
一种单低轨星北斗备份与辅助方法及在轨验证
2022-02-18 03:22张爽娜薛伟罗晨
导航定位与授时 2022年1期
张爽娜,马 跃,刘 骁,薛伟罗晨,王 盾
(航天恒星科技有限公司, 北京 100095)
0 引言
全球卫星导航系统(Global Navigation Satelli-te System,GNSS)信号较微弱,当用户处于恶劣电磁环境时,容易受到干扰而无法定位。针对GNSS的脆弱性问题,美国最先提出了综合定位、导航和授时(Positioning,Navigation,and Timing,PNT)体系,旨在通过多种导航手段实现可用性或高可靠性的导航服务。而利用低轨卫星平台实现导航功能或辅助导航性能提升是综合PNT体系的组成部分,在当前大热的全球低轨互联网星座上实现导航功能成为了低轨发展新热点。
针对GNSS脆弱性问题,较为成熟的处理方法包括惯性组合导航技术、视觉等匹配类导航手段辅助技术等。然而,惯性器件的误差累积问题以及视觉等匹配类导航的先验信息采集问题使得导航性能不能满足大众需求。而低轨卫星凭借其功率高、多普勒变化快等特点,一方面可以通过高功率的测距信号实现导航;另一方面可以有效提升GNSS的灵敏度,从而改善恶劣电磁环境下的GNSS不可用问题。
众多研究机构进行了利用低轨卫星实现导航增强的研究探索及实验,以美国铱星卫星时间和位置(Satellite Time and Location, STL)服务为代表的低轨星座导航备份系统已经提供服务。STL服务通过在高功率的寻呼信道发射STL专用信号提供独立导航服务。STL白皮书对外公布的精度为50m,但铱星STL信号需要地面精确时间信息辅助才能实现定位精度。
2018年1月,天仪研究院自主研制的“双子星”搭载导航增强载荷,但未公开其导航增强功能性能验证结果。
2018年6月,武汉大学牵头研制的“珞珈一号”卫星进行了高精度导航增强验证,其伪距测量精度可达1.5m,载波相位测量精度可达1.7mm,验证了低轨星对缩短高精度定位收敛时间的作用。
2018年12月,航天科技集团“鸿雁”完成首星发射。作为覆盖全球的低轨卫星通信系统,鸿雁在提供通信与数据传输业务的同时,具备增强导航定位功能,但未公开其导航增强功能性能验证结果。
2019年6月,中电天地一体化信息网络重大项目“天象”试验1星、2星(又名中电网通一号A星、B星)通过搭载发射。在导航方面旨在提升北斗导航增强以及广域高精度无人驾驶导航定位能力,但未公开其导航增强功能性能验证结果。
中国科学院微小卫星创新研究院(葵花卫星),通过与高校合作论证低轨导航增强技术,并计划进一步在自动驾驶等民用领域进行应用。
在国内众多低轨导航增强的实验研究中,缩短高精度定位收敛时间得到了广泛验证。与高精度定位快速收敛的目的不同,本文设计了一种基于单颗低轨星实现北斗备份与辅助的导航方法,将低轨卫星独立定位与辅助北斗系统实现灵敏度提升两种方法进行融合设计(如图1),旨在提升恶劣环境下的导航可用性等。伴随着2021年4月星网公司在雄安落地,巨型低轨星座的加紧部署,可用低轨卫星数量将迎来井喷式增长,复合导航方法的服务性能也将得到进一步提升,将有望解决在城市峡谷、沟壑等恶劣电磁环境下的导航服务不可用问题。

图1 单低轨星北斗备份与辅助融合系统组成Fig.1 Beidou backup and assistance navigation system configuration
1 低轨北斗备份与辅助融合导航原理
由于低轨卫星多普勒变化迅速,可以在短时间内完成多次单颗卫星导航信号的接收,即能独立确定概要位置及时间。利用该初始化信息,通过低轨卫星的强功率信号转发北斗卫星信息,实现辅助北斗接收,在不牺牲捕获时间的前提下,提升了北斗信号的捕获及跟踪灵敏度,达到恶劣电磁环境下的导航性能提升。
基于单颗低轨卫星的北斗备份与辅助融合导航(无地面辅助)主要分为2个过程:
1)单颗低轨卫星独立定位,利用低轨卫星落地功率电平高、多普勒变化快的特点,主要解决恶劣电磁环境下的导航可用性问题,冷启动5min以内,实现1km以内的粗略定位。
2)辅助北斗系统灵敏度提升,利用单星定位的粗略定位结果和转发低轨星上自主获取的北斗卫星星历信息,主要解决恶劣电磁环境下的短时间内导航精度和授时精度提升问题,单星定位后1min内,可实现优于50m的精确定位。
北斗备份与辅助融合导航终端有三种工作模式,包括无低轨星过境时的北斗模式、有低轨星过境时的独立定位模式和辅助北斗模式,三种模式可根据收星情况自主切换。北斗备份与辅助融合导航终端模式切换过程如图2所示。

