
空间三轴激光陀螺高精度抖动剥除算法研究
2022-02-18 03:22:24刘黎映陈军军司如意
导航定位与授时 2022年1期
张 迪,刘黎映,陈军军,司如意,谢 鑫,张 蕾
(1.空军装备部驻北京地区第二军事代表室,北京 100074;2.北京自动化控制设备研究所,北京 100074)
0 引言
当前,激光陀螺具有启动快、寿命长、数字输出、动态范围宽、可靠性高等诸多优点,是高精度惯性导航系统的优选惯性传感器,广泛应用于捷联惯性导航系统中。近年来,惯性导航系统对高精度、小型化激光陀螺的需求日益迫切。空间三轴机抖激光陀螺具有部件少、体积小、质量小、结构紧凑以及良好的力学性能等优势,符合惯性系统的发展趋势,是机抖激光陀螺的发展方向。
针对空间三轴机抖激光陀螺存在的闭锁效应,通常采用的方法是给激光陀螺仪加上一个周期的正弦抖动调制信号,因此在未经处理的陀螺仪原始零偏中,实际的外界角运动输入淹没在人为引入的调制信号中,要实现外界角运动输入的准确检测,就必须去除这些正弦调制信号。因此,高精度地提取外界敏感的角速度信号,准确滤除正弦抖动信号,是提高空间三轴机抖激光陀螺精度并拓宽其应用领域的基础。
激光陀螺仪常用的信号处理算法有整倍数周期计数和高频采样滤波两种。整倍数周期计数法的优点是原理清晰,电路结构比较简单,但输出结果的更新频率取决于机抖周期,使用受限;高频采样滤波是通过设计数字滤波器达到滤除机械抖动的目的,响应速度快,且其输出结果的更新频率和高频采样的周期保持一致,但由于机械抖动的幅值较大,纯数字的单一滤波器要想得到足够的信号衰减必须有相当高的阶数,然而阶数过高又会造成滤波精度下降、系统输出延时过大等缺点。
本文创新性地提出了一种空间三轴机抖激光陀螺高精度信号抖动分量剥除算法,通过完成较低阶数的滤波器组合设计,可实现外界输入信号的高精度高动态解调,满足空间三轴机抖激光陀螺在高精度和实时性方面的需要,可拓展激光陀螺的应用领域。该信号处理算法简单可靠,计算量小,环境适应性较强,具有重要的工程实用价值。
1 自适应陷波算法
自适应陷波算法在通信、雷达和控制等诸多需要运用现代数字信号处理技术的工程领域具有广泛应用,主要用于估计、检测和滤除强背景噪声中的弱输入信号,一般为正弦信号。自适应陷波器在合理利用前一时刻所得滤波器参数的前提下,自动调节当前时刻的滤波器参数,通过适应未知变化的信号和噪声的统计特性,最终达到有效滤波的目的。
自适应陷波器的幅频特性曲线在特定频率即陷波频率处等于1,在其他频率处均为0,当外界输入信号频率变化时,陷波频率可以自动调整并跟随。因此,自适应陷波器的使用既可以消除正弦信号扰动的干扰,也可以从噪声中的正弦信号检测出信号频率。
同理,通过采用自适应陷波器估计空间三轴机抖激光陀螺的机抖频率,可以达到高精度快响应地剥除抖动信号的目的。
自适应滤波的结构如图1所示,其传递函数为

图1 自适应滤波器的结构图Fig.1 Structure of designed adaptive notch filter

(1)
式中,为用于估计信号陷波频率的系数,经过一定次数的迭代自适应,会收敛到-cos,为被处理信号()的归一化频率;参数决定着陷波频率的陷波宽度。
整个自适应频率估计过程为:
首先求出()

(2)
接着,调整
()=()(-1)+[1-()](-
1)[()+(-2)]

其中,是遗忘参数。为保证陷波器的稳定收敛,参数满足∈[-1,1]。因此,应设定以下检测环节

(3)
则设计的自适应陷波器输出为

(4)
增强的基频信号即为()-(),信号的频率估计值可由式(5)计算求得

(5)
为实现较快且高精度地滤除外界信号,可将陷波器的陷阱带宽在初始阶段设得稍大一些,使得陷波器在开始阶段较快地捕捉到未知信号的频率,而后在迭代过程中逐步调小范围。针对不同的应用环境,能够保证陷波器系统稳定的参数可取不同的值。当输入信号较为平稳,的取值应稍大一些,尽可能地靠近1,以期获得较好的滤波精度效果;在外界输入角速度信号变化较快时,适当调小ρ,达到保证陷波器频率跟踪能力的目的。
通过调整遗忘参数和系统稳定参数,不仅可保证陷波器滤波精度,还可实现对信号频率变化的快速跟踪。
2 自适应陷波算法的仿真
实验中,空间三轴激光陀螺静止放置在具有地基的水平大理石台面上,输入包括地球自转角速度分量和正弦机械抖动角分量。数字信号处理系统的采样频率为10kHz。
首先对激光陀螺原始输出信号的时域特性及频谱进行分析,如图2所示。可以看出,陀螺仪的原始信号中包含正弦机械抖动信号,同时得到正弦机械抖动信号的频率范围为370~470Hz。需要对该原始数据进行信号处理滤波,滤除外界人为加载的正弦机械抖动信号。

