基于线特征跟踪的铁路桥梁支座振动位移测量方法
2022-02-19 02:50闫朝勃赵维刚王保宪李义强
铁路计算机应用 2022年1期
闫朝勃,赵维刚,王保宪,李义强
(1.石家庄铁道大学 机械工程学院,石家庄 050043;2.石家庄铁道大学 安全工程与应急管理学院,石家庄 050043)
桥梁支座是连接桥梁上部和下部结构的重要结构部件,为评估桥梁支座的性能,往往需要对其位移进行监测。目前,在工程中常用接触式位移计对支座位移进行监测。这种监测方式简单、直接,但在长期服役过程中,由于关键测量部件不断发生往复运动,易使传感器磨损。近年来,基于机器视觉的图像处理技术广泛应用于结构位移监测领域,并得到了国内外研究人员的广泛关注。杜鹏等人[1]提出一种无需在结构上布置靶点,即可从结构振动视频中获取结构表面密集特征点位移响应的灰度值匹配算法,该算法的测量结果与传统位移传感器实测结果误差在5%以内,但该方法受环境噪声的影响较为严重;崇爱新等人[2]提出了一种基于双目视觉技术的无缝线路钢轨纵向位移测量方法,该方法重点解决了复杂现场采集环境中编码特征点的精确检测与匹配问题,但是现场实验中钢轨纵向位移的测量精度仅为0.2 mm;除此以外,相关学者还提出了许多基于机器视觉的监测结构物位移的新方法[3-6]。由于桥梁支座位于梁体下方,周围空间狭小、背景环境复杂、光线较弱,上述先进的测量方法可以精准地对桥梁挠度、钢轨纵向位移等进行监测,但是无法直接应用到桥梁支座的位移监测中。为此,本文提出了一种基于线特征跟踪的铁路桥梁支座振动位移测量方法。
1 铁路桥梁支座振动位移测量概述
1.1 测量原理
本文利用目标跟踪技术,通过跟踪固定于支座上方桥体的靶标,获取靶标的位移变化,从而计算出铁路桥梁支座的振动位移。该原理主要包含3 部分,感兴趣目标的自动获取、直线鲁棒检测算子、多帧数据融合滤波,如图1 所示。
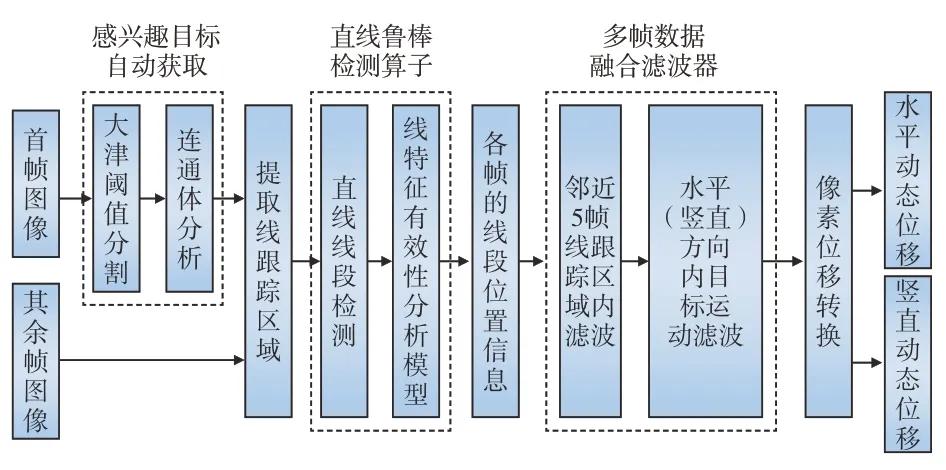
图1 测量原理示意
(1)利用大津阈值分割法和连通体分析法构建感兴趣目标自动获取方法,自动获取视频首帧图像中红色方形靶标的坐标信息,并结合靶标坐标信息确定线跟踪区域。
(2)利用直线鲁棒检测算子对各个线跟踪区域中的线段进行检测,并获取各帧图像中线段的位置信息。
(3)为消除光照、背景杂波及运动模糊对位移结果的影响,设计了一种多帧数据融合滤波器对振动位移数据进行后处理,并结合靶标实际长度和像素长度的比值,计算出支座振动位移。
1.2 布设方式
本文以双T 简支梁桥为例建立了桥梁支座位移测量体系。将由红色和黑色磨砂有机玻璃制作的靶标测量标识固定在支座上方的桥体上,如图2(a)所示。为获取靶标的振动视频数据,需要在靶标前方的桥墩上固定一台摄像机,为保证摄像机拍摄到的靶标图像尽量在整个图像的中心,需要摄像机镜头面与方靶标面尽量平行,同时保证镜头中心轴线与靶标中心轴线尽量共线,如图2(b)所示。当有列车荷载作用在桥梁梁体时,该靶标会产生振动,通过对靶标的振动视频进行处理,可得到桥体在靶标平面内的位移。考虑到桥梁支座与其上方的桥体直接物理连接,因此,支座上方桥体的位移变化即是该桥梁支座的位移变化。

