“机电一体化系统仿真”课程思政的教学探索*
2022-02-18 09:43倪修华徐尧天付斌王涛
科学与信息化 2022年3期
倪修华 徐尧天 付斌 王涛
1. 上海应用技术大学 上海 201418;2. 上海无线电设备研究所 上海 201109;3. 上海航天电子通讯设备研究所 上海 201109
引言
习近平总书记在2016年12月7日至8日召开的全国高校思想政治工作会议上指出:“要用好课堂教学这个主渠道,思想政治理论课要坚持在改进中加强,提升思想政治教育亲和力和针对性,满足学生成长发展需求和期待,其他各门课都要守好一段渠、种好责任田,使各类课程与思想政治理论课同向同行,形成协同效应。”[1]。
“机电一体化系统仿真”的课堂目标是要求学生掌握Matlab常用的绘图命令和程序设计方法。通过机械专业涉及的学科仿真软件对比、整体与细节思维的融入和事物的多角度思维融入3个方面将思政元素融入课程当中。
1 机械专业涉及的设计仿真软件对比
工业实际应用的机械产品通常需要考虑多体运动及动力学、弹性体静力学及动力学、流体力学、机电控制系统特性等多方面的特性,通常需要借助仿真工具进行仿真分析。以下就机械专业学生所涉及的常用设计仿真工具进行对比分析,一方面为了丰富学生的知识面,培养全局性思维;另一个方面通过对比分析,了解国产化自主可控软件的现状。
目前主流的机械三维建模软件有法国达索公司的CATIA和Solidworks软件、美国PTC公司的CREO软件、德国西门子公司的UG和SOLIDEDGE软件,以及国内广州中望龙腾软件股份有限公司的中望3D软件、数码大方(CAXA)的3D软件。整体而言,欧美国家的三维建模软件占据了绝大部分市场份额,但国内的中望3D软件在中国核电、恒大地产、海马汽车、海尔等有所应用,数码大方(CAXA)的3D软件在华为、福田汽车、珠海格力、东风汽车等公司也有所应用。本溪市化学工业学校将CAXA软件作为“机械零件课程设计”的3D建模和2D绘图软件[2]。
多体运动及动力学仿真是以“机械原理”和“理论力学”两门课程为理论基础,目前使用的主流仿真软件有瑞典海克思康公司的(曾为美国MSC公司,后被收购)ADAMS软件、法国达索公司的SIMPACK软件和韩国Function Bay公司RECRUDYN软件,国内自主研发软件未见报道。
弹性体静力学及动力学仿真以“材料力学”为理论基础,采用的方法多为有限单元法,目前使用的主流的仿真软件是美国ANSYS公司的Ansys Mechanical、法国达索公司的ABAQUS和瑞典海克思康公司的(曾为美国MSC公司,后被收购)Nastran软件,以及国内的安世亚太公司的PERA SIM. Mech软件、广州中望龙腾软件股份有限公司的中望结构仿真软件等。国内自主研发的仿真软件除了安世亚太的PERA SIM. Mech软件在国防军工领域有所应用之外,其他软件的应用鲜有报道。
