
基于跟踪微分器的载体角速率算法研究
2022-02-21 04:42:54孟卫锋史永杰李联涛赵芃沛刘明雍
兵器装备工程学报 2022年1期
孟卫锋,李 静,史永杰,李联涛,赵芃沛,刘明雍
(1.嘉兴职业技术学院, 浙江 嘉兴 314036; 2. 63796部队, 四川 西昌 615000;3.陕西空天动力研究院有限公司, 西安 710103;4.西北工业大学 航海学院, 西安 710072)
1 引言
某型号四环三轴惯性稳定惯导平台,作为载体飞行控制系统的核心测量设备,可以为载体建立飞行基准,实时测量载体的飞行速度、加速度等数据,并输出载体姿态角信息。出于特殊需要,在不额外安装载体角速率测量元件的前提下,系统要求惯导平台能够实时输出载体的高精度角速率信息,并用于飞行姿态控制。这相当于对传统惯导平台的要求上增加了新的功能及指标,国内尚无此类先例,也没有相关经验可以借鉴,这对该型号平台的研制提出了新的挑战。
四环三轴惯性稳定惯导平台上安装有框架角测量系统,用于测量载体姿态角,要实时得到载体的高精度角速率信息,只能利用载体姿态角信息。需要研究一种高精度算法对姿态角信息进行相关处理后,得到载体的角速率。高精度载体角速率计算方法需要考虑以下主要问题:
1) 该计算方法要求能够准确、快速实时地算出载体的角速率信息;
2) 该计算方法要求能够消除因载体机动、台体微振、电磁干扰引入的随机噪声;
