
基于三域特征提取和WOA-ELM 的滚动轴承故障诊断
2022-02-14 06:32耿建平陈志炜
桂林电子科技大学学报 2022年6期
耿建平,陈志炜
(桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004)
旋转机械是支撑国民经济平稳发展的动力,若发生故障,将会造成严重的经济损失。滚动轴承是大型机械设备的重要组成部件,对于机械设备的安全运转极为重要[1],因此亟需研究有效、可靠的轴承故障诊断方法。
针对滚动轴承早期故障呈现非线性、非平稳等特点[2],国内外学者在滚动轴承的特征提取、诊断模型方面不断地进行探索性研究。覃爱淞等[3]利用时域分析方法,将提取的原始振动信号中的无量纲指标作为特征向量,输入极限学习机(ELM)网络进行训练与测试,改善了信号处理后局部特征丢失的缺陷。解晓婷等[4]对样本中的振动信号进行快速傅里叶变换(FFT),提取频谱中的均方根特征值,利用改进型支持向量机(CS-SVM)建立诊断模型,有效提高了分类器的诊断精度。孙晓涛等[5]提取信号中的小波包能量,结合RBF神经网络实现故障分类,能较准确地提取信号时频域特征。以上方法在轴承故障诊断中均取得了良好的效果,但仍存在一些问题,如时域分析方法虽然能有效保留原始信号的特征,但对非平稳信号不敏感;FFT只适用于平稳信号的分析,且难以同时体现时频两域的全貌和局部特征;单纯的小波包不能很好地反映振动信号中能量复杂程度[6],对滚动轴承的早期故障不敏感。适当的特征融合可以更加全面地表征滚动轴承的不同故障,因此,结合时域、频域、时频域特征信息,构建特征向量集,以解决特征提取不充分的问题。
人工神经网络作为一种有效的数据驱动建模方法,在轴承故障诊断中有很好的应用价值。吕楠等[7]采用小波分析提取信号特征,结合反向传播(BP)神经网络,实现了对轴承状态的分析和故障诊断。文献[8]利用离散小波变换处理振动信号,将提取的时域特征输入SVM 分类器,用于识别轴承不同故障。可靠的诊断模型是提高诊断准确率的关键,但BP神经网络在结构上无法避免收敛速度慢且易陷入局部最优的问题,SVM 需要消耗大量的时间来对网络参数进行调整和训练,且难以处理多分类问题[9]。由于ELM 输入连接权值和隐含层阈值的随机产生,避免了参数的设置及迭代计算,具有模型结构简易、泛化性好、收敛速度快等优点[10]。Liang等[11]以极限学习机为识别模型,先利用集成局部特征尺度分解,获得原始信号的固有尺度分量,再计算本征尺度分量的时域指数、能量、相对熵,最后基于距离评价方法提取灵敏度特征,通过输入极限学习机进行故障类型识别。实验结果表明,该方法诊断性能优于SVM 和BP方法。
综上,针对轴承故障特征提取不充分和极限学习机网络性能不稳定等问题,提出一种基于三域特征提取和鲸鱼算法优化极限学习机(WOA-ELM)的滚动轴承故障诊断方法。
1 多域特征提取与降维
有效的特征提取是提高轴承故障诊断精度的必要前提,而采用单一的时域或频域方法不能全面反映轴承的性能退化信息,不利于对早期故障做出判断[12]。合适的特征融合能更好地处理振动信号的非线性和非平稳性,保留信号局部信息。
1.1 时域特征
时域分析是时域特征提取的常用方法,通过监测振动信号时域指标的变化检测轴承故障,能较好地提取原始信号的特征[13]。
时域特征包含的指标较多,包括有量纲与无量纲指标。有量纲指标易受外界因素影响,难以稳定表征轴承故障信息,因此选取无量纲指标作为时域特征。选取脉冲因子、峰值因子、峭度因子、裕度因子和波形因子,构建5维特征向量。无量纲特征指标及其表达式如表1所示。