图2 北斗备份与辅助融合导航终端模式切换过程Fig.2 Beidou backup and assistance receiver modes switch flow
2 单星独立定位性能理论分析及仿真
单星独立定位技术是通过被动接收单颗卫星信号完成对自身位置确定的技术。结合卫星运动的特点,单星定位算法的系统示意图如图3所示,当卫星飞过地面用户上空时,用户通过自身携带的接收机天线完成对卫星发射信号的多次采集,通过联合解算完成对地面用户位置的确定。

图3 单低轨星2次测量示意图Fig.3 Schematic diagram of two measurements of a single LEO satellite
卫星在飞行过程中,地面用户与卫星之间的距离在不断发生变化,而这个距离的变化直接影响信号到达地面用户的时间延迟。基于该原理,通过对一段时间内接收到的卫星信号的时间进行分析,提取与卫星位置相关的高阶观测量,建立分析算法的数学模型。
在完成定位授时之前,星地时间不同步且星地钟差未知,可知终端接收到信号后,用终端地面时间生成电文同步头,对接收信号进行搜索,通过时频域的搜索可精确获得接收信号中同步头的对应时间和此时的星地多普勒频移。
与经典的双星时频差定位理论类似,同一颗卫星不同时间得到2个不同的位置(速度),可以获得2次观测的伪距和多普勒,通过相减可以得到径向距离差和速度差的方程,从而完成用户位置解算。
径向距离差方程
()-()=

(1)
径向速度差方程(多普勒)


(2)
联立方程式(1)、式(2)及地球球面方程()=0,可获得最终求解的方程组。

假设各误差项均为符合零均值高斯分布的随机变量。方程组中未设置地面终端速度变量,本算法仅利用单星进行定位,只能用于静态/准静态场景。解算时需要提供概略水平位置(误差200km以内),以剔除双星时频差定位理论中的模糊点。
在单颗卫星观测及位置解算过程中,多普勒频率的测量精度以及时间精度决定了用户的最终定位误差。众所周知,接收机可以通过延长信号观测时间并改进估计算法不断提升频率测量精度;然而,低轨卫星过境持续时间较短,并且无法无限延长信号观测时间,频率测量的无偏估计精度存在误差下界,即可达到的最小误差方差可由克拉美罗界(Cramer-Rao Lower Bound, CRLB)表示。
考虑满足奈奎斯特采样准则,即采样频率要高于克拉美罗界。由克拉美罗方程组可知,随着信号样本个数的增大以及信噪比的提高,对于信号频率的估计误差下界越低。即在满足奈奎斯特采样定理的前提下,接收信号的时间长度越长,频率估计越精确;相应的信号载噪比越高,频率估计误差越小。
为了验证上述推理,本课题针对满足奈奎斯特采样准则情况下的不同信号进行频率估计仿真实验,信号的载噪比范围设置为40dB·Hz~80dB·Hz,时间非连续信号的持续时间分别设置为10ms、20ms、40ms和80ms,其频率估计误差如图4所示。

