透地定位系统的信号采集与处理
2022-02-18 13:54赵玮
承德石油高等专科学校学报 2022年6期
赵 玮
(河北石油职业技术大学,机械工程系,承德 067000)
透地定位系统是一种用电磁波来快速、有效的确定地下以及矿井隧道中施工人员的一种定位系统[1]。但是由于在透地定位的过程中,矿井隧道周围的矿物、土壤以及其他介质对电磁波有很强的吸收以及屏蔽作用,因此需要对透地定位过程中的一些方面进行特殊的技术措施[2]。
透地定位系统的关键在于信号采集系统,因此在矿井隧道中能够采集到较完整的有用信号就是透地定位过程中的一个重要环节,并且在采集到有用信号后要对信号进行适当处理,便于后续的数据分析。为此,本文根据透地定位系统的组成与所使用的电磁波频率,给出了透地定位系统的信号采集方法,并且通过数字滤波的处理方法获得了有用信号的幅值。根据矿井现场的环境设计了透地定位实验,根据实验数据建立了在实际情况下的电磁波传播模型,对人员实现了初步定位。
透地定位技术是用来快速、有效地确定地下以及隧道中施工人员位置的一项定位技术。但是由于在透地定位的过程中,周围介质对电磁波有吸收以及屏蔽的作用,因此需要对透地定位过程中的一些方面进行特殊的技术措施[1]。
透地定位技术的关键在于定位信号的采集[2],因此在地层下能够采集到较完整的有用信号就是透地定位过程中的一个重要环节,并且在采集到有用信号后要对信号进行适当处理,便于后续的分析。为此,本文根据透地定位系统的组成与所使用的电磁波频率,给出了透地定位系统的信号采集方法,并且通过数字滤波的处理方法获得了有用信号的幅值。
1 透地定位系统的组成
透地定位系统一般由电磁波发射系统、大地信道以及电磁波接收系统三部分组成,其工作原理如图1 所示。
电磁波发射系统为透地定位系统提供电磁波信号,其中发射系统中的控制部分提供控制信号,用来控制驱动部分通过发射天线发射电磁波;接收系统用于接收由电磁波发射系统发射出的电磁波信号,并进行信号采集与后续的处理分析。
2 透地定位系统电磁波频率的选择

电磁波在大地中传播时,由于大地是半导电介质,因此要吸收很大一部分电磁波的能量,且电磁波的频率越高,地层所吸收的电磁波能量就越多,电磁波能量衰减就越严重,能够达到的最远距离就越小。相反,使用较低的电磁波发射频率能够减少电磁波能量的衰减,从而可提高电磁波的穿透能力,增加传播距离。因此要想使电磁波具有强穿透力,必须使发送电磁波的频率尽可能地降低[3]。
在透地定位系统中工作频率的选择上,既要使之能够满足透地定位中穿透地层的要求,又要考虑各国对无线电频段的使用规定。在透地定位的过程中,衡量信号能够穿透地层深度的物理量称为集肤深度δ,其表达式如式1 所示。

其中ω为发射电磁波的角频率,σ为地层的平均电导率,μ为真空中磁导率。例如,假设某地层处的地层电导率为0.001 S/m,并且磁导率与真空的磁导率相同,则集肤深度与电磁波频率的关系如图2 所示。
由图2 可知,在其他条件相同的情况下,若想要在地层中传播更远的距离,就要降低电磁波的频率。根据电磁波频段的划分可知,电磁波频率在300~3 kHz 为特低频,3 kHz~30 kHz 为甚低频,30 kHz~300 kHz 为低频[4]。由于甚低频电磁波信号对大地介质有良好的穿透作用[5],这就决定了甚低频电磁波可以用于远距离、复杂环境中的通信,例如隧道定位系统、矿井通信系统等。所以在透地定位系统中,选择甚低频电磁波频段的下限频率3 kHz 作为定位系统的电磁波频率。

3 透地定位系统的信号采集
透地定位系统的信号采集由电磁波接收系统来完成[6],信号采集系统包括接收天线部分、阻抗匹配部分、滤波放大部分以及A/D 转换部分。信号采集系统的组成框图如图3 所示。
接收天线 接收天线接收空间中的电磁波信号并将其转换成对应的电压信号,通过谐振电路使接收到的甚低频电磁波信号幅值达到最大。为了使得电路中的电流大一些以便于有用信号的识别,因此采用串联谐振电路对接收到的甚低频电磁波信号进行选频。