图2 位移测量布设示意
2 感兴趣目标自动获取
图2 靶标中红色的方形区域是需要自动获取的感兴趣目标。本文利用大津阈值分割法和连通体分析法构建感兴趣目标自动获取方法,提取视频首帧图像的红通道图像,对其进行二值化、形态学操作等预处理,利用连通体分析法并结合已知的靶标相关信息自动获取靶标的坐标信息,根据靶标的坐标信息,自动确定方形靶标4 个边缘的线跟踪区域。
2.1 图像预处理
在对感兴趣目标进行定位之前,先要对图像进行预处理。由于红色的感兴趣目标在红通道图像中的成像效果最为明显,所以将视频片段首帧图像的红通道图像作为后续算法的输入图像;再利用大津阈值分割法对图像进行二值化处理,初步实现感兴趣目标的分割;利用连通体分析搜索图中所有的连通体,并通过设置一个合适的尺寸因子对所有连通体进行形态学开运算,消除面积较小的连通体。
2.2 感兴趣目标定位
经过形态学开运算操作后,仍存在着一些无关的连通体区域,因此,为精准地对感兴趣目标进行定位,需要充分利用感兴趣目标的已知信息对无关的连通体区域进行过滤。已知感兴趣目标的相关信息包括:
(1)感兴趣目标为正方形,因此图像中感兴趣目标的长宽比值接近1。
(2)为保证位移监测精度,相机在安装过程中会进行观察和测量,确保感兴趣目标的边长在1 000像素以上。利用上述信息对连通体区域进行筛选,可自动获取感兴趣目标的坐标信息。如图3 所示,粗实线框中的区域即为获取到的感兴趣目标区域,4个阴影区域是4 个线跟踪区域,从图3 可以看出,各个线跟踪区域中仅包含一条感兴趣目标区域的边缘信息。

图3 感兴趣目标区域和线跟踪区域示意
感兴趣目标左上角的坐标为(x0,y0),沿x轴方向的边长为w像素,沿y轴方向的边长为h像素,本文用s表示两个边长的平均长度。

为简化标定过程,利用已知边长的靶标进行标定,只需标定出相机的物面分辨率而不需对相机内外参数进行标定,同时保证了标定精度和稳定性。已知红色方形靶标的实际边长为lmm,通过公式(2)求解出实际边长与像素边长的比例因子S f(单位:mm/px)。

为准确且快速地跟踪感兴趣目标的坐标变化,本文在感兴趣目标定位的基础上,确定了4 个线跟踪区域,其中线跟踪区域1 和2 用于监测支座水平方向的位移,线跟踪区域3 和4 用于监测竖直方向的位移。考虑支座在水平和竖直方向的实际位移最大量为dmm,利用公式(1)和(2)计算线跟踪区域短边的长度为p(单位:px)。

线跟踪区域长边的长度lb(单位:px),可通过公式(4)确定。

3 直线鲁棒检测算子
在确定感兴趣目标区域4 个边缘的线跟踪区域之后,利用线段检测算法对线跟踪区域中的线段进行检测,获取线段的位置信息,从而获取支座的振动位移数据。
3.1 直线线段检测
Hough 变换[7]是直线提取的常用算法,但其算法复杂度较高,且没有结合方向信息,导致误检率较高[8]。线段检测(LSD,Line Segment Detector)算法是由Rafael Grompone 等人[9]于2010 年提出的一种线段检测算法,该算法能结合像素的梯度大小和方向信息准确地提取直线,并能在NFA(Number of False Alarms)的约束下控制虚假直线,无需过多的参数设置。同时,该算法利用Helmholtz 原理来判断直线,从而得到较好的线段检测结果。因此本文利用LSD算法对线跟踪区域中的线段进行检测。
如图4 所示,每个线跟踪区域内仅包含1 条感兴趣区域的边缘线。本文利用LSD 算法提取线跟踪区域内的线段信息,主要包括当前区域内检测到的线段个数及每个线段的端点坐标等。
但直接利用LSD 线段提取的结果来描述靶标边缘仍存在着一些问题,如图4(c)所示,非边缘区域也检测出了一些短线段,这些短线段的存在会影响到边缘位置的确定。因此要对LSD 检测结果的有效性进行判断,从n条线段中找出能描述靶标边缘的线段。