3) 该计算方法要能够实现从载体坐标系到框架坐标系的高精度转换。
2 框架角测量系统的功能及组成
平台框架角测量系统是测量平台体轴、内环轴、外环轴和随动环轴姿态角大小的装置总称。在四环平台系统中,采用双通道旋转变压器和轴角转换电路,为平台控制电路提供各轴姿态角在0~360°范围内的线性数字量输出。
平台框架角测量系统包括机械部分和电路部分。机械部分由双通道旋转变压器组成,分为粗通道和精通道。其转子部分安装在平台的各个轴上,定子部分安装于对应的内环、外环、随动环和基座上。电路部分由轴角转换芯片及其外围电路组成。
3 框架角测量元件的设计选型
平台框架角测量系统主要功能器件为双通道旋转变压器及双通道RDC转换器。
双速RDC转换器是金属壳封装的单块集成电路,内部包含粗精两路旋转变压器—数字转换器和一个双速系统所必需的纠错逻辑电路,输出为自然并行二进制数码,最高可达20位,带三态锁存器。
4 框架角测量电路设计
平台框架角测量系统工作原理如图1所示。
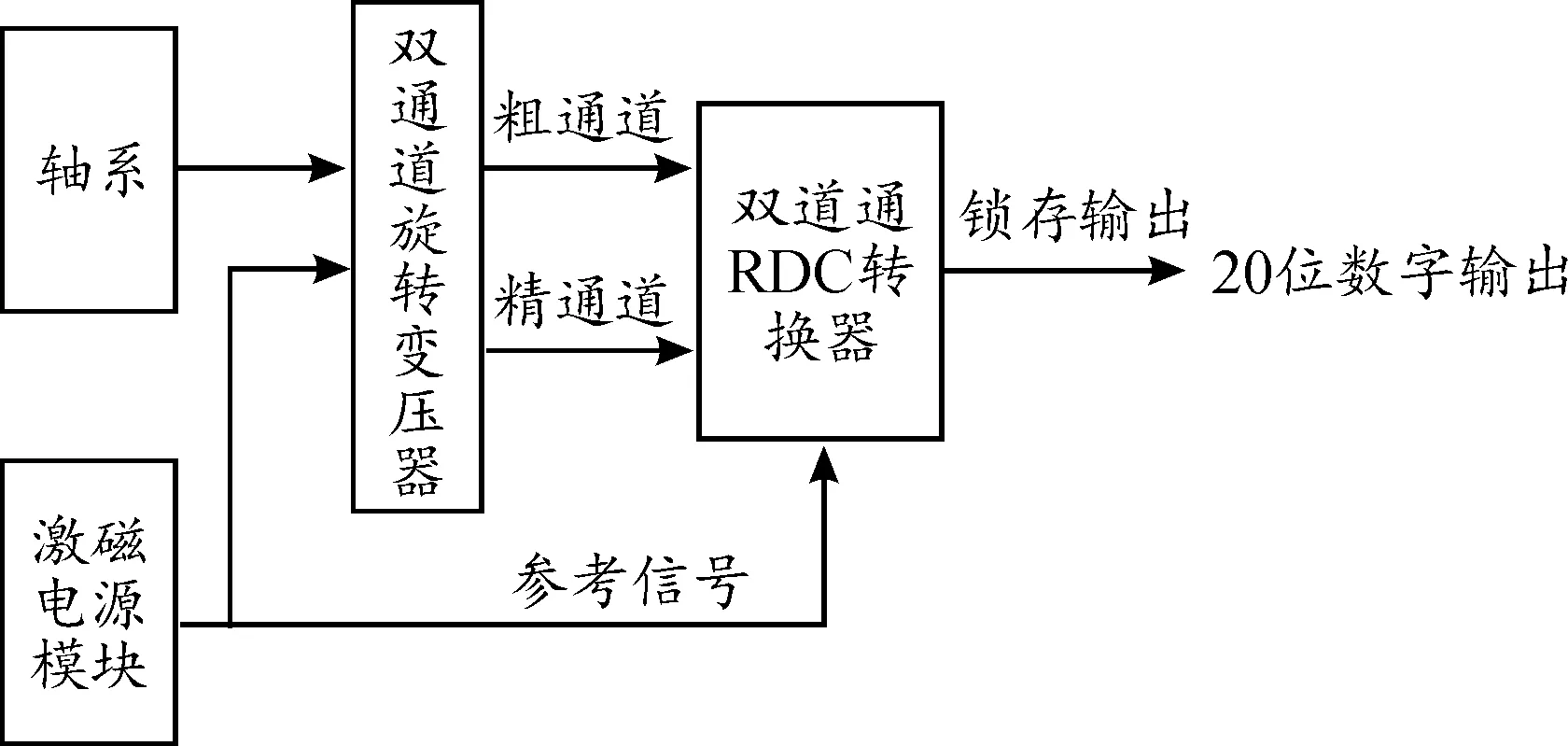
图1 平台框架角测量系统工作原理框图
5 角速率信号提取
5.1 载体角速率与框架角速率转换关系
载体角速率提取的原理是在获得框架角信息基础上,经过微分算法得到框架角的微分信号,即框架角速率,再通过框架角速率与载体角速率的转换关系矩阵,得到载体实时的角速率。
四环架平台各坐标系如图2所示。

