
天象一号低轨导航增强系统研究与在轨试验验证
2022-02-18 09:45蔚保国武子谦伍蔡伦盛传贞
导航定位与授时 2022年1期
蔚保国,武子谦,伍蔡伦,谢 松,盛传贞
(1. 卫星导航系统与装备技术国家重点实验室,石家庄 050081;2.中国电子科技集团公司第五十四研究所,石家庄 050081)
0 引言
随着人工智能时代的到来,自动驾驶、无人机、无人船等应用领域对全球无缝覆盖的高精度瞬时定位提出了明确的需求。然而,当前包括北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)、全球定位系统(Global Positioning System,GPS)、GLONASS、 Galileo在内的全球卫星导航系统(Global Navigation Satellite System,GNSS),以及准天顶卫星系统(Quasi-Zenith Satellite System,QZSS)、印度区域导航卫星系统(Indian Regional Navigation Satellite System,IRNSS)等区域卫星导航系统的基本导航服务定位精度均为米级,远不能达到高精度应用的要求。精密单点定位(Precise Point Positioning, PPP)技术可以实现高精度定位,但其收敛时间较长,无法满足瞬时高精度定位的需求。各卫星导航系统的地基增强和星基增强系统能够在一定程度上提高快速定位的精度,但需要大量布设地面监测站,且只能为一定区域范围内的用户提供高精度定位服务,不能满足全球范围内的瞬时高精度服务的应用需求。
为满足全球用户日益增长的瞬时高精度导航定位需求,低轨导航增强技术应运而生。低轨导航增强是近年来提出的一个新概念技术,即利用低轨卫星的一系列特点,基于低轨卫星组网方式提供全球范围内的实时高精度导航增强服务,增强传统卫星导航系统的服务性能。国内外众多学者开展了基于低轨星座的导航性能和PPP收敛时间的仿真试验分析。
考虑到导航增强的实现需要低轨星座具备一重甚至多重覆盖的星座建设要求,大型低轨通信星座成为低轨导航增强的首选星座。近年来兴起的低轨卫星星座建设为辅助卫星导航系统,为全球瞬时高精度定位服务提供了良好契机。铱星作为全球首个建设完成的低轨通信星座,已于2019年初完成了整个星座的升级,可对地面用户提供卫星时间和位置(Satellite Time and Location, STL)服务。SpaceX、三星、波音等企业也都在组建其大型低轨星座。我国前期几个主要的低轨通信星座,包括天地一体化信息网络、虹云、鸿雁、微厘空间以及箭旅镜像均将低轨导航增强纳入其试验范围。鸿雁全球导航增强系统采用地面中心站集中处理后上注卫星播发的技术体制完成信号增强和信息增强。武汉大学研制的珞珈一号科学试验卫星,基于星上实时处理的技术体制,首次开展了低轨导航信号增强在轨试验验证。
为了适应国家发展形势,国家统筹规划成立了中国卫星网络集团有限公司,大力发展和建设低轨通信与导航融合的巨型星座网络。该卫星互联网是支撑国家安全、引领科技创新、带动产业发展的战略性工程,以通信与导航深度融合为手段,提供更加泛在、更加融合以及更加智能的定位、导航与授时(Positioning, Navigation, and Timing,PNT)服务,重点在定位精度、完好性、天基监测以及备份导航等方面提高性能,以满足国家综合PNT体系建设的需要。当前国内外低轨卫星星座建设信息如表1所示。

表1 低轨卫星星座信息一览表
目前,低轨导航增强系统的技术体制尚未收敛,在很多技术细节上还未形成业内统一的设计标准。本文阐述了天象一号低轨导航增强试验系统的技术体制,主要包括系统工作模式、兼容互操作与通导一体化信号体制,以及实时自主定轨、快速高精度定位、完好性监测服务等关键技术,基于实测和仿真数据开展了在轨试验验证,相关的结论或可为未来低轨导航增强系统的建设提供支持。
1 天象一号低轨导航增强系统的组成
天象一号试验卫星于2019年6月5日在我国黄海海域搭载长征十一号运载火箭,成功进入预定轨道。作为天地一体化信息网络的先导试验卫星工程,天象一号试验卫星工程开展了低轨卫星通信、导航和遥感等一系列新技术的应用探索,其主要任务之一是开展低轨导航增强技术体制探索试验。天象一号试验卫星低轨导航增强系统主要由空间段和地面段组成,其组成架构如图1所示。