流体力学仿真以“流体力学”课程为基础,目前使用的主流仿真软件有美国ANSYS公司的Fluent软件、美国ANSYS公司的CFX软件以及国内安世亚太公司的PERA SIM. Fluid软件,与弹性体静力学及动力学仿真软件类似,流体力学仿真软件市场几乎被国外大公司所垄断,自主研发的PERA SIM. Fluid软件,也只有在战斗机外流场分析和导弹气动计算等军工国防领域有相关应用报道。
机电控制系统特性仿真分析是将机械、控制、传感等多个模块组合成一个整体进行仿真,工具软件主要有美国Mathwoks公司的Matlab软件、西门子公司的LMS AMESim软件和瑞典海克思康公司的(曾为美国MSC公司,后被收购)Easy5软件,国内未发现有自主开发的相关软件。2020年5月22日,美国商务部工业与安全局以国家安全或外交政策利益为由,把33家中国科技公司和机构、高校等拉进清单,清单上的单位将不得使用Matlab软件。
从以上的对比分析可以看出,机械相关的自主研发软件当中,除少量的三维建模软件能够在国内市场占有少量份额之外,其他行业或是没有自主研发软件,或是应用客户十分稀少。在授课过程中,向学生传递国产软件的自主可控可以防止关键时刻被他人“卡脖子”的观点。除了软件自身能力水平以外,还有一个重要的问题是软件的生态问题,这与华为鸿蒙系统类似。目前,高校用于教学的机械相关设计仿真软件也是以国外软件为主导。这方面可以通过国家工业主管部门、教育部门和相关企业进行联合,出台相应的扶持政策,对高校教学过程中使用自主可控软件的应予以政策倾斜支持。如此一方面提高软件的知名度和用户群体,另一方面学生毕业走向工作岗位后也是国产软件的潜在用户,此外还可以培养学生的家国情怀。
2 整体与细节思维及工匠精神的融入
仿真的置信度问题是仿真工程师所需要解决的关键问题。对同一个问题,受限于不同工程师的认知水平、仿真的简化设置等因素,得到的结果可能大相径庭。所以尽管仿真经过几十年的发展得到了长足的进步,但仿真仍然还不能达到替代实验的地步,但减少了试验次数和迭代周期。
以一个印制板及其安装盒体组成的组件为例,说明系统的模态仿真流程,如图 1所示。

图1 PCB板的动力学仿真流程
具体的仿真验证流程如下:①进行印制板裸板的仿真验证。印制板在焊装器件之前,是由多层基板及基板之间的覆铜层所组成,其难点在于覆铜层的质量及其分布假设。需要通过模态实验实测修正参数,以使仿真误差在允许接受的范围之内。②进行焊装完元器件后印制板的仿真验证。其难点在于元器件与印制板之间连接关系的设置,以及数量多而质量小的元器件质量分布设置。需要通过模态实验实测修正参数,以使仿真误差在允许接受的范围之内。③进行印制板与安装盒体的连接仿真验证。对印制板与安装盒体之间的安装螺钉连接进行简化设置,并通过实验验证修改仿真模型,以使仿真误差在允许接受的范围之内。