图2 四轴平台各坐标系
图2中,为台体坐标系,为载体坐标系,各框架绕其框架轴正向转角由内向外分别定义为、、、′。读取4个框架角信息作为跟踪微分器的输入信号,输出4个框架角信息的微分信号。
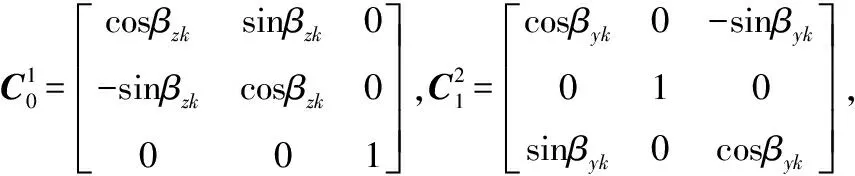
经过推导最终得到载体角速率与四环平台台体角速度、框架角速度之间的一般关系为:

(1)




5.2 角速率信号计算方法设计与仿真验证
高精度载体角速率提取计算,是依靠平台本身提供的角位置信息通过算法设计得到载体的角速率。高精度载体角速率计算方法将主要考虑以下问题:
1) 该计算方法要求能够快速实时得到载体的角速率信息;
2) 该计算方法要求能够消除因载体机动、台体微振、电磁干扰引入的随机噪声。
自抗扰控制(ADRC)是一种基于非线性控制理论的控制技术,能够对不确定因素进行补偿。基于该技术的控制器已成功应用于许多复杂的非线性控制问题。非线性跟踪微分器(TD)作为自抗扰控制器的重要组成部分,以其抗干扰能力强、复杂度低、实时性好等优点被广泛应用于各种差分或微分信号处理中。在实际工程中,TD可以解决从含有不连续或随机噪声的测量信号中提取连续信号和差分及微分信号的问题。跟踪微分器在调整并选取合适的参数时具有很强的滤波功能。
二阶快速最优控制积分器串联型系统为:
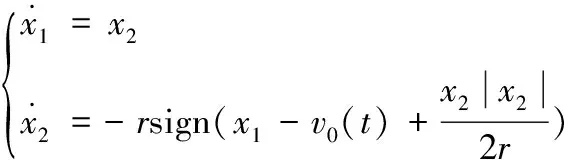
(2)

如把离散系统

(3)
的最速控制综合函数记作(,,,),则其算法公式=(,,,)为:
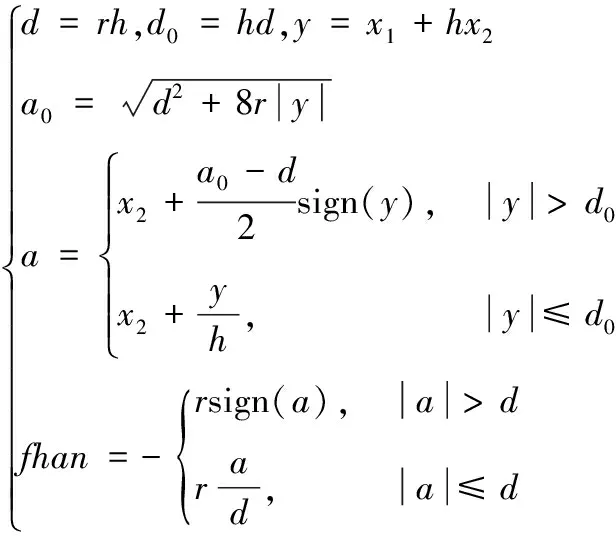
(4)
将=(,,,)代入到系统(3)中,得:

(4)
从非零值出发,按着上述差分方程递推,就能以有限步到达原点并停止不动。用()-()代替(),即可得到离散化的跟踪微分器为:
(5)
由于框架角信号被噪声污染,速度曲线进入稳态时刻会出现超调现象,这种超调现象会加剧对微分信号的噪声放大效应,为了消除速度曲线中的这种超调现象,把函数(,,,)中的变量改为与步长独立的新变量,而取为适当大于步长的参数,就能消除速度曲线中的超调现象,从而能很好地抑制微分信号对噪声的放大。把中的换成得到新的离散形式跟踪微分器为:

(6)
式(6)中:是积分步长;是决定跟踪快慢的参数。越大,更快地跟踪信号,但当被噪声污染时,会使信号被更大的噪声所污染。为了滤掉所含的噪声,选取适当的,能获得很好的滤波效果。然而,越大,就会使跟踪信号的相位损失也越大。
式(6)为最速微分跟踪器的离散形式,被广泛应用到自抗扰控制器中,被用来安排过渡过程提取微分信号的跟踪微分器。由于从跟踪微分器得到了原始信号的微分,受到物理学中位移公式的启发,采用预报的方法来克服延迟。思路是将滤波后得到的信号加上微分信号与预报步长的乘积作为原始信号的逼近,具体的做法是令函数中的=*,为滤波因子系数,待调参数,为预报步数,将=+**作为原始信号的逼近。而的值,通过寻找滤波因子和延迟步数的关系来确定。一般跟踪延迟步数大致是的2倍,所以可取=2;范围一般在3~10之间,太小的话滤波效果不好,而太大的话则会可能使相位滞后太多。
仿真验证中,跟踪微分器的输入为sin(20π)+001rands()(加入幅值为001的高斯白噪声),仿真结果如图3、图4所示。
图3、图4分别为最速跟踪微分算法的跟踪输出和微分输出曲线。从图中可以看出,最速跟踪微分算法的微分输出曲线较为平滑,能够满足工程上的需要,采取预报方法后,其跟踪信号能够跟踪上原始信号,并且滤掉了干扰信号。
根据上述仿真结果可以看出:TD能够在大噪声背景下,以较高的精度跟踪输入信号,同时估计出输入的微分信号。