图4 不同信号的频率无偏估计误差下界Fig.4 Lower bound of unbiased frequency estimation
通常,利用单颗卫星多普勒测量值进行位置解算的频率精度需要达到1Hz量级。根据仿真结果可以看到,信号持续时间超过40ms时,在40dB·Hz即可满足测量精度;当数据长度为20ms时,载噪比要达到46dB·Hz以上;而数据长度为10ms时,载噪比要高于55 dB·Hz才能达到单星多普勒1Hz的测量精度。
3 低轨辅助北斗导航理论分析及仿真
通过延长相干积分时间获得灵敏度的提升是目前常用的方法,然而在没有辅助信息的情况下,长时间相干积分搜索单元数目庞大,导致时间开销较大。通过低轨星独立定位获得的粗略位置及时间,可以得到不包含卫星运动带来的多普勒频移信息,从而缩短北斗卫星搜索时间。这使得地面终端在不增加较多时间的前提下,进一步提升捕获灵敏度,从而改善恶劣电磁环境下的接收性能。由低轨星单星定位获得的粗略位置以及时间不确定度,可以减小捕获过程中的码片搜索范围。
根据低轨星信号伪距测量精度及多普勒测量精度结合克拉美罗界估算可知,单星定位位置误差约为2km。以轨道高度为21528km、速度为3779m/s的卫星为例,根据式(3)计算得到单星定位误差引起的最大多普勒频移误差为1.84Hz。而根据式(4)计算得到,一般接收机晶振稳定度1.5×10对载波产生的频率误差为±2363.1Hz。对比可知,影响频率搜索范围的主要因素是时间因素。

(3)
Δ=*
(4)
码片搜索范围可以缩减到由单星定位误差引起的码相位偏差。以北斗B1c信号为例,当单星定位位置精度为2km,接收机位置误差可将码片搜索范围限制在±2×103÷300≈±7码片内,码片搜索范围缩减为14码片。
如图5所示,在相同的信号带宽下,灵敏度随着相干积分时间的增加而提升。相干积分为1ms时,增益为33dB;相干积分为64ms时,增益为51dB。通常,通过牺牲硬件资源及时间开销实现北斗信号接收积分时间的增加,在单颗低轨卫星的辅助下,有效减少硬件资源及时间开销,从而改善使用体验。
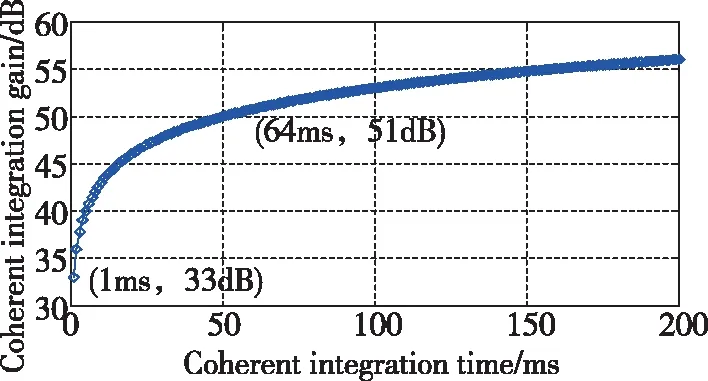
图5 相干积分时间与增益变化关系图Fig.5 Simulation diagram of gain changing with coherent integration time
=10lg()
(5)
针对有低轨星辅助信息及无低轨星辅助信息两种情况下的北斗捕获能量输出值进行统计,结果如图6所示。

(a) 无低轨星辅助
根据仿真测试结果可知,单颗低轨卫星定位的授时精度小于10μs,码搜索步长为0.5chip,可利用式(6)得到码搜索单元数量。与无辅助时的搜索单元数量进行对比如表1所示。

表1 有无低轨星辅助时码搜索单元数量对比

(6)
从表1中可见,低轨星辅助模式下搜索单元数减少约99%。
根据仿真测试结果可知,利用低轨卫星转发的北斗导航卫星信息与单星定位结果估计的导航卫星多普勒最大误差约±50Hz,可利用式(7)得到频率搜索单元数量。与无低轨星辅助时的频率搜索单元数量进行对比如表2所示。

表2 有无低轨星辅助时频率搜索单元数量对比

(7)
从表2中可见,低轨星辅助模式下搜索单元数与相干积分时间相关,数量有一定的减少。
4 在轨测试验证
2020年9月~12月期间,对搭载北斗备份辅助融合导航信号播发载荷的多功能低轨卫星进行了性能测试验证。
4.1 设备概况
多功能卫星上搭载的设备包括北斗备份辅助融合导航信号播发载荷和发射天线,其实际安装情况如图7所示。

图7 北斗备份辅助融合导航信号播发载荷及 发射天线安装情况Fig.7 LEO Beidou backup and assistance payload and the installation of transmitting antenna
地面测试验证设备包括北斗备份辅助融合导航接收终端及通用测试设备。测试现场及终端实物如图8和图9所示。