图1 天象一号低轨导航增强系统组成架构Fig.1 Architecture of Tianxiang-1 LEO navigation augmentation system
天象一号低轨导航增强系统空间段主要由2颗天象一号小卫星及其星上载荷组成。天象一号双星均搭载了低轨导航增强载荷,用于开展低轨导航增强在轨试验验证。低轨导航增强载荷可接收北斗B1/B2频点和GPS L1/L2频点的导航信号,自主完成星上实时定轨和广播电文生成与播发,并具备发射Z1/Z2频点的低轨下行导航信号的功能。天象一号试验卫星及其导航增强载荷外观如图2所示。

图2 天象一号试验卫星及其导航增强载荷Fig.2 Tianxiang-1 experimental satellite and its navigation augmentation payload
天象一号低轨导航增强系统地面段主要由监测站、关口站和运控中心组成。监测站负责采集天象一号Z1、Z2频点的下行导航信号及其导航电文;关口站负责接收低轨导航增强载荷采集的星载北斗/GPS观测数据;地面运控中心(如图3所示)的主要功能包括卫星管理控制、综合信息处理、系统监测评估和在轨试验验证。卫星管理控制主要包括各类试验调度和管理、星上载荷的开关控制;综合信息处理主要负责各类观测数据的处理,以及各类高精度产品的生成;系统监测评估主要开展对卫星、地面设备工况和运行状态的监测,以及各类产品和用户服务性能的监测评估;在轨试验验证主要负责技术体制的在轨验证和关键技术的探索试验。

图3 天象一号试验卫星系统地面运控中心Fig.3 Ground operation and control center of Tianxiang-1 experimental system
2 天象一号低轨导航增强技术体制
天象一号低轨导航增强系统采用与现有GNSS和通信信号兼容互操作的信号体制,完成信号测距和信息的播发。时空基准的建立与维持采用星上实时自主定轨和地面中心处理相结合的设计原则,生成高可靠、高可用性的低轨卫星广播星历和GNSS增强及完好性信息,为地面用户提供瞬时高精度定位服务。天象一号低轨导航增强监测评估子系统对系统工况、星座状态以及服务性能开展监测评估。天象一号低轨导航增强系统的工作原理如图4所示。

图4 天象一号低轨导航增强系统工作流程图Fig.4 Operating principle flow chart of Tianxiang-1 navigation augmentation system
2.1 低轨导航增强系统工作模式
天象一号低轨导航增强系统具备信号增强和信息增强两种增强服务模式。信号增强是指将低轨卫星作为导航源。天象一号试验卫星可对地发射导航信号,一方面可增加地面用户的可见星个数,增强GNSS的可用性;另一方面低轨卫星运行速度快,具有更快的空间几何变化,能够加快地面用户高精度定位的收敛时间。信息增强是指天象一号试验卫星可转发地面信息处理中心生成的GNSS精密产品信息,从而提高用户的定位精度。
天象一号低轨导航增强载荷具备三种工作模式,分别是高精度观测模式、导航增强模式和低功耗工作模式。当载荷处于高精度观测模式时,星载双模四频接收机开机工作,可以采集指定时段的星载北斗/GPS观测数据,存入数据管理单元,待卫星过境时经星地链路下传至关口站,用于后续低轨导航增强试验验证,其工作原理如图5所示;当载荷处于导航增强模式时,增强信号发射分机在卫星经过试验地点上空前开机完成定位和授时,启动增强信号发射,对地发射Z1/Z2导航信号,其工作原理如图6所示;在不开展试验任务时,低轨导航增强载荷开启低功耗模式,该模式采用低功耗接收机工作,便于储存电能,为后续的增强信号发射做好准备。

