提高竖井高程联系测量精度方法的研究与应用
2022-02-20 05:57李涛会
企业科技与发展 2022年10期
李涛会,张 洋,程 忠
(1.无锡城市职业技术学院,江苏 无锡 214153;2.江苏中设集团股份有限公司,江苏 无锡 214153;3.江苏省科佳工程设计有限公司,江苏 无锡 214002)
1 研究背景
1.1 高程联系测量的研究现状
近年来,随着测量机器人、三维激光扫描、静力水准等高新测绘设备的普及,新的竖井高程联系测量方法也逐步替代传统的钢挂尺水准测量方法。例如,刘少春分析了利用测绘机器人三角高程法代替水准测量进行高程传递,以及利用测绘机器人测导线和陀螺全站仪进行定向的精度[1];解决了黑暗环境下测量机器人自动搜索棱镜困难的问题。对于地铁竖井绝对高差比较大的场景,单纯利用测绘机器人对精度的提高并无实质性作用。王超介绍了将地面平面及高程控制网传递到地下隧洞的竖井联系测量的方法及数据处理等内容,并对小孔径竖井及较大高差的联系测量的相关问题进行了探讨[2];但是,其研究主要侧重于平面控制点的引测,而对高程联系测量依旧采用相对传统的钢挂尺法。张献伟等提出基于三角高程原理的长钢丝法导入高程[3],利用全站仪进行三角高程测量具有灵活、高效率的特点,已经成为高精度高程控制测量的一种有效手段。潘国荣等人分别使用静力水准和三维激光扫描进行高程变形测量研究[4],在小区域内精度可靠,能够满足变形监测要求,但受限于仪器测程或作业方式,暂时无法实现基于绝对高程数据的联系测量。
近年来,我国已开展了一系列高程联系测量的研究,但系统性的研究较少;目前,针对竖井联系测量,主要是针对矿山工程和地铁工程等方面的施工测量且部分研究条件具有很大的局限性,对应精度要求较高的地铁保护区监测场景的研究案例较少,缺乏针对性。
1.2 研究意义
本研究对常规竖井高程联系测量方法进行深入分析,在总结当前测量方法的优势和不足的基础上,通过对前述多种高程传递测量手段的分析,寻找影响竖井联系测量的因素,主要是外界环境影响和读数误差。为此,通过在地面架设全站仪将高程测量转化为高精度的边角测量,经精度分析和现场测试形成一种井下高程传递测量的新方法。提出了适用于提高地下工程竖井高程联系测量精度的改进方法,为开展类似项目提供了具可操作性的应用案例,具有良好的工程推广价值。
2 钢挂尺水准测量在竖井联系测量中的应用
鉴于本项目属于地铁竖井高程传递,竖井高差超过14 m,采用三角高程中间法和静态水准均不适合,故以传统悬挂钢尺法和新方法作对比分析。钢挂尺水准测量是目前在竖井联系测量中应用较多的一种方法,其测量原理简单且有技术规范支撑,现场施测方便。《城市轨道交通工程测量》(GB/T50308—2017)对使用钢挂尺进行竖井高程传递进行了规范要求,要求高差中的误差不超过5 mm。
2.1 钢挂尺水准测量的原理
钢挂尺水准测量主要是通过悬挂钢尺代替水准尺将地面高程引测至隧道内的一种方法。如图1所示,将钢尺悬挂在井边的木架上,下端挂10 kg的重锤,在地面上和隧道内各安置一台“天宝”DINI03电子水准仪,分别读取水准点1(点号 MYDM)和隧道内基准点2(点号Y6)的水准尺读数a和b,并读取钢尺读数P和Q,算得两点高差为h12=a-b-(P-Q),则可根据已知地面水准点1的高程 H1,按公式H2=H1+a-b-P+Q求得基准点2的高程H2。为了进行检核,至少独立观测3个测回,测回间应变动仪器高度,所得高差不得大于3 mm。观测过程中每次观测、计算后,马上换人进行复测。测量工作按照《城市轨道交通工程测量》(GB/T50308—2017)规范进行操作。

