Fig. 8 Test results of the max speed in maneuver near ground
从图8 可以看出:H425-100 型机近地面机动的临界方位为左侧飞和后飞;左前重心的最大速度略小于右前重心,但区别不是十分明显。
4 结 论
(1)在高高原地区,由于天气条件多变,满足悬停性能试飞风速要求的天气十分难得,采用高效率的系留悬停法可以获得更准确的试验数据。
(2)在高高原地区,使用模拟单发模式进行极限高度速度包线等高风险试飞科目可以有效地降低试飞风险,保证试飞工作顺利完成。
(3)与性能理论计算方法和工程仿真模拟方法相比,以起飞着陆试飞结果为基础,使用拟合方法获得直升机起飞距离和着陆距离的计算公式,可以更准确地确定直升机起飞着陆性能。
H425-100 型机高高原适航验证试飞是国内首次在高高原地区系统地完成适航规章要求的所有验证科目的试飞。H425-100 型机已获得中国民用航空局颁发的型号合格证,本文介绍的高高原试飞中所采用的试验方法已获得中国民用航空局的认可,对今后同等级的国产双发民用直升机适航验证工作具有重要的借鉴意义。
猜你喜欢
环球时报(2022-09-15)2022-09-15
航空学报(2022年7期)2022-09-05
发明与创新·中学生(2022年6期)2022-05-22
家教世界·创新阅读(2020年4期)2020-06-03
当代工人·精品C(2020年1期)2020-05-20
家教世界·创新阅读(2020年1期)2020-05-11
科技创新与应用(2020年10期)2020-04-24
家教世界·创新阅读(2020年2期)2020-04-07
航空模型(2017年3期)2017-07-28
第二课堂(小学版)(2009年9期)2009-11-13