图5 高精度观测模式工作原理图Fig.5 Schematic diagram of high-precision observation mode
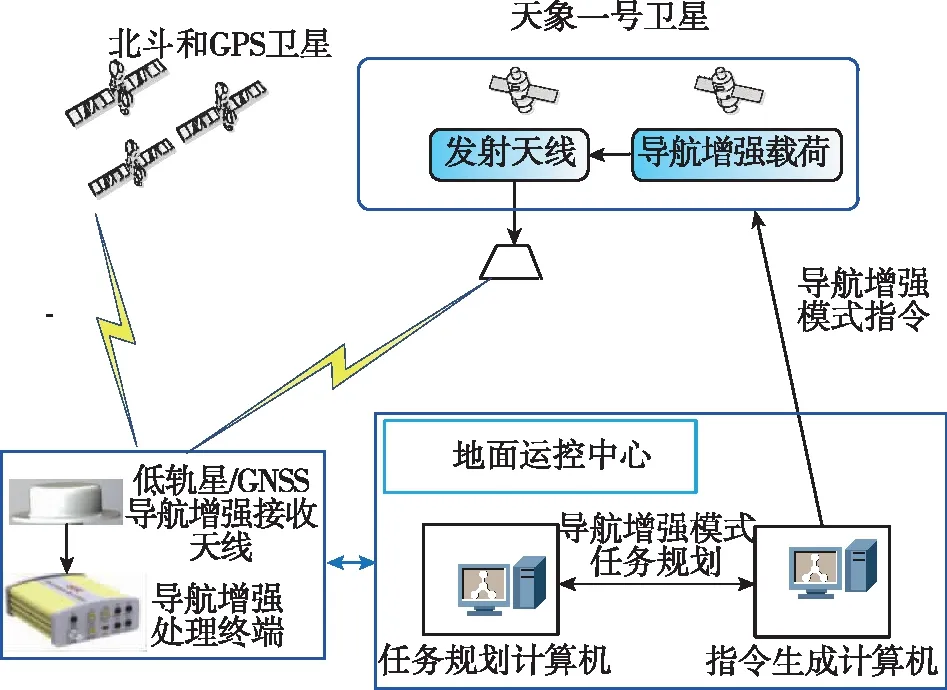
图6 导航增强模式工作原理图Fig.6 Schematic diagram of navigation augmentation mode
2.2 低轨导航增强系统信号体制
天象一号低轨导航增强信号的设计原则首先考虑了与现有GNSS兼容,即作为北斗星座的重要补充,增加可见星数量,并支持单星定位;另一方面,为了满足信息增强的任务需求,增强信号需要支持播发增强信息和完好性信息,以提升导航定位服务的精度和可用性。
基于上述信号设计原则,天象一号的下行导航信号采用2个异构的L频段信号Z1和Z2频点信号。其中,Z1频点信号主要播发天象一号卫星的电文信息,以及GNSS卫星的增强信息和慢变完好性信息;Z2频点信号主要播发快变完好性信息。两种信号均可重构,可根据任务规划更改播发内容。天象一号增强信号设计充分考虑了与现有GNSS信号的兼容与互操作性,并在此基础上,为低轨卫星各类多元化信息提供了可靠的物理层承载。
2.3 低轨导航增强系统信号体制
2.3.1 低轨卫星实时自主定轨
天象一号试验卫星的低轨导航增强载荷具备星上实时自主定轨功能,利用星载GNSS数据以及GNSS的广播星历完成实时轨道确定。天象一号自主实时定轨采用约化动力学法和几何法结合的方法确定卫星的位置与速度信息。该方法在动力学模型和几何观测信息间进行最优加权,并利用过程噪声参数吸收卫星动力学模型误差,获得卫星轨道的最优估计,具体算法如下:
1)引入经验加速度矢量;
2)假定经验加速度为一阶高斯-马尔可夫过程,利用过程噪声吸收动力学模型误差。
引入经验加速度矢量。卫星运动方程为