图4 LSD 线检测结果
3.2 线检测有效性分析模型
考虑光照、背景杂波、运动模糊等干扰,通过LSD 线检测可能检测不到有效的线段特征。为对检测结果的有效性进行准确判断,本文设计了一种线检测结果有效性分析模型。
(1)假设在线跟踪区域内检测到了n条线段,第i条线段的端点坐标分别为(xi1,yi1)和(xi2,yi2);
(2)计算线跟踪区域内检测出的各条线段的统计特征,线段长lsi、线段长度比例lri、线段截距bi。其中,线段长,线段长度比例;
(3)利用线跟踪区域内线段的统计特征对LSD 线检测结果的有效性进行分析,具体流程如图5所示。
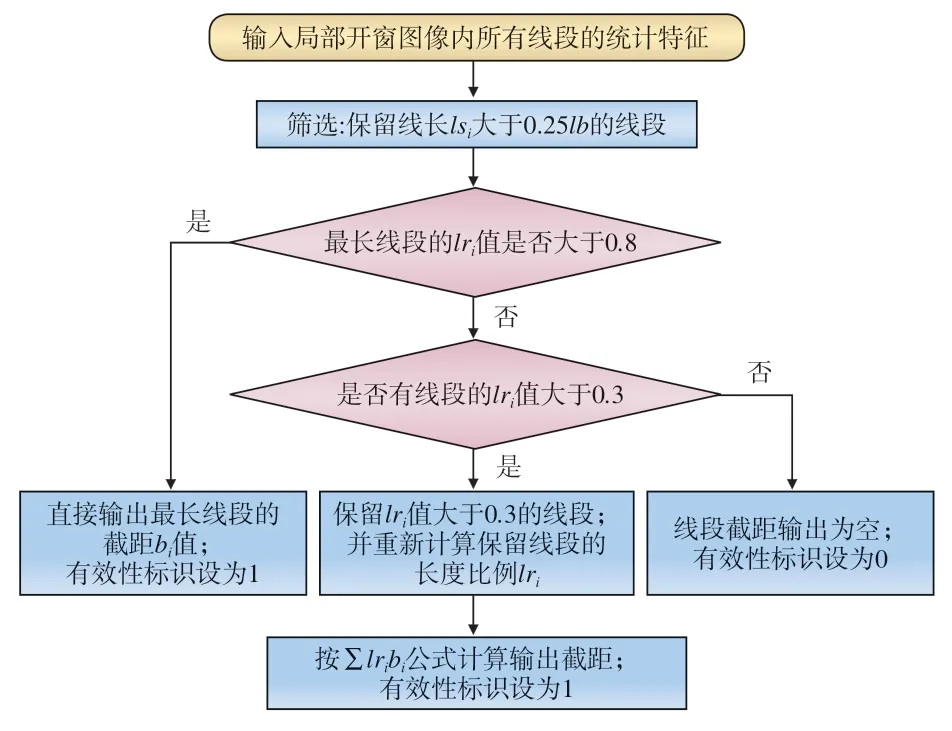
图5 LSD 线检测结果的有效性分析流程
通过上述处理流程可有效标识出各个线跟踪区域内线段检测结果的有效性,有效检测结果所在的帧标记为1,无效检测结果所在的帧标记为0。
4 多帧数据融合滤波器
为过滤无效的检测结果,本文采用一种多帧数据融合滤波器,包括邻近5 帧线跟踪区域内滤波和水平(竖直)方向内目标运动滤波。
4.1 邻近5 帧线跟踪区域内滤波
在连续处理5 帧图像数据后,可以得到邻近5帧的边线截距序列和对应的标识序列(简称:序列组);按照先进先出的更新规则,新一帧的图像处理结果会按顺序进入序列组,同时,序列组中最早一帧的图像处理结果将被移出序列组;在更新序列组之前,需要先判断该帧图像检测得到的线段截距对应的标识是否为0,若为0,则计算更新前的序列组中邻近5 帧的边线截距的平均值作为当前帧的线段截距值,若为1,可直接按先进先出的规则进行序列组更新。
经过上述操作,可利用方形靶标最邻近的目标状态,填补LSD 未有效检测到的边线截距值。假设所有帧图像检测得到的线段截距序列值为(b1,b2,···,bn),将所有序列值都减去第1 个数值b1,可得该边线对应的像素位移变化序列(bo1,bo2,···,bon)。
4.2 水平(竖直)方向内目标运动滤波
处理线跟踪区域1 和区域2 可同时测量待测目标的水平位移变化,而处理线跟踪区域3 和区域4 可同时测量待测目标的竖直位移变化。在完成邻近5帧线跟踪区域内滤波后,考虑按公式(5)融合线跟踪区域1 和区域2 的边线位移变化测量结果。

