
不同航高对无人机航测地形制图精度影响研究
2022-02-21 13:39:04陶顺勇杨培兵
水利水电快报 2022年2期
陶顺勇 杨培兵


摘要:为研究不同航高对航测地形图精度的影响,采用大疆经纬M300 RTK多旋翼无人机,对某水库进行4种航高的航空摄影并获取了航摄影像,利用大疆智图软件对数据进行了处理,得到了DOM,DEM,DLG等4D数字产品。将实测数据与航测成果进行对比,并进行了精度评定和分析,阐述了不同航高对无人机摄影测量地形制图的精度影响。结果表明:所采用的4种航高飞行获取的数据能够满足植被较少区域大比例尺地形制图要求。研究成果可为无人机在地形图测绘及相关领域的应用提供参考。
关键词:航测地形图; 4D产品; 无人机;摄影测量; 大疆智图;大疆M300
中图法分类号:P231 文献标志码:A DOI:10.15974/j.cnki.slsdkb.2022.02.005
文章编号:1006 - 0081(2022)02 - 0028 - 04
0 引 言
无人机航空摄影测量技术凭借其机动性、灵活性和安全性、高分辨率、高精度、低成本、短周期、易操作和高效率等优势,在应急测绘和监测、智慧城市、工程建设、地理国情监测、城乡规划等行业得到了广泛应用[1-3]。大疆经纬M300 RTK多旋翼无人机是大疆创新公司2020年发布的一款具备六向定位避障与可视化飞行辅助界面的无人机,满足IP45防护等级,支持55 min超长续航和最远15 km图传距离,可同时支持3个有效负载。同时,其2.7 kg的载荷也可以搭载轻型的激光雷达。另外,其双控模式便于带状地形图测量时的控制交接,给作业管理和规划带来了便利[4]。Zenmuse-P1采用全画幅尺寸传感器的相机负载,可更换定焦镜头和三轴云台,实现更大的画幅和更精准的时间同步,画质与精度更高,有效像素4 500万。搭配經纬 M300 RTK 和大疆智图软件,带来高精度、高效率、一体化的航测解决方案[5]。本文利用M300 RTK作为搭载平台,搭载 Zenmuse-P1相机对某水库及周边范围进行外业航空摄影,采用大疆智图软件进行空三加密处理,得到研究区域的三维模型、DOM及点云等信息,将处理得到的内业成果与利用RTK实测的外业成果进行比对和精度评定分析,阐述了低空无人机不同航高对航测地形图精度的影响。
1 实际应用研究
1.1 研究区域
本次研究区域选择位于湖北省鄂州市境内的某水库及离库岸200 m范围内。该水库是一座以防洪为主,兼顾灌溉、养殖、休闲旅游的综合性水利枢纽。水库为中型水库,防洪标准按100 a一遇洪水设计,500 a一遇洪水校核。测区属于低山丘陵地貌,区域内最高点与最低点高差约125 m。东西长约1.2 km,南北宽约1 km。测区内分布有大坝、水库、公路、河流、农田、居民地、公共设施等。本次航摄选择在空域条件良好,晴朗、能见度好的条件下进行,采用大疆M300和Zenmuse-P1相机对该区域进行4个相对高度的航飞,航高分别为150,250,350,450 m。然后将通过内业软件处理后得到的成果与在现场实测的检查点进行比较和分析,得到在同区域、同设备、同飞行环境条件下,不同航高得到的结果对地形图成图精度的影响。
1.2 航测技术流程
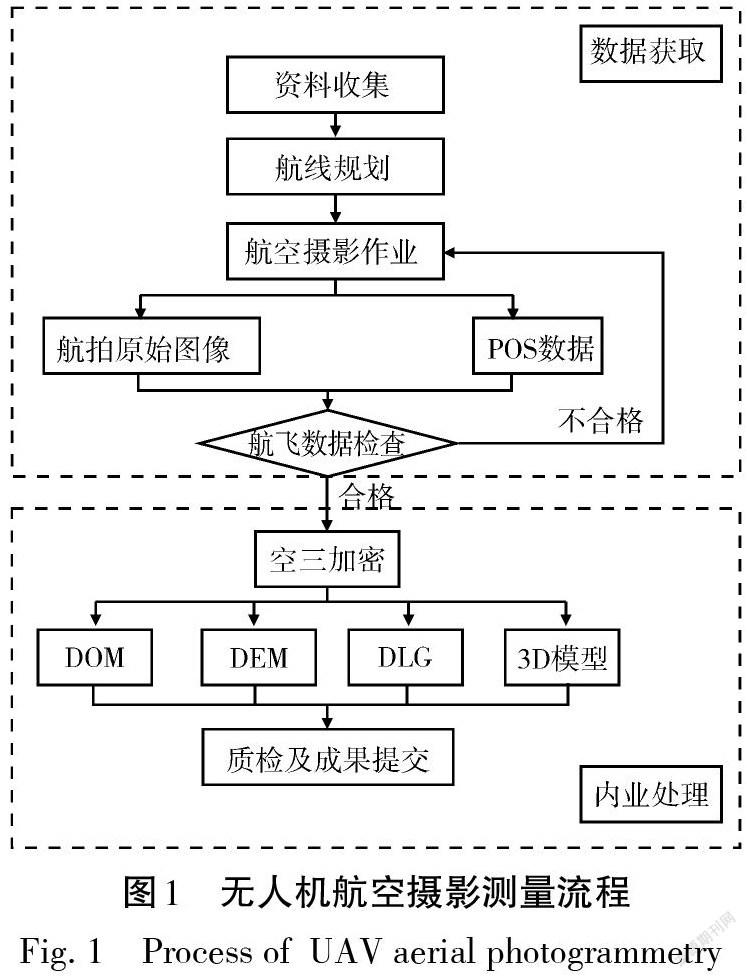
