双离合自动变速器车辆起步品质模糊综合评价模型及其敏感度分析
2022-02-20 13:50刘海江
汽车工程学报 2022年1期
刘海江,邢 证
(同济大学机械与能源工程学院,上海201804)
目前,针对DCT 车辆起步品质的评价,各大主机厂仍然采用主观评价的方式,即通过具有熟练驾驶技能和掌握过硬汽车动力学知识的人员对目标样车进行试驾打分。但主观评价具有评价结果主观性强、难以精确量化等缺陷,因而逐渐出现了基于车辆试验数据的客观评价方法。
当前已有较多国内外研究者对基于试验数据的DCT车辆起步品质客观评价方法进行研究。宋世欣等建立了以加速度峰值、正向最大冲击度等指标的起步品质评价指标体系,并通过层次分析法确定了各个指标的权重。张建国建立了以起步加速度峰值、起步正向最大冲击度等8 个客观试验参数的起步品质评价指标体系,然后采用线性加权模型计算起步品质的客观评分。黄伟等以冲击度、加速时间等6 项客观试验参数作为输入,基于模糊神经网络建立了车辆起步主、客观评分之间的联系并取得了比较理想的结果,但神经网络的训练需要大量数据作为前提,而且评价过程可解释性差。王继明、WU Mingxiang等和LU Xiaohui等都以冲击度和滑摩功作为起步控制品质评价的指标,并以此为参考构建了DCT 车辆起步控制策略。同时,部分国外汽车企业和组织也在车辆客观评价方面获得了一定的研究成果并成功使其商业化。例如,AVL 公司的评价系统AVL-DEIVE 通过采集不同工况下二百多个整车及发动机参数指标,经过神经网络的运算获得该工况下汽车平顺性、燃油经济性等评价分数,但软件本身价格昂贵且学习时间成本颇高。
以上文献对车辆起步品质评价的研究都着重于研究评价方法,力求提升指标的全面性和评价结果的客观性、准确性。而对于一个评价系统,研究者不仅要知道最终的评价结果,也要了解评价结果的可靠程度。这是因为,一方面客观评价方法中的指标值获取是建立在试验数据基础上的,在指标值的获取过程中,数据难免会受到试验操作人员、试验环境、仪器、算法等因素的影响而具有不确定性。另一方面,评价模型中的部分参数来自于操作人员的主观判断,如指标主观权重等。这样操作人员认知的模糊性甚至认知偏差又会对最终评价结果带来影响。因此,一个完善的评价系统不但应该包括合适的评价模型,也应该评估在这种不确定情况下评价结果的可靠性。敏感度分析就是一种处理不确定性因素的方法,该方法通过改变指标值或者模型参数来检验评价结果的稳定性,并通过稳定性的大小来反映在不确定环境下评价结论的可靠程度。通过敏感度分析,研究者不仅可以合理选择模型参数以提高评价结果的稳定性,还可以识别敏感要素以便在研究中谨慎对待。
针对以上问题,本文所做的研究主要考虑到品质具有模糊性的特点,提出了基于模糊综合评价模型的DCT 车辆起步品质评价方法。在模糊综合评价模型中分别使用两种不同的隶属度函数,分析其对评价结果的影响;在模糊综合评价的基础上,利用扰动法对模糊综合评价模型进行指标敏感度分析。利用敏感度分析的结果,确定了使用不同类型隶属度函数对DCT 车辆起步品质模糊综合评价结果稳定性的影响。
1 车辆起步品质评价指标的选取
车辆起步品质是指在保证汽车动力性和动力传动系统寿命的前提下,做到起步过程的平稳与迅速。在起步过程中,离合器结合速度过快或者过慢都会对起步品质造成较大的影响。离合器结合速度过慢会造成起步延迟,以至于不能满足迅速起步的品质要求。同时,结合速度过慢也会延长滑摩时间,缩短离合器的使用寿命。而离合器结合速度过快则会造成发动机转速产生较大的波动,致使起步过程中出现冲击和喘振。参考整车厂商知识和相关文献确定了DCT车辆起步评价指标,见表1。