图8 测试现场情况Fig.8 LEO Beidou backup and assistance test environment

图9 终端用户界面Fig.9 LEO Beidou backup and assistance receiver test software
4.2 测试结果
2020年11月14日,针对单颗低轨卫星的复合导航测试结果如下。
4.2.1 单星独立定位结果
北斗/低轨复合导航终端开机43s,实现低轨星捕获跟踪;开机63s,完成单星首次定位,定位误差31.9km;开机103s,启动大间隔数据处理;开机253s,定位精度收敛至2km以下;开机295s,定位精度达到703.58m。其定位结果曲线如图10所示,收敛过程的经纬度坐标随时间变化情况如图11所示。

图10 单星独立定位误差随时间变化情况Fig.10 Positioning errors with a single LEO satellite
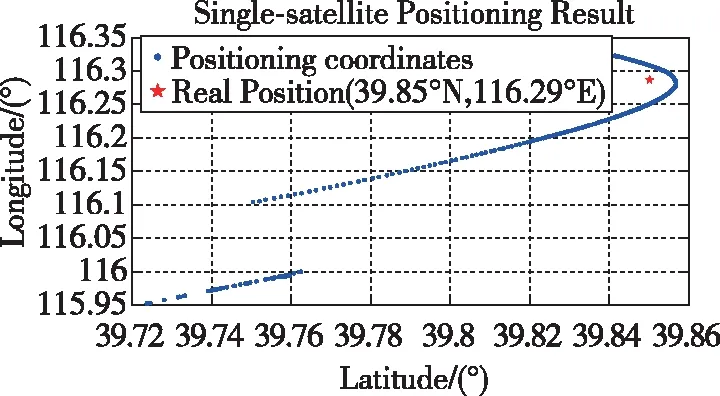
图11 单星独立定位经纬度收敛过程图Fig.11 Convergence process of latitude and longitude
4.2.2 辅助北斗性能提升
为测试低轨星对北斗辅助性能提升效果,进行了对比实验。首先测试了北斗卫星正常收星情况,未加噪声情况下,终端捕获北斗卫星9颗。
在接收端加宽带高斯白噪声-51dBm,低轨星尚未过境时,9颗北斗卫星全部失锁;低轨星过境后,捕获北斗卫星5颗,成功定位,定位精度优于50m。从图12和图13的接收机数据可见,低轨辅助后捕获的北斗卫星中最低载噪比为23dB,对应干信比约42dBc,实现定位精度小于50m。

图12 低轨卫星尚未过境北斗卫星接收数据 (宽带高斯白噪声-51dBm)Fig.12 Test data of Beidou receiver without LEO satellite transiting(Gaussian white noise -51dBm)

图13 低轨卫星过境北斗卫星接收数据 (宽带高斯白噪声-51dBm)Fig.13 Test data of Beidou receiver with LEO satellite transiting(Gaussian white noise -51dBm)
以北斗30号卫星接收通道输出为例,对低轨卫星辅助效果进行评估。如图14所示,红色曲线代表信号能量值,蓝色曲线代表噪声能量值。200s开始在接收端引入加性高斯白噪声,能量为-51dBm。从图14中可知,在370s处,低轨星入境辅助成功,实现了对该卫星的捕获跟踪。

图14 接收机检测北斗30号卫星信号能量及噪声能量Fig.14 Signal power and noise power of Beidou PRN 30
5 结论
本文针对恶劣电磁环境下的北斗不可用问题,提出了一种基于低轨卫星的北斗备份与辅助融合方案。在轨实测结果表明:
1)将低轨卫星单星独立定位与辅助北斗灵敏度提升融合应用结合理论分析,为未来应用提供了技术验证。
2)将低轨卫星多普勒及伪距测量值联合应用实现单星定位,其定位精度主要取决于多普勒测量精度及时间精度。
3)利用低轨卫星为北斗卫星提供星历信息及初始位置辅助,实现了在时间及资源开销增加较少情况下的高灵敏度北斗信号接收,是解决恶劣电磁环境下的北斗可用性提升的有效手段。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
卫星应用(2022年3期)2022-05-23
电脑爱好者(2021年18期)2021-09-23
大众科学(2020年8期)2020-11-02
计算机世界(2020年26期)2020-07-23
环球时报(2020-03-10)2020-03-10
电脑知识与技术·经验技巧(2020年9期)2020-01-16
电脑爱好者(2019年8期)2019-10-30
四川党的建设(2018年20期)2018-11-02
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