图3 最速跟踪微分算法的跟踪输出曲线

图4 最速跟踪微分算法的微分输出曲线
5.3 试验验证及数据分析
在获取跟踪微分器的具体形式以及对特定有随机噪声的输入进行数字仿真后,需要对设计的惯性平台角速率算法进行实际试验验证,以考察算法的可行性和有效性。对试验方案进行了详细设计,并搭建了试验测试平台。主要分为2个阶段:
1) 利用某高精度单轴光纤惯组进行验证。具体是将某单轴光纤惯组安装在转台上,采集该单轴光纤惯组上旋转变压器输出的角度信号和同轴光纤速率陀螺的角速率输出信号,经过速率计算方法,得到估计的角速率信号与光纤陀螺的角速率信号并进行对比,以验证速率计算方法的正确性,并以此对速率计算方法进行调试优化;
2) 将已调试好的角速率计算方法写入数据处理计算机中,利用惯性平台在三轴转台上进行试验,采集各个框架角输出信号并进行角速率提取计算。
由于某单轴光纤惯组自身的光纤陀螺敏感轴与其旋转变压器不同轴,根据角速率提取试验的需要对线路、采集处理软件等进行了针对性改进。
利用某单轴光纤惯组搭建角速率计算方法测试平台,使用搭建好的试验平台,用手拨动框架以模拟框架角变化的动态过程,采集旋变信号和陀螺输出信号,试验过程中每5 ms保存一次数据。采集的数据经过处理后,框架角信息经过所设计的角速率信号计算方法后得到其跟踪信号和微分信号,结果如图5、图6所示,图7为图6中第7~16 s的局部放大图。
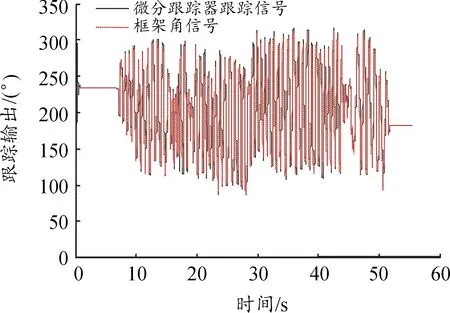
图5 算法处理后的框架角信息跟踪输出曲线
从图5可以看出,当框架角信息无明显规律变化时,跟踪输出信号能够跟踪其框架角信息。
从图6和图7中微分输出与陀螺的输出对比分析可知,通过平台框架角传感器输出信息获取载体角速率信息,原理可行;微分计算方法能够正确反映角速率的变化,较为精确,时延较小。

图6 算法处理后的框架角信息微分输出曲线
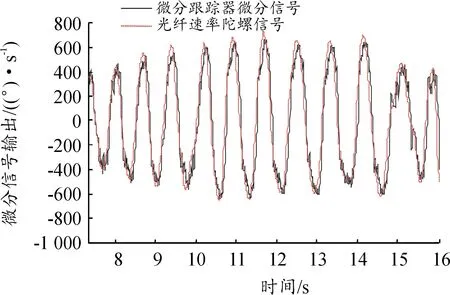
图7 图6的局部放大图
6 结论
本文利用TD跟踪微分器对载体角速率信号进行解算和信息提取。仿真及实际试验证明,所设计的用TD跟踪微分器能够在大噪声背景下,以较高精度解算载体加速率。方法原理简单,实现较为方便,具有较为重要的工程应用价值。
猜你喜欢
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:38
小资CHIC!ELEGANCE(2022年1期)2022-01-11 00:49:59
数学物理学报(2021年2期)2021-06-09 08:54:26
数学物理学报(2020年3期)2020-07-27 01:19:46
数学物理学报(2019年5期)2019-11-29 07:46:34
法大研究生(2017年1期)2017-04-10 08:55:06
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
现代工业经济和信息化(2016年2期)2016-05-17 05:34:16
中国医学影像学杂志(2015年9期)2015-12-15 11:03:26
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:21