基于无人机的航空摄影测量技术流程如图1所示,主要包含数据获取和内业处理两个环节。数据获取包括资料收集及分析、航线规划、航空摄影作业、获取无人机航拍原始影像和POS数据及对数据进行质量检查。内业处理包括利用大疆智图软件进行空中三角测量、后得到研究区域的三维模型、DOM,DEM,DLG等数字产品。最后通过质量检查后提交成果。
1.3 飞行参数比对
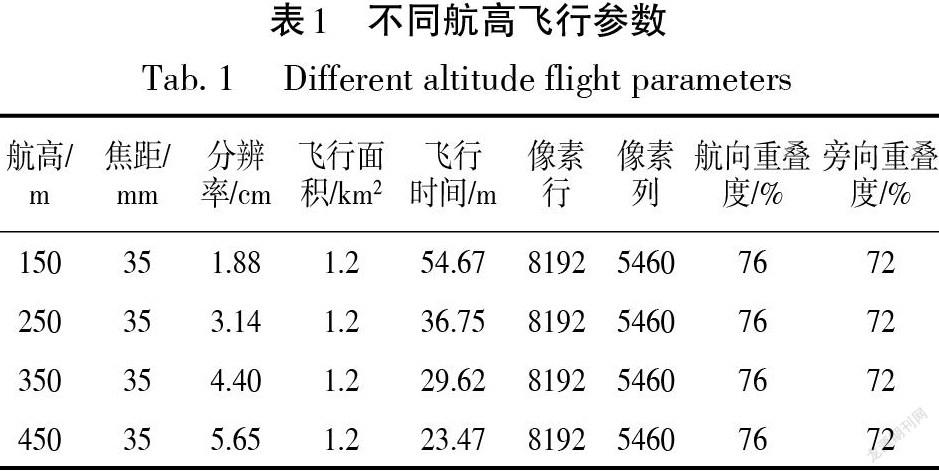
根据本研究实际情况,对研究区域布设航线,不同航高飞行参数如表1所示。
1.4 检查点布设及测量
为了精度评定及分析需要,在研究区域内布设85个点,如图2所示,检查点除水库水域范围外均匀分布在整个测区。检查点测量按照RTK图根点地形测量要求,检查点标志和做普通像控点标志一致,在地面利用羊毛刷和白色油漆涂刷以利于内业判读,一般做L型或十字型,能达到在无人机拍摄影像上清晰判读的要求。仪器经过控制点校正,经检查,平面和高程误差均在5 mm以内,校正完后对每个检查点用对中支架固定仪器,在RTK固定解模式下逐个进行测量后得到检查点坐标。本次研究采用CGCS2000坐标系,1985国家高程基准。
1.5 航空摄影作业及内业数据处理
在申请空域完成的前提下,航空摄影作业应尽量选择晴朗、能见度好的天气进行航摄。为了确保经纬M300 RTK安全和解算稳定,选择空旷位置起飞,同时起飞位置尽量选择通讯网络信号较好的地方,避免电磁干扰、遮挡干扰比较严重的区域。另外,确保遥控器与飞行器连接良好,否则会影响后期解算精度。完成拍摄后,人工检查影像成像质量,如亮度、清晰度、色调、纹理等,同时需要将获取的原始POS数据进行整理及处理,以备后续软件处理。
获取原始影像及POS数据后,将原始影像及POS导入大疆智图软件,设置好坐标系统和高程系统,然后导入POS数据后选择好输出的内容,包括三维模型格式、点云、输出坐标系统等信息,完成后提交进行空三处理和三维模型重建等工作。成果经过内业解译人员人工处理及采集可得到该区域的DOM,DEM,DLG等4D数字产品。
2 精度评定及分析
为了评定不同航高对地形图精度的影响,采用人机交互方式检查,在CASS10.1软件中利用CASS3D加载三维模型,分别在4个不同航高生成的三维模型上获取所有外业布设的检查点坐标和高程。然后与外业实测的85个检查点经过对比和分析,剔除以下3种由外界环境产生误差较大的点:① 由于树木、建筑物等遮挡导致成图模型中无法读取地面点坐标和高程;② 检查点标志被人为破坏,无法准确获取地面点位置;③ 由于天气原因下雨后导致库区水位上涨将布设检查点淹没。剔除后,将剩余的点随机选取38个点进行实测检查点和量测坐标比对,详细平面和高程的比对结果如表2所示。通过计算,航高为150 m的点位中误差为[σxy]=±0.031 m,高程中误差[σz=]±0.028 m;航高为250 m的点位中误差为[σxy]=±0.041 m,高程中误差[σz=]±0.032 m;航高为350 m的点位中误差为[σxy]=±0.055 m,高程中误差[σz=]±0.046 m;航高为450 m的点位中误差为[σxy]=±0.077 m,高程中误差[σz=]±0.059 m,以上数据表明本次实验4种不同航高航拍处理后所得到的精度完全能满足1∶1 000数字测图要求[6]。根据表2和所计算中误差可以得到以下结论:① 以经纬M300 RTK无人机和禅司P1相机为载荷拍摄的航高150,250,350和450 m所获取的数据得到的精度总体比较理想,平面和高程精度小有差异,可以满足大比例地形图测图要求。② 在成像条件相同、航高相对较低的条件下,得到的精度相对较高,而随着航高增加,所得到的成果精度呈逐渐下降趋势。