(1)
其中,(,,)为可用确定数学模型描述的加速度;()表示全体没有模型或错误模型的加速度。定轨系统假定()为一阶高斯-马尔可夫过程,即其由时间相关分量和纯随机分量组成

(2)
其中,为相关时间的倒数,是一个常量;()为高斯白噪声。
针对数字信号处理器(Digital Signal Proces-sor, DSP)的字长限制等因素带来的计算误差,实时自主定轨采取以下措施:
1)对状态估计误差协方差矩阵进行UD分解,采用UD分解滤波,在时间更新和量测更新中利用对和矩阵的更新代替传统扩展卡尔曼滤波(Extended Kalman Filter,EKF)算法中对矩阵的更新;
2)为避免传统EKF算法中求滤波增益运算中大型矩阵求逆的过程,采用观测矢量序贯处理的方法。
以上措施可以有效地吸收动力学模型误差,保证滤波计算过程中矩阵的正定性,维持滤波器的持续收敛。
GNSS信号中断后,无新的测量值参与星上的实时滤波,滤波器将使用预报的状态量继续进行滤波处理,并给出外推的轨道位置信息。
2.3.2 基于地面处理低轨导航增强时空基准建立
低轨导航增强系统可基于卫星的星载GNSS观测和地面监测接收机采集的GNSS观测数据开展星地一体化的联合精密定轨及时间同步处理,获取与GNSS时空基准统一的低轨卫星精密轨道和钟差信息。同时,计算GNSS的增强信息和完好性信息,为低轨导航增强应用服务及试验验证提供精准的空间段位置信息。
地面监测网络的台站坐标是空间基准的重要组成部分。利用低轨导航增强地面站、IGS台站观测数据联合网解,强加约束,生成地面站坐标和速度信息,将低轨导航增强地面台站坐标整体对齐到国际地球参考框架(International Terrestrial Reference Frame,ITRF),实现其坐标框架的维持与更新,为低轨导航增强地面部分的空间基准提供保障。
目前,天象一号低轨导航增强系统的时间基准基于星地一体化联合精密定轨和时间同步处理获取的卫星钟差,以及地面监测网络台站数据网解获取的测站钟差,实现系统时间与GNSS时间基准的同步。
2.4 低轨导航增强瞬时高精度定位
基于低轨卫星增强的全球高精度精密定位技术主要是充分发挥低轨卫星的高动态变化以改善星座的几何构型,从而达到快速收敛的高精度定位效果。目前,基于GNSS卫星的精密定位技术,卫星的轨道、钟差等产品精度已经能够满足分米级、厘米级的定位精度需求,但GNSS卫星都是中高轨卫星,对地面用户而言,GNSS卫星的几何构型变化缓慢,致使高精度定位无法实现快速收敛。完成全球高精度精密定位技术主要包含两部分内容:服务端高精度低轨卫星精密轨道与钟差产品的解算以及用户端低轨卫星增强的PPP算法研究。用户端低轨卫星增强PPP算法研究的关键在于对低轨卫星的误差模型进行合理建模,有效地消除低轨卫星的误差,并对其进行恰当约束,考虑电离层延迟、低轨卫星和北斗/GNSS卫星系统间的偏差、星座间观测量融合等因素,具体的计算流程如图7所示。

图7 低轨导航增强快速高精度定位算法Fig.7 LEO navigation augmentation fast and high-precision positioning algorithm
2.5 低轨导航增强监测评估
低轨星导航增强的核心能力是提供全球瞬时高精度服务。低轨导航增强监测评估系统主要对系统核心能力进行评估,将评估指标分解为星座状态、导航信号性能、导航信息性能和服务性能四大类,其中星座状态、导航信号性能、导航信息性能直接影响低轨星导航增强的服务性能,因此其服务性能的评估是低轨星导航增强性能评估的核心指标。在天象一号低轨导航增强系统在轨试验验证阶段,通过对特定时段特定区域的指标体系的监测评估,完成技术体制的验证和服务能力的初步评估,为低轨导航增强完好性监测评估系统的设计提供有力支撑。低轨导航增强监测评估指标体系如图8所示。