(a)
使用自适应陷波器对采样数据进行预滤波,根据上述频谱分析设定滤波器的初始调节参数如下
=09999,()=097-007×099-1
(6)
图3所示为陷波器的频谱图和经过二级级联陷波器预滤波后的信号频谱。可以看出,机械抖动信号的频谱由自适应陷波器过程对于机械抖动信号的剥除存在较强的抑制能力。由滤波后的信号频谱还可以看出,机械抖动信号存在若干倍频点,需要滤波器组合将倍频信号滤除,才能高精度地提取外界输入角速度。

(a)
此处选用有限冲击响应(Finite Impulse Response, FIR)滤波器,可以保证严格精确的线性相位。通过Matlab Fdatool工具箱进行等纹波FIR低通滤波器设计,技术指标如式(7)所示
=100Hz,=400Hz,=1dB,=80dB
(7)
其中,为通带截止频率;为阻带截止频率;为通频点信号衰减程度;为阻频点信号衰减程度。
得到的36阶等纹波FIR滤波器的幅频特性和相频特性曲线如图4(a)所示,滤波后的数据频谱如图4(b)所示。由图4可知,经FIR滤波后,机抖频率的倍频点基本滤除,极大地减弱了杂波信号的影响。

(a)
根据FIR滤波器的时间延时公式可知,该滤波器组合的延时为36/(*2)=1.8ms,其中是采样频率,为10kHz。使用该滤波算法优化了信号处理系统的处理速度,可满足高速跟踪的要求。针对更高动态要求的控制系统,通过调整滤波器的参数和阶数,在保证高精度的同时可以得到更低的时间延时。
3 系统验证及结论
使用某型空间三轴机抖激光陀螺进行实验。实验过程中,将激光陀螺固定在大理石台面上,均是同一状态且冷态启动,分别利用纯数字滤波算法与本文提出的滤波器组合算法进行零偏稳定性和随机游走测试,零偏稳定性的测试时间为3600s,随机游走的测试时间为8h。
图5所示为使用高精度抖动剥除算法后的空间三轴激光陀螺静态零偏输出。图6所示为利用Allan方差分析得出的陀螺随机游走,具体测试数据如表1所示。从以上实验结论可知,本文设计的空间三轴机抖激光陀螺抖动剥除滤波算法,可完成陀螺零偏输出信号中机械抖动分量的高精度滤除。

图5 空间三轴激光陀螺静态输出Fig.5 The static output of orthogonal triaxial laser gyro

图6 基于Allan方差分析的随机游走Fig.6 Random walk based on Allan analysis
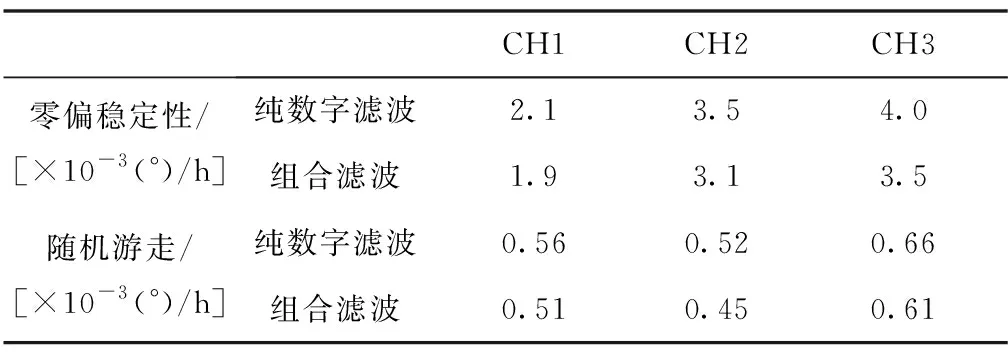
表1 陀螺不同滤波算法下的静态精度
4 结论
本文为提高静态和高速率动态环境下激光陀螺对外界输入信号频率的准确跟踪能力,针对激光陀螺的抖动剥除算法开展研究,提出了新型的信号处理方案,结论如下:
1)原始激光陀螺仪常用的信号处理算法有整倍数周期计数和高频采样滤波两种,难以满足高动态环境下陀螺对外界输入信号的准确跟踪,自适应陷波器能够在特定频率点处实现较大的信号幅度衰减,为提高滤波精度提供了可能。
2)高精度和快响应的兼顾,是空间三轴机抖激光陀螺在推广应用过程中的首要挑战。仿真结果表明,采用自适应陷波器+FIR滤波器的组合方案设计,只需较低阶数的数字滤波器,能够保证输入信号的高精度快响应提取。
3)针对纯数字滤波算法和滤波器组合算法对陀螺的零偏稳定性和随机游走进行了对比实验验证。实验结果表明,滤波器组合方案能够兼顾空间三轴机抖激光陀螺高精度和快响应,具有很强的工程实用价值。
猜你喜欢
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
西部广播电视(2015年3期)2016-01-15 02:05:44
山东冶金(2015年5期)2015-12-10 03:27:41
广西科技大学学报(2015年4期)2015-02-27 12:22:27