表1 DCT车辆起步品质评价指标
2 DCT车辆起步品质模糊综合评价模型
2.1 确定起步品质评价指标集和评语集
表1确定了以发动机转速波动Δ、起步响应延迟时间、起步加速时间、起步加速度峰值、冲击度作为DCT 车辆起步品质评价指标,令指标集={Δ,,,,}。同时,对起步品质划分为最差、差、中、良、优秀5 个等级,分别以,,,,表示。为了便于量化计算,将各个等级赋值= 3、= 4.5、= 6、= 7.5、= 9,评语集={3,4.5,6,7.5,9}。
2.2 确定起步品质评价指标客观权重
客观权重法通过衡量数据本身包含的信息来确定其权重。借助信息熵的概念,熵权法根据数据的离散程度来衡量其包含信息量的大小:数据离散程度越大信息量越大,熵权也越大。本研究使用熵权法对起步品质评价指标进行赋权。熵权的计算方法如下:
首先构造评价矩阵。假设有个起步过程,根据前文,每个起步过程具有5 个评价指标,初始评价矩阵为:

式中:x为个起步过程中每个指标的指标值。
考虑到不同指标的量纲可能并不相同,所以还需要对指标值进行标准化处理,转换方法为:

式中:p为第个起步过程中第个指标的指标值占个起步过程该指标值之和的比例,并由此得到评价矩阵。

计算第个指标的熵值e

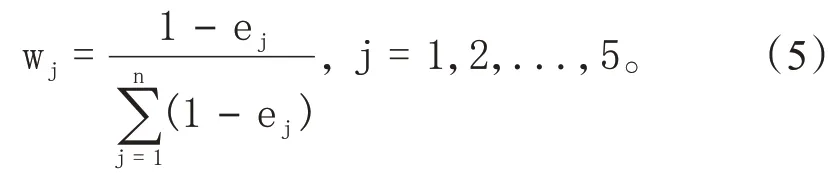
计算第个指标的权重w
得到权重集

2.3 划分起步品质评价指标等级区间
借鉴某整车厂现有知识体系,对称等距地将指标值划分为最差、差、中、良、优秀5 个等级,每个指标在不同等级的取值范围见表2,并按照指标值与评价等级之间的关系,将指标分为成本型指标和经济型指标。其中,经济型指标是那些指标值越大评价等级越好的指标,成本型指标则正好相反。由表1 可知,除了起步加速度峰值为经济型指标,其余均为成本型指标。同时,为了便于下文中隶属度函数的构造,现将第个指标从最差到优秀各个相邻等级的4个临界值设为l,= 1,2,3,4。
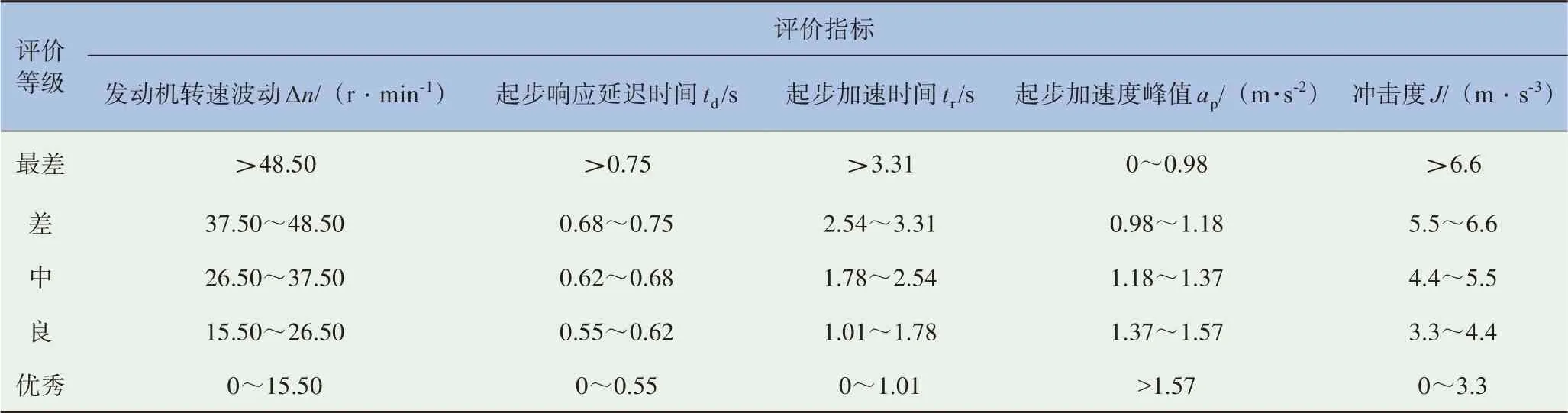
表2 起步品质评价指标等级划分
2.4 构造起步品质模糊评价矩阵
使用模糊综合评价关键的一步在于将评价对象映射到评价等级上,这种映射关系就表现为模糊评价矩阵,本研究采用构造隶属度函数的方法确定模糊评价矩阵。隶属度函数的确定具有一定的主观性,在车辆起步、换挡品质模糊综合评价中常用的隶属度函数类型有梯形、三角形和正态分布。由于正态或者梯形分布隶属度函数相较于三角形分布,能够在收集更多隶属度高、有价值的评价信息的同时过滤掉隶属度和评价价值较低的信息,提升评价结果的可信程度。因此,假设品质在不同评价主体的认知上具有正态分布或者梯形分布的特点,采用这两种分布隶属函数来确定模糊评价矩阵,并在结论中比较两者对评价结果的影响。
在确定各隶属度函数参数的过程中,需要遵守最模糊和最清晰的原则:即区间端点为最模糊的点,此时相邻两个评价等级的隶属度相等;区间中点是其等级最清晰的点,此时当前区间对应评价等级的隶属度值为1。同时,各个评价等级的隶属度函数还应首尾相接,以满足隶属度归一化的要求,即当前评价等级隶属度刚好为1 时的点也是相邻评价等级隶属度刚好为0的点。
2.4.1 正态分布隶属度函数
设个起步过程中,第个起步过程表示为X=[x,x,...,x],其 中x,x,...,x为 该 起 步过程5 个评价指标的指标值。令r(v)为第个起步过程中第个指标值x对于评价等级v的隶属度。对于经济型指标,每一评价等级的正态分布隶属度函数如下:
最差(,= 1):