其中,bo′、bo′′分别表示线跟踪区域1 和区域2中边线的位移。
类似地,可按照同样的规则融合线跟踪区域3和区域4 的边线位移变化测量结果。因此,可计算出每1 帧图像中方靶标在水平和竖直方向的像素位移变化测量结果。设水平方向的像素位移变化测量结果为(bx1,bx2,···,bxn),竖直方向的像素位移变化测量结果为(by1,by2,···,byn)。将比例因子Sf分别乘以方靶标在水平和竖直方向的像素位移变化测量值,即可得到方靶标在水平和竖直方向的实际位移变化值。
5 实验应用
5.1 现场安装和预处理
将本文方法应用到实际场景中,对桥梁支座的位移进行了长时间的监测工作,来验证其有效性和准确性。图6(a)中展示的是安装在现场的监控摄像机和靶标,摄像机的分辨率为3 072×2 048 像素,视频采集帧率为20 f/s,另外,现场还部署一台工控机,利用该工控机对支座振动视频进行处理。
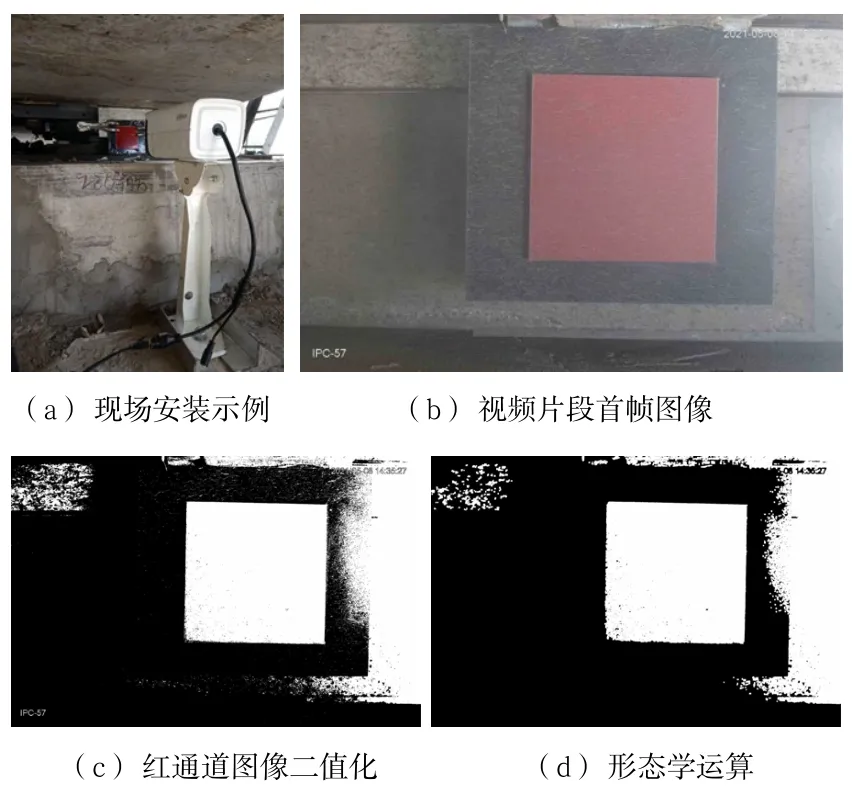
图6 现场安装和预处理结果
以某个实际监测点为例,说明本文所提出方法的具体处理流程:(1)对采集的支座振动视频片段进行分帧处理,得到视频帧序列,图6(b)为支座振动视频片段中的首帧图像;(2)利用大津阈值分割法对首帧图像的红通道图像进行二值化处理,处理结果如图6(c)所示;(3)由于二值化结果中存在许多面积很小的连通体区域,因此,需要利用形态学开运算对二值化后的图像进行处理,去除面积较小的连通体,对比图6(d)和图6(c)可以看出,开运算操作有效地去除了面积较小的连通体。
5.2 感兴趣目标获取结果
利用连通体分析搜索图中所有的连通体,图7(a)虚线框中标注的区域均为连通体,需要从这些连通体中筛选出感兴趣区域。由于已知靶标的长宽比、面积等,可利用这些信息对连通体区域进行筛选,从而确定感兴趣区域的坐标信息,得到图7(b)中感兴趣区域左上角端点的坐标为(1 277,355),边长分别为1 082、1 080 像素。红色方形靶标的实际边长为60 mm,由公式(1)和公式(2)可计算出比例因子Sf≈0.056 mm/px。