阻抗匹配变压器 接收天线接收到由透地定位发射系统发射的电磁波后,需要经过传输线传输到接收机。为了使接收机接收到的有用信号功率达到最大,需要使接收机与接收天线的阻抗能够很好地匹配。阻抗匹配是通过阻抗匹配变压器实现的,通过适当调整阻抗匹配变压器的一、二次线圈的匝数比,可以使接收天线的输出功率达到最大。
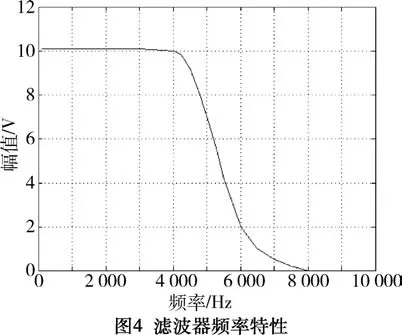
滤波放大电路 由于天线接收到的电磁波信号中夹杂着工作环境中的高频干扰信号,因此要对信号进行低通滤波处理,滤除高频干扰信号。低通滤波器选用了MAXIM公司生产的MAX274AEWI 滤波芯片,它可以实现在100 Hz 到150 kHz 范围内的任何频率的低通滤波功能。根据透地定位信号采集部分的工作环境与信号频率,设计了上限截止频率为8 kHz,下限截止频率为4 kHz 的低通滤波器,图4 为所设计的滤波器的频率特性。
从图4 中可以看出,经过低通滤波后,信号中4 kHz以上的高频干扰部分被衰减的很弱,大部分高频信号被滤除,符合透地定位接收系统保留3 kHz 频率并且滤除高频信号的要求。
A/D 转换电路A/D 转换电路是实现信号采集的核心环节,为实现信号的采集,设计了如图5 所示的A/D 转换电路。
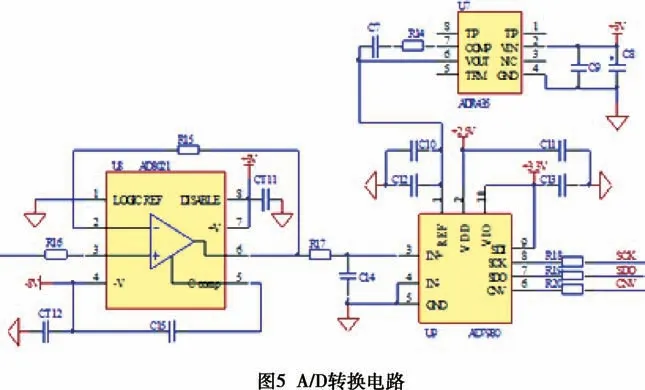
该电路包含AD7980ADC、AD8021 放大器和ADR435 基准电压源。AD7980 是一种16 位ADC,其基准输入电压范围为2.4 V 至5.1 V,电源电压为2.5 V。AD8021 放大器用来将滤波后的信号放大,使之尽可能接近AD7980ADC 的输入电压范围,提高信号采集的分辨率。由采样定理知,采样频率应高于信号中的最高频率的2 倍,才能保证采样后的信号不失真地保留原始信号中的有用信息。因此根据所选A/D 转换芯片的特性与实际系统的工作需要,选择48 kHz 的采样频率。
4 接收系统的信号处理
由信号采集部分采集到的数字信号进入计算机后,还要对其进行信号的处理与分析。所采集到的原始信号的波形与频谱如图6(a)、6(b)所示。

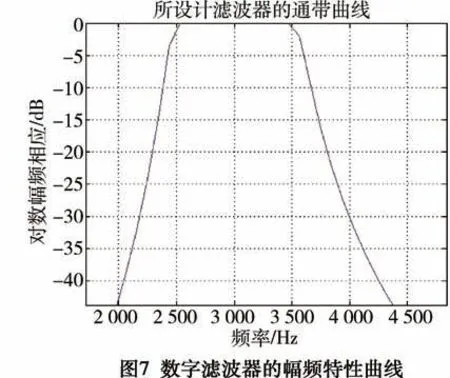
由图6 可以看到,在接收的信号中,含有很强的50 Hz 工频干扰,因此为了能够准确读出有用信号的幅值,就要滤除该干扰信号。干扰信号的滤除是用数字滤波实现的,在Matlab 环境下,设计了通带左边界为2.5 kHz、通带右边界为3.5 kHz、衰减截止左边界为2 kHz、衰减截止右边界为4 kHz 的数字带通滤波器[7],其幅频特性曲线如图7 所示。
原始信号通过该数字滤波器后的波形与频谱如图8(a)、8(b)所示。
由图8 可以看到,经过数字滤波处理后,50 Hz 的干扰信号被滤除,只留下了3 kHz 有用信号,并且在对原始波形进行FFT 变换后可清楚地读出3 kHz 有用信号。根据数字滤波后的频谱与FFT 变换前后的幅值关系即可求得接收端接收到的实际信号强度。由信号强度与待定位点的坐标之间的关系即可确定待定位点的坐标。

5 结论
本文根据透地定位系统的实际工作需要,确定了透地定位系统的工作频率,设计了信号采集与处理系统。系统利用高性能的A/D 转换器实现了信号采集,在Matlab 环境下对信号进行了数字滤波等处理,从而保证了透地定位的可靠、准确。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
计算技术与自动化(2022年2期)2022-07-04
计算技术与自动化(2022年2期)2022-07-04
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
海军航空大学学报(2021年1期)2021-09-01
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
空间电子技术(2020年2期)2020-06-04
通信电源技术(2020年22期)2020-03-27
西安电子科技大学学报(2018年5期)2018-10-11
科技创新导报(2016年8期)2016-10-21