式中:σ=(μ- μ)/3。
中间级(v,= 2,3,4):

式中:σ=(μ- μ)/6。
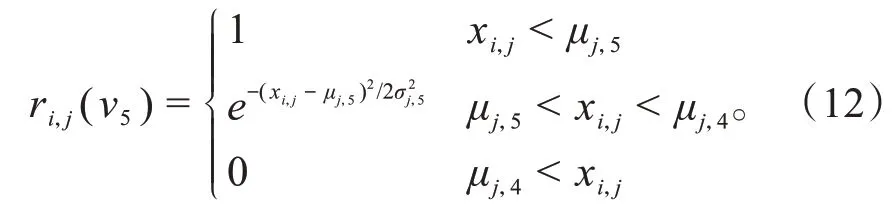
优秀(,= 5):
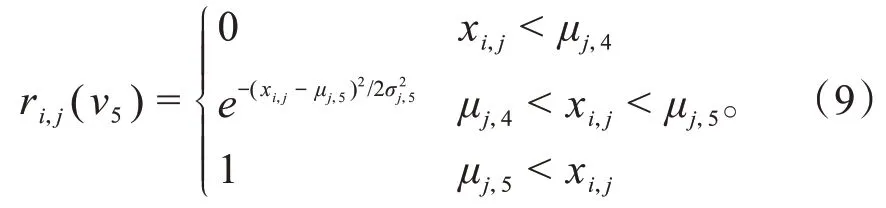
式中:σ=(μ- μ)/3。
以上各隶属度函数中,μ为第个指标对评语v的正态分布隶属度函数的分布期望值。由正态分布的性质并按最清晰原则,μ应与各指标下各等级区间中点对应。σ为正态分布隶属度函数的分布标准差,由隶属度归一化要求并按6原则令σ=(μ- μ)/6。以第4 个指标起步加速度峰值为例,最终确定的经济型指标对每一评价等级的正态分布隶属度函数图像如图1所示。
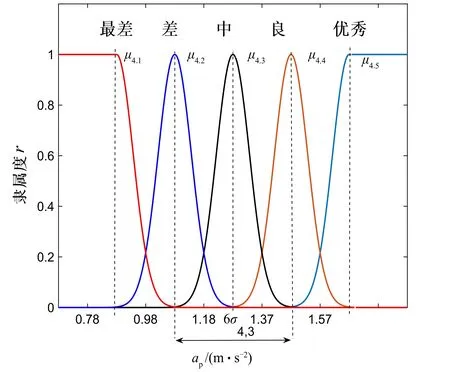
图1 起步加速度峰值对各评价等级的正态分布隶属度函数
对于成本型指标,不同指标对应每一评价等级的隶属度函数表达式和参数不变,只改变定义域中大小关系符号。
最差(,= 1):