图7 感兴趣目标获取结果
根据现场环境中支座的实际位移变化情况,本文采用的水平和竖直最大位移量为8 mm,确定靶标4 个线跟踪区域,如图7(c)所示。
5.3 位移测量
对4 个线跟踪区域的靶标边缘分别进行LSD 线检测,得到各个线跟踪区域中靶标的像素位移数据,并将像素位移结果与比例因子Sf相乘,得到各个线跟踪区域中靶标的位移数据,其位移曲线如图8所示。
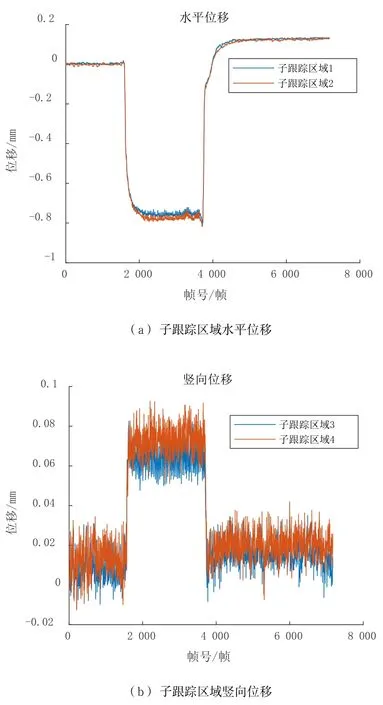
图8 各个线跟踪区域的位移曲线
图8(a)中的两条位移曲线和图8(b)中的两条位移曲线的变化趋势基本一致,经过计算,两组位移结果的皮尔逊相关系数均在0.95 以上,说明两组位移结果分别呈现极强的正相关。再利用多帧数据融合滤波器分别将线跟踪区域1 和区域2、线跟踪区域3 和区域4 的结果进行融合,从而得到桥梁支座实际的位移时程曲线,如图9 所示。
从图9 可以看出,在列车某次通行的过程中,该桥梁支座的水平位移约为0.9 mm,竖向位移约为0.08 mm,且该位移曲线变化趋势较为明显,可反映出列车通行过程中的完整位移。

图9 多帧数据融合后的位移时程曲线
6 结束语
本文提出了一种基于线特征跟踪的铁路桥梁支座位移监测方法,该方法利用大津法和连通体分析法从支座振动视频的首帧图像中自动获取感兴趣目标区域,并基于感兴趣区域确定线跟踪区域;利用线检测算法对各帧图像中线跟踪区域进行线检测,通过统计各帧图像中线段的位置信息,计算出支座的振动位移数据;利用多帧数据融合滤波器对桥梁支座振动位移数据进行后处理,得到列车通行时支座的时程曲线。为验证该方法的有效性,本文将其应用到实际场景中,并对桥梁支座的位移进行了长时间的监测工作。实验结果表明,该方法可有效监测靶标平面内两个垂直方向的位移,且测量精度高、简单易行,有效弥补了现有的基于结构物表面纹理特征跟踪的支座振动位移测量算法容易受光照、背景杂波、运动模糊等因素干扰的缺点,在非接触位移测量领域具有广阔的应有前景。
猜你喜欢
今日农业(2022年4期)2022-11-16
作文周刊·小学一年级版(2022年24期)2022-06-18
火力与指挥控制(2022年3期)2022-04-27
辽宁工业大学学报(自然科学版)(2022年1期)2022-01-15
铁道建筑(2021年10期)2021-11-08
建材发展导向(2021年15期)2021-11-05
军民两用技术与产品(2021年10期)2021-03-16
佛山陶瓷(2019年10期)2019-11-29
师道·教研(2019年7期)2019-08-13
佛山陶瓷(2018年6期)2018-09-14