图8 低轨导航增强监测评估指标体系Fig.8 The indicator system of LEO navigation augmentation monitoring and evaluation system
3 天象一号低轨导航增强试验验证
3.1 实测数据质量分析
天象一号卫星低轨导航增强试验数据主要包括星载GNSS观测数据和低轨星下行导航信号两大类。为了验证天象一号低轨导航增强观测数据的测量精度,本节分别基于2019年6月8日采集的星载GNSS观测数据和2019年7月12日采集的下行导航观测数据统计其伪距多径误差。此外,对天象一号星上自主定轨的精度开展了在轨试验验证。
统计结果表明,天象一号试验卫星的星载GPS和BDS平均伪距多径分别为0.66m和0.63m,各频点的伪距多径如图9所示;天象一号卫星下行导航信号Z1和Z2的平均多径误差分别为0.77m和0.76m,GPS L1、L2和BDS B1、B2观测数据的平均多径误差分别为0.60m、0.30m和0.51m、0.46m,如图10所示。分析结果表明,天象一号下行导航信号的多径误差略大于GNSS,但在同一个数量级。在测量噪声方面,天象一号下行导航信号满足提供导航服务的基础要求。

图9 天象一号星载GPS/BDS数据伪距多径统计图Fig.9 Pseudorange multipath error statistics of Tianxiang-1 onboard GPS/BDS observation

图10 天象一号/GPS/BDS下行导航信号伪距多径统计图Fig.10 Pseudorange multipath error statistics of Tianxiang-1/GPS/BDS down-link navigation signals
基于天象一号卫星星载GPS L1/L2双频伪距和多普勒观测数据开展星上实时定轨处理,以PPP事后处理结果为参考,统计星上实时定轨精度,结果表明,天象一号星上实时定轨三维位置精度为0.84 m,速度精度为0.0009 m/s(如图11所示)。
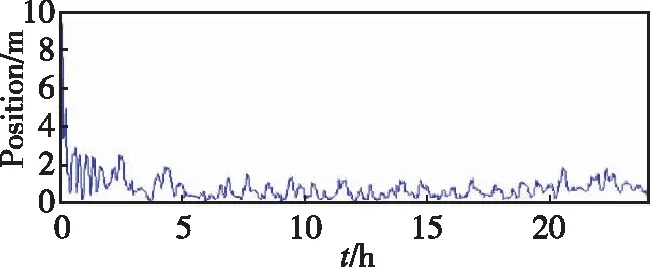
(a)天象一号卫星自主实时双频定轨(位置)
3.2 仿真试验验证
由于天象一号试验卫星仅包含2颗卫星,地面监测站可视时段有限,因此基于仿真数据开展低轨导航增强快速高精度定位试验验证。本文基于144颗低轨卫星星座开展数据仿真,获取了2h时长的观测数据,具体仿真策略如表2所示。

表2 低轨卫星数据仿真策略表
基于以上仿真数据,分别开展了动态和静态精密定位试验。试验结果表明,低轨卫星下行观测数据的加入能够有效缩短PPP的收敛时间,在一定程
度上提高了定位精度。基于GPS、BDS和低轨卫星观测数据的动态和静态定位收敛时间为1.33min,收敛后的位置精度分别为1.95cm和1.12cm,具体收敛统计结果如表3和表4所示。以仅使用GPS数据为例,对比了加入低轨卫星后的收敛性能提升情况,试验结果表明,动态PPP的收敛时间可由7.5min缩短至1min,静态PPP的收敛时间可由4.5min缩短至1.33min,其定位精度及收敛情况如图12和图13所示。

