
基于电子技术的主动式传感器物联网控制系统设计
2022-02-17 12:11郑子超李永红岳凤英李玲
电子设计工程 2022年3期
郑子超,李永红,岳凤英,李玲
(中北大学,山西太原 030051)
由于布线困难、结构复杂等原因,传统的有线测控系统往往不能满足各种长短期环境监测应用的需要[1]。作为一种新的信息采集和处理技术,无线传感器网络越来越多地应用于各个领域[2]。但人员和大型设备常常难以到达危险且紧急情况的地点[3],且无线传感器网络中的传统节点不能进行现场组网,使得环境信息采集任务难以完成。使用ZigBee 主动式传感器物联网控制系统,既能保证数据的完整性,又能接入多个端口,可广泛应用于物联网;使用基于TrueTime的主动式传感器物联网控制系统,采用Matlab/Simulink 联合仿真工具,可以研究网络传输延迟对控制性能的影响,也可以用动态调度方法进行实验研究。然而,这两种方法都存在问题。无线传感器网络是动态的,节点是静态的,传感器节点部署好之后,它们就静止了。由于数据汇聚,基站常常被固定下来。传感器节点与基站之间缺乏一定的灵活性,因此无法根据监测对象的变化动态地调整节点的区域分布,也就无法保证系统的控制精度。为此,提出了基于电子技术的主动式传感器物联网控制系统,使用电子技术利用移动节点可控制主动式传感器物联网。
1 系统硬件结构设计
物联网分为感知层、传输层和应用层,传输层为物联网网络控制器。感知层主要由传感器网络和数据采集设备组成,具有探测和短程通信功能[4-6]。传感网络由各种数据采集装置、传感器设备节点等组成,各种传感器模块构成数据采集装置;传输层实现了远程通信和网络调节[7-9]。应用层采集的数据在以太网的基础上实现了远程传输,并且实现了与以太网的结合[10-12]。该层根据处理过的数据和信息为用户提供应用和服务,对各种通信设备的信息进行处理和控制[13]。
系统硬件结构设计如图1 所示。
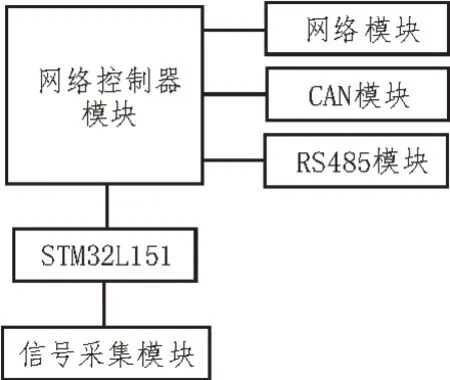
图1 系统硬件结构
1.1 协调器模块
协调器模块包含的部件有CC2530 芯片、I/O 连接器以及电源装置。系统终端将数据传输至协调器中,协调器对其进行处理,并通过串口向主机发送处理数据[14]。该芯片的运行电压为2~3.5 V,输出功率的绝对值为4.5 dBm,具有8个ADC信道,每个信道的分辨率为13位。片中RAM 为6 kB,包括了系统内部模块的通信栈[15]。FLASH 芯片大小为256 kB。其中有多个用于传输的端口,支持并行传输工作。调整器安装了复位装置,用于防止芯片的电压过高导致其损坏的现象。
1.2 通信协议栈
所设计的系统需要建立与物联网的通信协议堆叠,以此实现控制信号的传输,具体结构如图2所示。
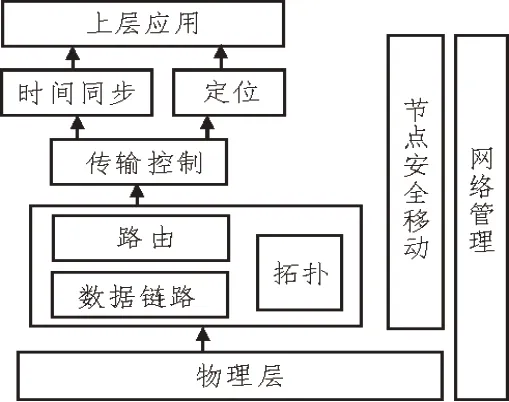
图2 通信协议栈
由图2 可知,芯片接收各传感器数据,实现对终端模块的检测。依据数据的分析结果,输出指令。构建通信协议栈,连接CC2530 芯片与电平转换芯片RS232,并将电压控制为工作额定电压[16]。协调器打包处理过的数据与I/O 接口连接,以1~6 Mb/s的波特率实现PC 终端与协调器模块的通信。USB 串口通信参数设置为8 位,以保证系统的通信功能正常。