只有经过以上3步的逐步仿真和验证确认,才可以保证仿真的误差在可接受的范围之内。引入印制板及其安装盒体的模态仿真流程的例子,旨在传递整体与细节的思维,以及每一个细节都认真对待的工匠精神。
3 事物的多角度思维融入
在“机电一体化系统仿真”课程中,控制系统的稳定性是非常重要的概念。控制系统稳定性是指控制系统在外部扰动作用下偏离其原来的平衡状态,当扰动作用消失后,系统仍能自动恢复到原来的初始平衡状态,则称系统是稳定的,否则称系统是不稳定的[3]。以某一系统两种稳定性判定方法的应用以及系统在阶跃作用下的响应情况进行说明。
某单位负反馈系统的开环传递函数表达式如式(1)所示。

利用Matlab软件求解可以得到其闭环特征方程的3个根分别为-6.7660、-0.6170+2.5040i和-0.6170-2.5040i。由于特征方程的根全部具有负实部,因为可以判定系统是稳定的。
利用Matlab软件绘制该系统开环传递函数的Bode图,如图2所示。由图可知,该系统的幅值裕度为8.52dB,相位裕度为29.8°,该系统具有正的幅值裕度和相位裕度,因此可以判定该系统是稳定的。

图2 系统的开环Bode图
系统在单位阶跃下的响应如图3所示。由图可知,系统在输入的扰动作用下,系统总体是振荡收敛的,经过一段时间以后可以逐渐稳定在某一状态。根据稳定性的定义可知,该系统是稳定的。
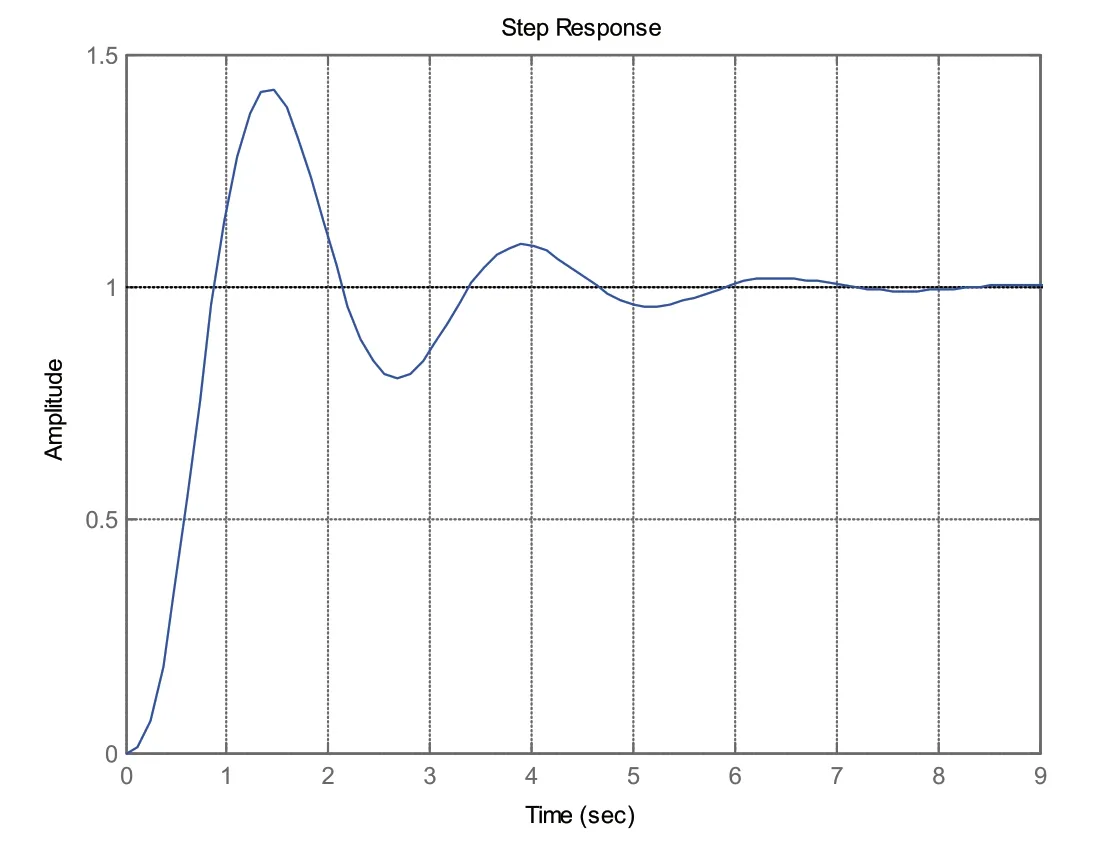
图3 系统的单位阶跃响应图
从闭环特征方程的根、开环传递函数的幅值裕度和相位裕度以及系统的单位阶跃响应3个方面来看,系统都是稳定的。通过本案例融入说明一个事物的本质存在多个表象的哲学思维。
4 结束语
对“机电一体化系统仿真”课程的思政元素融入从3个方面进行了探索。首先结合当下中兴、华为被制裁的时政热点,对机械专业涉及的设计仿真软件对比,说明自主研发的机械相关设计仿真软件现状,融入了家国情怀的思政元素,同时也培养了学生的全局观;结合印制板及其安装盒体的模态仿真流程,融入整体与细节思维及工匠精神的思政元素;结合控制系统稳定的定义及判定方法,融入事物的多角度思维的思政元素。以上教学探索方法对于“机电一体化系统仿真”课程的思政建设具有一定的效果,对于其他课程的思政建设也具有一定的借鉴意义。
猜你喜欢
英语文摘(2021年10期)2021-11-22
制导与引信(2020年1期)2020-08-25
当代工人(2020年8期)2020-05-25
摄影之友(影像视觉)(2019年3期)2019-03-30
环球市场信息导报(2018年29期)2018-10-16
小溪流(画刊)(2017年12期)2018-01-10
移动信息(2017年7期)2017-11-20
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
CHIP新电脑(2015年10期)2015-10-15
科技传播(2012年8期)2012-10-14