式中:σ=(μ- μ)/3。
中间级(v,= 2,3,4):

式中:σ=(μ- μ)/6。
优秀(,= 5):
式中:σ=(μ- μ)/3。
综合经济型和成本型指标的隶属度值,并将各个指标5 个评价等级隶属度归一化后,可得正态分布隶属度函数下第个起步过程模糊综合评价矩阵R,如式(13)所示。
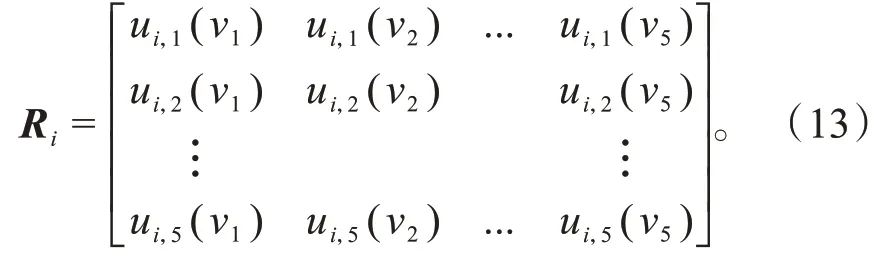
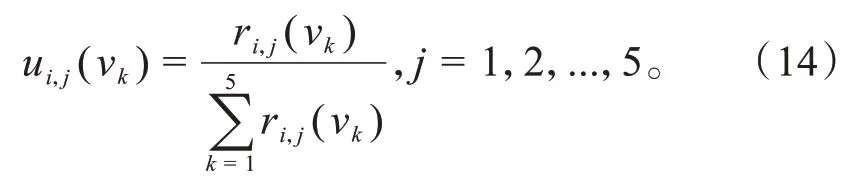
式中:u(v)第个起步过程中第个指标值x对于评价等级v经过归一化之后的隶属度值,其计算方法为:
2.4.2 梯形分布隶属度函数
类似地,对于经济型指标,每一评价等级的梯形分布隶属度函数如下:
最差(,= 1):
中间级(v,= 2,3,4):
优秀(,= 5):
式中:a,b,c,d为第个指标对于评价等级v的梯形分布隶属度函数的参数,依次表示为梯形的4 个顶点。为了满足隶属度归一化要求令c=a,d= b。同时保证两个相邻评价等级隶属度函数有一定的重叠,对于第个指标现引入模糊区间θ,为了保证最模糊原则,令:
式中:l为第个指标的第个临界值。本研究采用等模糊区间,即同一指标下任意两个相邻评价等级隶属度函数的模糊区间是等长的。以第4 个指标起步加速度峰值为例,最终确定的经济型指标对每一评价等级的梯形分布隶属度函数图像如图2所示。
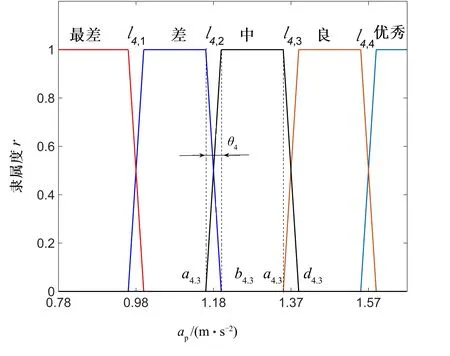
图2 起步加速度峰值对各评价等级的梯形分布隶属度函数
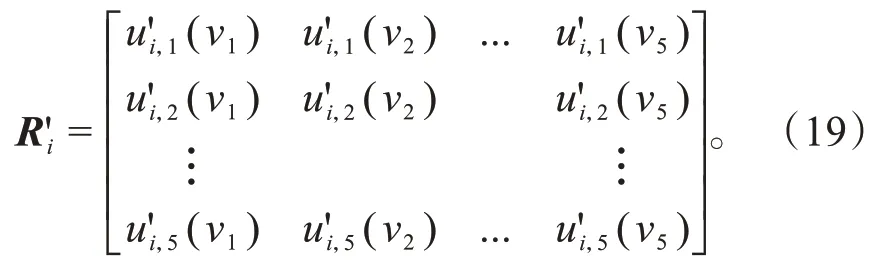
对于成本型指标,其建立方法与建立成本型正态分布隶属度函数类似。综合经济型和成本型指标的隶属度值并经过隶属度归一化,可得梯形隶属度函数下第个起步过程模糊综合评价矩阵',如式(19)所示。
2.5 计算模糊综合评价向量
设B为第个起步过程模糊综合评价向量,如式(20)所示。