1.3 外围扩展模块
在外围扩展模块电路中,网络模块采用DM9000AEP芯片,传输协议为802.3。选择LC5740的5G 模块来实现5G 网络功能,完成与监控系统的数据交互。计算机辅助设计模块和处理器之间是SPI 接口。使用MCP2515 芯片和SN65HVD230D 分别实现了从SPI格式到CAN 总线格式的数据转换。RS485 与处理器的接口是UART 接口,使用SN65HVD11D 芯片实现UART 接口到RS485 总线级的转换。除ARM 核心处理器和扩展模块外,还应配置外围扩展模块,保证系统能够正常工作。外围扩展模块如图3所示。

图3 外围扩展模块
1.4 无线移动节点结构设置
无线移动节点结构如图4 所示。
由图4 可知,无线移动节点结构由电源模块、传感器单元、通信处理单元和执行机构单元组成。其中传感器单元包括温度、光照和加速度传感器元件,用来收集现场环境数据。通信处理单元的数据通过接口传送,由主控单片机处理存储。执行机构单元的主单片机根据基站发送的指令将采集到的数据发送给基站,也可请求协单片机完成相应的任务。该结构清晰,层次明确,维护方便,可适应各种环境监测场合。
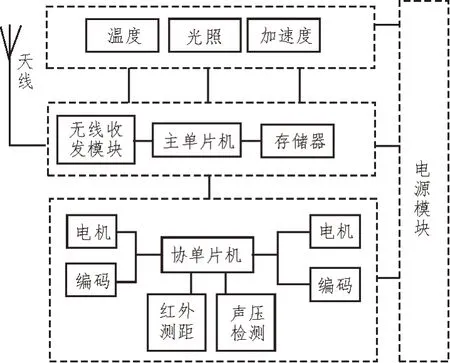
图4 无线移动节点结构
1.5 控制环结构
主动式传感器与控制器、控制器与执行机构之间采用无线连接的方式,构成了物联网控制环结构,如图5 所示。

图5 控制环结构
由图5 可知,控制节点和执行/传感节点分别是电子技术内核模块和电子技术电池模块。定期通过无线网络将采集过程中传感器节点的数据发送给控制器节点。控制节点可以是事件驱动的,也可以是时间驱动的,计算系统的反应时间,并将结果返回给事件驱动或时间驱动的执行器节点,控制信号传输速度。
2 系统软件部分设计
物联网控制系统的软件是以硬件为基础,实现不同通信协议的转换以及数据采集终端与监控中心的连接。借助电子技术中的模拟技术,确定模糊规则,以实现所有程序的统一管理。
2.1 基于模拟电子技术的模糊规则设计
依据主动式传感器物联网规则,使用电子技术中的模拟电子技术,输出模糊规则,并将规则数据库的输入数据模糊化,以此产生模糊规则矩阵:
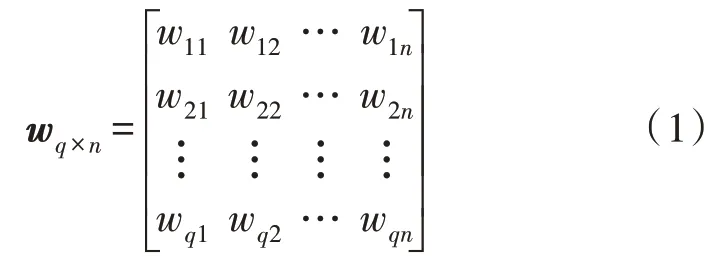
式(1)中,wq×n表示模糊规则实施前矩阵;wqn表示规则模糊数,q为模糊规则的数量,规则库中的系数矩阵计算公式如下所示:
式(2)中,Kqn表示矩阵生成的规则系数。若模糊化输入向量,则会产生判定向量e,根据式(3)计算向量的隶属度,以此决定是否对其进行控制。
若需要对其进行控制,则依据隶属度大小,通过向对应的传感器传输工作指令,对其进行控制。
2.2 控制流程设计
软件部分由主功能部分开始,完成变量的定义和初始化,然后各子模块完成相应的功能,使主功能进入无限循环,控制流程如图6 所示。
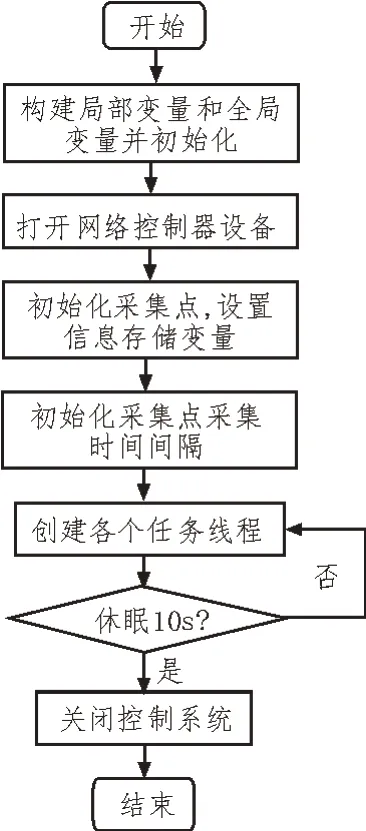