图1 钢挂尺水准测量示意图
2.2 钢挂尺水准测量的应用
本项目使用的钢挂尺是“田岛工具”HTN-30型钢尺,在20 ℃恒温室内经过鉴定后进行温度、张力及自身重力3项误差改正。
(1)温度误差计算方法:温度误差=实际测定值×尺带膨胀系数1.15×10-5×(实测温度-20 ℃)。
(2)张力误差计算方法:张力误差=(实际测定张力-标准张力)×实测距离÷(伸缩弹性力×尺带的截面面积)。
(3)重力误差计算方法:重力误差=(-){(尺带单位重量×实测尺长2)×实测距离}÷{24×实测时张力2}。
在Excel表格里面输入上述公式,并输入观测值,可得高差值与改正值。项目组分别在2019年12月2日(测量时环境温度为 6 ℃)和2019年12月5日(测量时环境温度为10 ℃)进行了10次钢挂尺水准测量,钢挂尺张力均为98 N,地面水准点1(点号MYDM)到隧道内基准点2(点号Y6)的高差取10次测量成果的算术平均值,即-14.224 78 m(测量数据见表1)。以二等水准测量成果高差-14.226 82 m为真值(见表2),计算钢挂尺测量中误差。经实测可知,钢挂尺测量过程中,受外界环境影响较大,其中温度改正达2.34 mm,张力改正达1.35 mm,在测量前要对钢挂尺进行检查,如钢尺长期使用后出现生锈或存在受力劳损等,均会导致改正不准确。因此,使用钢挂尺进行高程联系测量时,对仪器、环境、观测均有较高的要求。

表1 钢挂尺水准测量计算统计表
3 定滑轮法高程传递测量方法的原理
如图2所示,首先在地面井口位置架设滑轮6和固定支架61,在滑轮中间凹槽位置放入钢丝绳1(直径为1 mm,结构面为1 mm×7 mm的不锈钢绳),钢丝绳端头悬挂10 kg的重物8,并分别在钢丝绳上粘贴带有“十”字丝的全站仪反光贴2和水准仪沉降观测贴7。

图2 井下高程联系测量新方法示意图
在地面架设水准仪5,读取安置在已知地面高程点11(高程为H1)上的水准标尺3读数为a,此时水准仪的视线高程为H2=H1+a,通过收放钢丝绳,使沉降观测贴7位于水准仪视线范围内,固定钢丝绳,此时水准仪对沉降观测贴7的读数为B1。水准仪的视线长度应控制在30 m内,前后视距差控制在0.5 m内,水准仪i角控制在5″内。
在地面距离钢丝绳约30 m附近架设全站仪4,使仪器水平视线高度与钢丝绳位于同一水平面,读取全站仪到反光贴2“十”字中心的距离S1和水平角读数1。
在井下架设水准仪9,测量要求与井上相同,通过收放钢丝绳,使得沉降观测贴7位于水准仪9视线范围内时固定钢丝绳(沉降贴7运动距离为H),读取水准仪沉降观测贴7的读数为B2,此时水准仪9视线高程H3=H2-H-(B1-B2)=H1+a-H-(B1-B2),然后读取放置在井下高程点12(高程为H4)上的水准标尺10读数b,则H4=H3-b=H1+a-H-b-(B1-B2)。因为在同一钢丝绳上,所以沉降贴7运动的距离H与反光帖2运动的距离D相等,则H4=H1+a-D-b-(B1-B2)。
当收放钢丝绳使沉降观测贴7位于水准仪9视线范围内的同时,反光贴2由A1位置运动到A2位置(运动距离为D),保持地面上全站仪4竖直角固定以确保A1到A2的矢量方向不变,水平转动全站仪4瞄准A2位置反光贴2的“十”字中心,读取全站仪到反射贴2的距离s2和水平角读数2,据余弦公式得到 D=[s1+s2-2×s1×s2×cos(2-1)]1/2。则井下高程点12的高程H4=H1+a-[s1+s2-2×s1×s2×cos(2-1)]1/2-b,通过以上测量和计算,可实现井下高程联系测量的高精度化。
地面高程点与井下高程点的高差:

其中:

由此可知高差h14中的误差:

对公式(2)两边求导可得:

其中:

由误差传播定律可得:

本项目采用带有自动照准功能的“徕卡”TM50测量机器人,其测角精度为0.5″,测距精度为0.6 mm+1 ppm,则两个测回的角度中误差m=0.5″,经计算,在竖井高差不变的情况下(假定为15 m),ms随全站仪视距的增加而减小。
假定距离 S1≈S2≈15 m,则测距中误差ms1≈ms2=0.601 mm,=60°,代入公式(3)至公式(6)中可得ms=0.43 mm,在不考虑水准仪照准误差时,即认为ma和mb均为0,mh14=ms=0.43 mm,优于规范0.5 mm的要求。
假定距离S1≈S2≈30 m,则测距中误差ms1≈ms2=0.603 mm,=29°,代入公式(3)至公式(6)中可得ms=0.22 mm,在不考虑水准仪照准误差时,即认为ma和mb均为0,mh14=ms=0.22 mm,精度是规范要求0.5 mm的两倍多。
现场使用“徕卡”TM50全站仪及“天宝”DINI03水准仪按前述步骤进行测量,分别获得了地面水准标尺3读数a=0.573 29 m;全站仪到反光贴2的距离S1=19.911 m和水平角读数1=10°10′02″;全站仪到反光贴2的距离S2=18.608 2 m和水平角读数2=50°46′37″;水准标尺10读数b=1.326 11 m。其中,角度观测采用分组测回法,每组分别观测4个测回,距离观测采用往测4个测回。将上述测量数据代入公式(1)中,经计算可得地面高程基准点MYDM到隧道内高程基准点Y6的高差值为-14.227 55 m。
4 精度对比分析
为了准确获得地面高程基准点MYDM到隧道内高程基准点Y6的高差数值,使用“天宝”DINI03电子水准仪,通过传统二等水准测量往返观测的方式,将地面高程点MYDM经过连接通道引测到隧道内高程点Y6,经计算MYDM到Y6的高差为-14.226 82 m(见表2)。
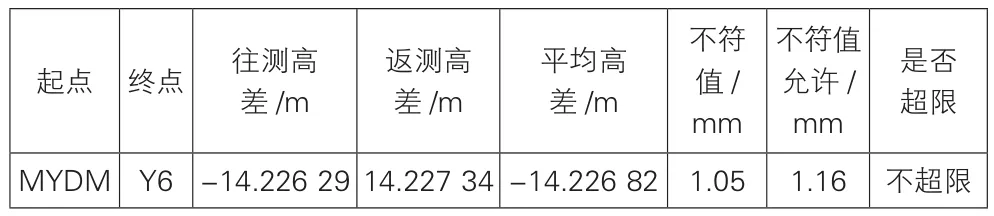
表2 二等水准线路计算统计表
如表3所示,将钢挂尺测量和新方法与二等水准测量成果进行差值比较发现,新方法与水准测量成果更为接近,一般可认为水准测量成果为真值,其测量中误差为m0=0.5 mm,取2倍水准测量中误差作为限差,则限差为2m0=1 mm,那么定滑轮新方法和二等水准测量成果差值0.73 mm<1 mm,可见定滑轮实测精度能够满足要求。

表3 各方法高差成果统计表
5 总结与展望
钢挂尺水准测量在竖井联系测量中应用较为广泛,但其受钢挂尺自身改正影响较大,并且高差越大,精度越低,适用于一般性低精度工程测量项目;中间法三角高程对垂直角要求较高,在竖井联系测量中无法得到很好的应用,但其在高差变化不大的隧道环境中,能够达到二等水准的观测精度要求,可应用于隧道竖向位移变形测量;静力水准仪受仪器自身量程限制,项目组未能将其直接应用到竖井联系测量中,但其在地铁保护区竖向位移监测中,应用较为广泛,并可实现自动化监测;而本项目提出的井下高程联系测量的新方法是利用定滑轮的物理特性,将高差测量转化为距离测量,通过高精度全站仪测角测边以提升观测精度,该方法受环境影响小,可操作性强,具有很好的工程应用价值。
目前,随着测量新技术、新设备的更新换代,基于三维激光扫描、近景摄影测量等新方法应用到竖井联系测量将成为可能,将继续保持求真务实、服务工程的初心,做好科研成果的应用与改进工作。
猜你喜欢
煤气与热力(2021年10期)2021-12-02
仪器仪表用户(2020年11期)2020-11-12
装饰装修天地(2020年11期)2020-07-04
科学咨询(2020年43期)2020-03-04
上海计量测试(2019年5期)2019-11-04
新商务周刊(2018年7期)2018-12-08
铁道勘察(2018年5期)2018-10-22
中国教育技术装备(2016年22期)2017-03-02
科技视界(2016年10期)2016-04-26
房地产导刊(2015年6期)2015-10-21