式中:为权重向量;R为第个起步过程模糊综合评价矩阵;◦为模糊算子。常见模糊算子有(∧,∨),(·,∨),(∧,+ ),(·,+ )4 种。由于采用加权平均型模糊算子(·,+ )的模糊合成结果与指标权重、各个评语等级隶属度全部相关,所以本文选用该模糊算子,此时

2.6 计算评价结果
模糊综合评价向量B中每一个分量反映了第个起步过程属于相应评价等级的隶属程度。虽然该向量在一定程度上反映了该起步过程的品质,但向量之间不便于对比和排序,所以需将评价结果从评价向量转化为数值。将隶属度看作是相应评价等级的权重,对赋值之后的评语等级进行加权平均便可将评价向量转化为评价数值。令第个起步过程的评分为a,如式(22)所示。

式中:为经过赋值之后的评语集;B为第个起步过程模糊综合评价向量。
3 起步品质评价指标敏感度分析
敏感度分析主要采用扰动法,即让评价模型中的指标值或者模型参数做微小扰动后,计算评价结果相应变化量。如果扰动导致评价的变化量大,则称该评价方法的稳定性差,相应的,由该模型得到的评价结果在不确定的环境下就显得不那么可靠。本文只研究DCT 车辆起步品质模糊综合评价下的指标敏感度。
将个起步过程中的第个起步过程表示为X=[x,x,...,x],其评分为a。当给第个指标的 指 标 值x一 个 扰 动 量Δx,使 其 变 化 为'=x+ Δx时,该起步过程评分从a变化为'= a+Δa,则第个起步过程的评价结果对第个指标的敏感度S 定义为:

由式(23)可知,指标敏感度的物理意义为指标值的单位相对变化量所引起的评价结果的相对变化量。S 越大表明第个起步过程中,第指标敏感度越高,该起步过程的评价结果越容易受到该指标值扰动的影响。同时,考虑一共有个起步过程,令这个起步过程对第个指标敏感度的最大值为第个指标的敏感度。设S为第个指标的敏感度,如式(24)所示。

式中:S反映了在对第个指标施加一个扰动时,该扰动对个评价结果可能产生的最大影响程度。同时,通过对这个指标敏感度求和来对评价结果的稳定性进行度量,如式(25)所示。

式中:为评价指标的数量。
4 试验验证
4.1 试验设计
试验车辆选用某一款国内品牌DCT 车辆。数据采集系统以NI公司的cDAQ9132为核心,外接力传感器、SpeedBox mini 传感器等。试验选用专业驾驶员,对置于状况良好且平直路面上的试验车辆以10%、20%、30%、40%、50%、75%、100%的油门踏板开度进行1 挡起步操作。起步过程中,cDAQ9132 中CAN 信号采集卡实时采集CAN 总线上如发动机转速、离合器C1 及C2 转速等信息,同时接收SpeedBox mini 等外接传感器测得的车辆加速度、速度等数据,最终由cDAQ9132 实现多通道数据的同步,同步后的数据通过数据线传输至上位机,记录并保存。
4.2 评价结果
首先对获取的行驶工况片段进行提取,接着对整车及外接传感器信号异常值和缺失值进行识别和处理,最后经过小波降噪后提取起步过程评价指标值。以10%油门开度起步过程Q1 为例,指标值见表3。
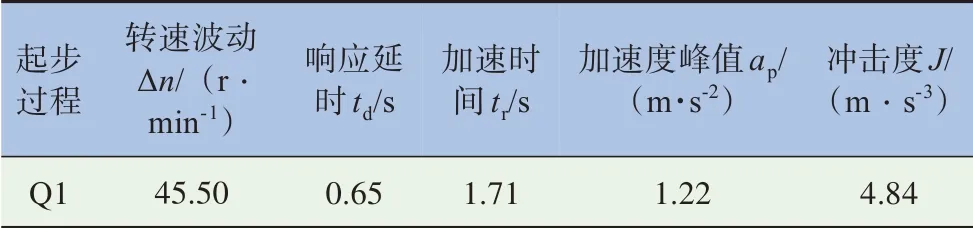
表3 起步过程Q1评价指标值