图6 控制流程设计
由图6 可知,首先打开和初始化各个通信装置。在初始化之后,等待服务器发送一个命令。当命令出现时,读取命令代码和命令长度,根据命令的长度来接收命令内容,然后再判断命令处理线程是否需要处理命令,直到处理成功。
3 实 验
3.1 实验网络拓扑结构设计
将实验网络拓扑结构分为3 个层次,分别是感知层、传送层和应用层。感知层具备检测功能,主要负责采集数据。物联网控制系统通常在传送层工作,具备远程通信及网络调节功能。应用层需根据处理的数据为用户提供服务,处理多种通信设备信息。
3.2 实验步骤
使用lntelCorei7-9700K型号的CPU,其具有3.6 GHz内存,能够高效处理指令,用500 GB 硬盘存储实验。利用64 GB 硬盘,暂存实验过程数据和结果数据。在NVIDIA RTX 2060 显卡中,通过驱动显示界面,使用Windows8.1 操作系统,能够辅助系统实现相关操作。
3.3 实验结果与分析
分别使用基于ZigBee的主动式传感器物联网控制系统、基于TrueTime的主动式传感器物联网控制系统和基于电子技术控制系统,对比分析系统的反应时间,如图7 所示。

图7 3种系统反应时间对比分析
使用基于ZigBee 主动式传感器物联网控制系统最长反应时间为2.7 s,使用基于TrueTime 主动式传感器物联网控制系统最长反应时间为2.4 s,使用基于电子技术控制系统最长反应时间为0.6 s,由此可知,使用基于电子技术控制系统反应时间较短,能够快速作出反应。
使用3 种系统,对比分析电压控制效果,如图8所示。

图8 3种系统电压控制效果对比分析
由图8 可知,使用基于ZigBee 主动式传感器物联网控制系统超调量大,输出电压在0.75~1.50 V 范围内变化;使用基于TrueTime 主动式传感器物联网控制系统反应时间长,输出电压在0.75~1.25 V 范围内变化;使用基于电子技术控制系统,超调量小,输出电压在0.95~1.05 V 范围内变化,与实际的1.0 V 电压相差最小。由此可知,使用基于电子技术控制系统电压控制结果较为精准。
4 结束语
设计的基于电子技术的主动式传感器物联网控制系统,实现了主动式传感器物联网不同数据间的交互与传输,通过实验证实了该系统经过模糊处理后,控制效果更精准,同时也证实了该系统具有良好的性能。随着网络规模的不断扩大,利用该系统高效获取物联网拓扑结构中的数据,能够为数据稳定、快速传输奠定基础。
猜你喜欢
环球时报(2022-09-29)2022-09-29
党的生活(黑龙江)(2022年4期)2022-04-25
现代电子技术(2022年8期)2022-04-13
现代电子技术(2022年4期)2022-02-21
发明与创新(2021年17期)2021-07-05
科学与财富(2021年33期)2021-05-10
军民两用技术与产品(2021年12期)2021-03-09
电子制作(2019年13期)2020-01-14
汽车零部件(2018年5期)2018-06-13
建材发展导向(2014年2期)2014-05-04