表3 动态定位收敛统计表
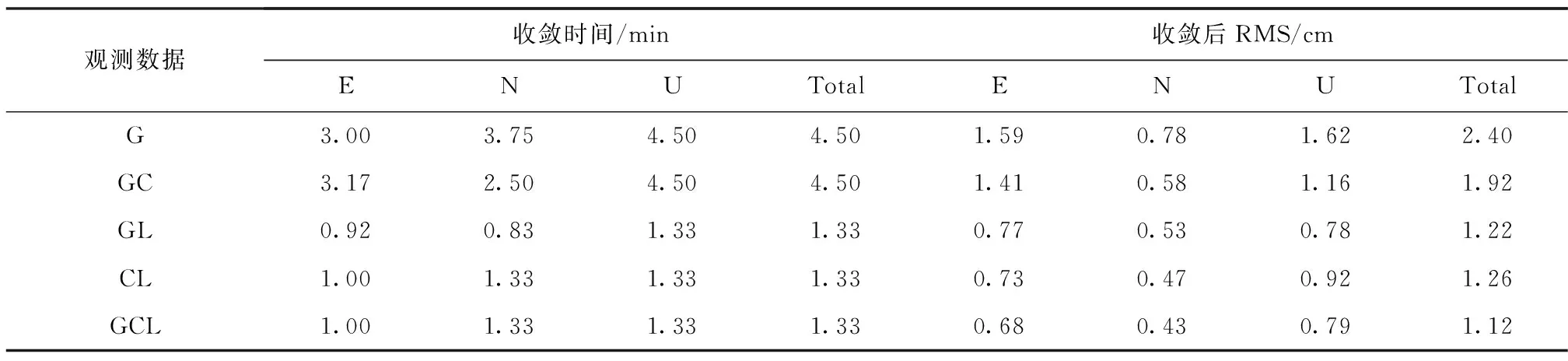
表4 静态定位收敛统计表
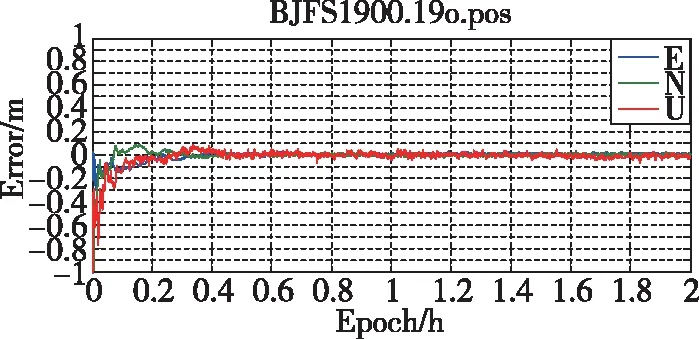
(a) GPS PPP

(a) GPS PPP
4 结论
本文针对低轨导航增强系统全球瞬时高精度服务的需求,阐述了天象一号低轨导航增强系统的技术体制和关键技术,并开展了在轨试验验证和仿真验证分析,试验结果表明:
1)天象一号低轨导航增强系统采用星上+地面处理的技术体制,兼具导航信息增强和信号增强的功能,为用户提供瞬时高精度定位所需的精密产品和改正信息。
2)实测数据分析结果表明,天象一号下行导航信号的多径误差略大于GNSS,但在同一个数量级;在测量噪声方面,天象一号下行导航信号满足提供导航服务的基本要求。
3)天象一号卫星基于双频星载GNSS数据的星上实时定轨处理,可实现亚米级的定轨精度,为星上空间基准的快速建立提供了有效的技术支持。
4)仿真试验结果表明,低轨卫星下行导航信号可有效缩短高精度定位的收敛时间,并在一定程度上提高定位精度,可实现在1min左右收敛至厘米级的高精度定位性能。
猜你喜欢
科学家(2022年3期)2022-04-11
科学与财富(2021年34期)2021-05-10
创新作文(3-4年级)(2019年12期)2019-12-17
文萃报·周二版(2019年37期)2019-09-10
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
回族文学(2017年3期)2017-05-31
健康女性(2017年3期)2017-04-27
儿童故事画报(2016年5期)2017-02-07
都市丽人(2016年12期)2016-12-14