根据熵权法求得指标权重向量为:

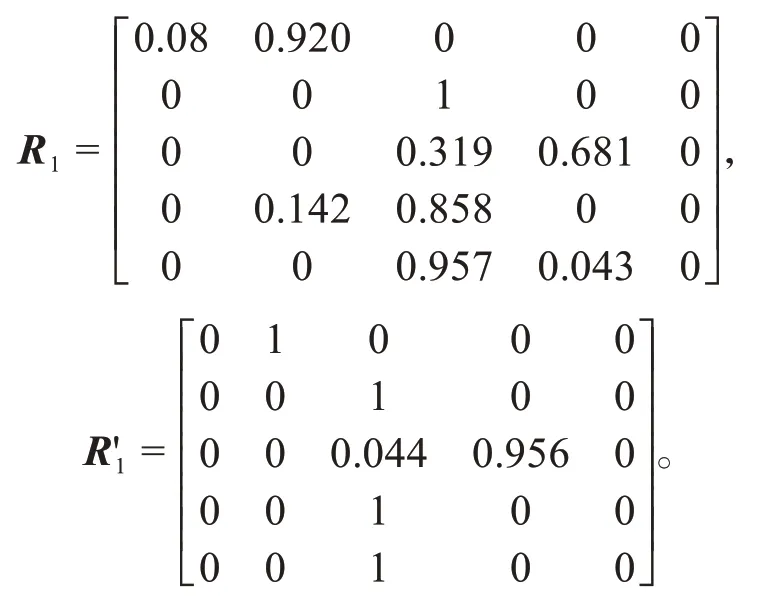
将权重向量与模糊综合评价矩阵做模糊运算,求得起步过程Q1 在正态分布和梯形分布隶属度函数下模糊综合评价向量与'为:

最终利用式(22)反模糊化求得起步过程Q1在正态分布和梯形分布隶属度函数下的模糊综合评分为6.41 和6.68。可以看出,起步过程Q1 在两种隶属度函数下的模糊综合评价矩阵、'和模糊综合向量、'并不相同,但其综合评分只有0.27分的差距。同理,求得其他起步过程的综合评分,最终评价结果见表4。

表4 起步品质评价结果统计
由表4 可知,基于这两种隶属度函数的模糊综合 评 价 结 果={,,...,} 和={,,...,}比较相近。根据式(26)通过计算这两组得分的Pearson 系数ρ来进一步量化这两组评分的相近程度,Pearson系数越接近1说明这两组评分相关性越强。

经计算,这两组得分ρ= 0.95,综合Pearson系数和评分差值,说明基于这两种隶属度函数的模糊综合评价结果有很强的一致性。这一分析过程指出,在DCT 车辆起步品质的模糊综合评价中,虽然正态分布和梯形分布隶属函数对论域中元素模糊程度的描述上有着一定不同,但这种差异性对评价结果的影响却十分有限。
4.3 指标敏感度分析结果
为了分析指标敏感度,在保持其他指标值不变的情况下,给予这8 个起步过程中每个指标值±5%的扰动量,计算指标变化后的起步过程评分值的变化量。按照式(23)和式(24)计算各个指标的敏感度S,结果见表5。
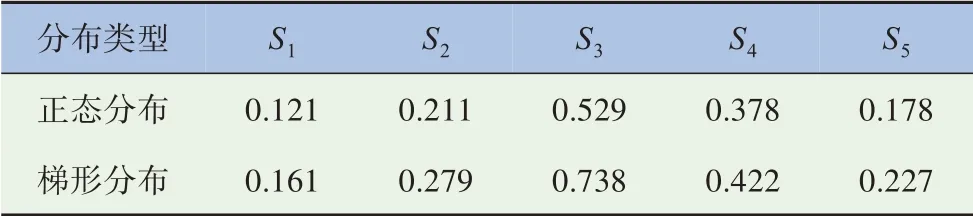
表5 指标敏感度分析结果统计
由式(25)求指标敏感度之和:

从指标的角度来看表5 的结果,起步加速时间、起步加速度峰值这两个指标的敏感度、最大。从隶属度函数的角度来看,基于正态分布隶属度函数的模糊综合评价模型指标敏感度之和要比基于梯形分布的小22.4%。对比正态分布隶属度函数和梯形分布隶属度函数下各个指标敏感度结果,均显示出基于正态分布隶属度函数的指标敏感度较低。
由表6 中的加速度峰值在7 个起步样本的指标值和敏感度值可知,敏感度越大的指标值越接近表2中的模糊集合临界点。具体对比梯形分布和正态分布隶属度函数的形态,梯形分布下两相邻等级的隶属度函数重叠范围小,指标值的微小变化会造成隶属度值的较大改变,从而造成评价结果的较大范围变化,因此敏感度高。
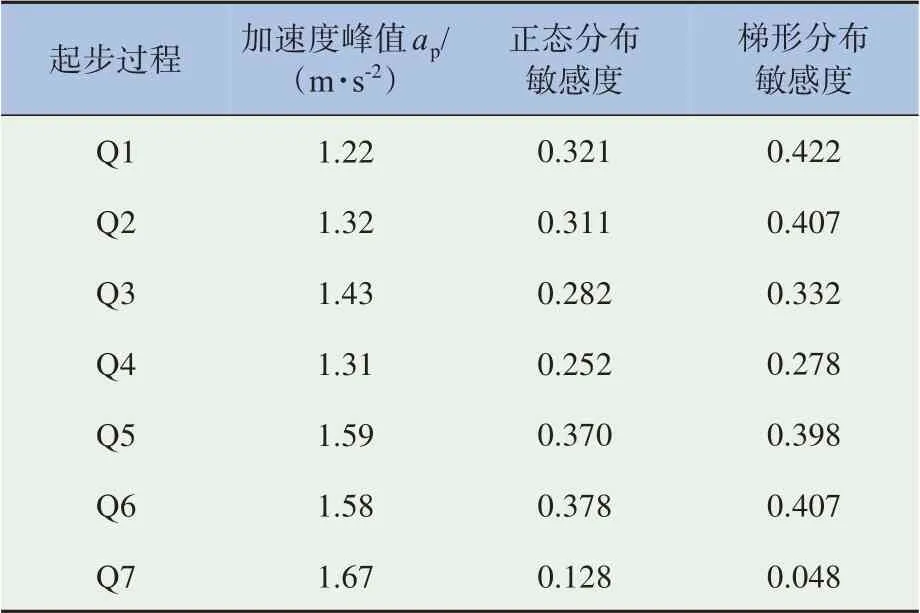
表6 指标敏感度分析结果统计
以上分析说明起步加速时间、起步加速度峰值是敏感度最大的两个指标,而且综合对比指标权重发现指标按照权重排序和按照敏感度排序的结果是相同的。同时,虽然评价结果显示基于正态分布、梯形分布隶属度函数的起步品质模糊综合评价结果有较强的一致性,但通过计算结合分析说明,从保持评价结果稳定性方面使用正态分布隶属度函数更加合理。
5 结论
(1)通过熵权法和正态分布、梯形分布两种隶属度函数,分别构造了与之对应的DCT 车辆起步品质模糊综合评价模型。通过对比起步品质评价结果,得出的结论是无论选择正态分布还是梯形分布隶属度函数,起步品质得分基本一致。
(2)提出了基于扰动法的指标敏感度分析方法,以衡量评价结果的稳定性。指标敏感度分析显示,起步加速时间和起步加速度峰值是敏感度最大的两个指标,而且权重越大的指标其敏感度也越大。同时,对比不同隶属度函数下的模糊综合评价模型指标灵敏度的分析结果,得出了基于正态分布隶属度函数的模糊综合评价模型指标敏感度低,有利于保证DCT 车辆起步品质评价结果稳定性的结论。本文提出的敏感度分析方法也可以应用于其他模糊综合评价中,用来衡量模型参数的合理性,以提高评价结果的稳定性。
猜你喜欢
科技资讯(2020年14期)2020-06-27
新西部下半月(2017年6期)2017-07-19
新课程·中旬(2017年2期)2017-03-29
中外医疗(2017年1期)2017-03-20
中学生数理化·八年级数学人教版(2016年4期)2016-08-23
理科考试研究·高中(2016年9期)2016-05-14
新高考·高二数学(2015年7期)2015-10-22
数学教学通讯·初中版(2014年2期)2014-03-21
中学生数理化·高考版(2008年2期)2008-11-01