3 结 语
利用当前较先进的大疆经纬M300多旋翼无人机作为载体搭载禅司P1相机对某水库进行航空摄影测量,对该水库同一区域不同航高(分别为150,250,350,450 m)进行拍摄。将所获取的影像数据处理后的成果与实地RTK测绘的成果进行了对比分析。实验结果表明:① 4 500万高像素拍摄4种不同航高所得到成果精度都较高,能够满足植被较少区域大比例尺地形制图需求;② 在相同成像条件下,于航高相对较低处拍摄,得到的精度相对较高,而随着航高增加,所得到的成果精度呈逐渐下降趋势。
从该研究而言,基于无人机不同航高的航测结果具有科学性,可靠性,精度高等优势和特点。但是,本文以下问题值得商榷和探讨:① 本研究区域所得到的精度是在裸露地面的精度,而对于有植被和遮挡物位置的高程仍然无法准确获取,只能通过借助三维模型及人工经验来判读,若需一次性获取植被、遮挡物等的高程,需要更先进和更高配置的激光雷达来解决该瓶颈问题,这也是下一步需要解决的问题和方向。② 本次研究所获得的成果总体而言精度比较高,但是外业航空摄影和内业数据处理利用的均是大疆创新科技公司的硬件和軟件,未利用其他摄影测量软件,如ContextCapture,Pix4D,Inpho等对该次数据进行处理,具有一定的局限性。③ 由于M300无人机最高限高为500 m,倘若利用该无人机测1∶5 000或1∶10 000地形图时,虽然可满足精度要求,但是相对固定翼无人机而言,飞行效率还是比较低。小比例尺地形图低空数字航空摄影仍需要固定翼无人机来航测,在条件允许的情况下,利用免像控固定翼垂直起降无人机为最佳选择。
参考文献:
[1] 王洛飞. 无人机低空摄影测量在城市测绘保障中的应用前景[J]. 测绘与空间地理信息,2014(2):217-219,222.
[2] 朱正荣,李少龙. 无人机摄影测量用于大比例尺地形图测绘的实践[J]. 测绘标准化,2014(1):23-26.
[3] 谢运广. 无人机倾斜摄影测量在大比例尺地形图中的应用和精度分析[J]. 测绘与空间地理信息,2021(3):195-197,200.
[4] 经纬M300RTK技术参数[EB/OL]. https://www.dji.com/cn/matrice-300/specs.
[5] 禅司P1介绍[EB/OL]. https://www.dji.com/cn/zenmuse-p1/video.
[6] GB/T 14912-2005 1:500,1:1 000,1:2 000外业数字测图技术规程[S].
(编辑:唐湘茜)
猜你喜欢
北京测绘(2023年1期)2023-02-23 13:25:10
汽车观察(2022年12期)2023-01-17 02:19:38
建材发展导向(2022年12期)2022-08-19 02:32:00
计算机应用文摘·触控(2021年20期)2021-11-11 01:43:05
地理信息世界(2021年2期)2021-08-14 02:11:02
计算机应用文摘(2021年20期)2021-05-30 18:27:46
中国交通信息化(2019年3期)2019-06-18 11:07:36
航空知识(2019年1期)2019-01-11 01:34:48
环球飞行(2018年7期)2018-06-27 07:25:52
江西建材(2018年4期)2018-04-10 12:37:50