表1 无量纲特征指标及其表达式
1.2 频域特征
频域分析是处理振动信号的常用手段。相对于时域分析,频域分析能更容易地识别和分离信号有用的频段,从而更充分地提取特征[14]。
FFT是在离散傅里叶变换(DET)基础上改进的快速算法,用于解决DET因计算量大导致计算困难的问题。FFT将时域信号转换为更加直观的频域信号,广泛应用于轴承故障诊断领域,对频域分析具有重要作用[15]。傅里叶变换的振幅谱和能量谱表达式分别为

采用FFT提取振动信号的频谱构造频域特征,不同故障的FFT频谱图如图1所示。
从图1可看出,轴承发生不同故障时,其振动幅度与波形也有所变化。均值频率和频率散度作为常用的频域特征参数,对振动信号中主频带偏移程度和频谱分布情况足够敏感。均值频率、频率散度的表达式分别为

图1 轴承不同状态的FFT频谱图

提取均值频率、频率散度,构成信号的频域特征向量。
1.3 时频域特征
相比小波变换,小波包变换有效解决了小波变换时频分辨率在高低频分布不均匀的局限性[16]。小波包变换既能分解信号的低频部分,也能处理信号的高频成分,从而提高了信号的时频分辨率,在时频域分析中具有很好的效果[17]。三层小波包分解的树形结构图如图2所示。

图2 三层小波包分解图
利用小波包变换提取各频段的能量,将其作为特征信息,选取“Shannon”熵类型和Db3母小波,对信号进行3层小波包分解,得到8个子频带的小波包能量百分比,如图3所示。
从图3可看出,在不同状态下采集的信号经过小波包分解后,子频带能量百分比有所不同,如发生内圈损伤时,小波包分解中的1、2、3、4子频带的百分占比差异较大,故选取1、2、3、4子频带的能量作为时频域特征向量。

图3 轴承不同状态的小波包频带能量占比
综上,将时域、频域、时频域特征相结合,构建混合域特征集,作为分类模型的输入。此外,为避免特征指标之间数值相差较大,需对混合特征域进行归一化处理。
1.4 局部保留投影
局部保留投影作为流形学习中的一种无监督特征提取算法,可在简约维度的同时保持样本原有的分布距离和局部拓扑结构[18]。结合三域特征信息构建的高维混合域特征集,一定程度上包含了冗余特征信息。因此需要一个非线性变换投影矩阵W,将n个高维样本X={x1,x2,…,xn}映射到一个低维空间,得到一组向量矩阵Y={y1,y2,…,yn},非线性变换公式为

其中,投影矩阵W可通过对目标函数的极小化求得。LPP的目标函数定义为

其中,Sij为权值矩阵S中第i行、j列的权值。
给定约束条件函数YTDY=1,将其代入式(3),可得WTXDXTW=1,对矩阵W求一阶偏导,可得最优化条件:

其中,λ为大于0的常量。
2 基本原理
2.1 鲸鱼优化算法
鲸鱼优化算法于2016年被提出,广泛应用于人工智能领域。鲸鱼优化算法相比粒子群算法、蚁群算法等经典算法,具有操作简单,调整参数少等优点[19]。
在算法中,设定当前距离猎物的最近位置为最优解,其他个体在更新自身位置的同时,向最优解靠近,此过程为收缩包围。位置变化方程如下:
其中:X(t)为鲸鱼个体当前位置向量;X*(t)为当前个体最优解;r1、r2为区间(0,1)的随机数;a的值从2到0线性下降;t为算法当前迭代次数;tmax为算法最大迭代次数。
在开发阶段捕杀猎物时,座头鲸使用螺旋方程来更新与猎物之间的位置。由于收缩包围与螺旋更新位置优先级相同,需假定概率P与1-Pi来对两者进行选择:

其中:Dp=为鲸鱼个体之间的距离;l为螺线形状系数;b为区间(-1,1)的随机数。
2.2 极限学习机
极限学习机不同于传统神经网络,无需预先设置参数,属于新型的单层前馈神经网络算法。该算法由Huang等[20]提出,是一种简单有效的训练学习算法,具有网络结构简单、计算速度快等优势。

目标函数等价于使得输出的误差最小,可表示为

即存在βi、Wi和bi,使得

用矩阵表示为

其中:H为隐藏层节点的输出;β为输出权重,T为网络的目标输出。
在随机确定权重Wi和偏置bi后,则求解输出矩阵H可转化为求解Hβ=T最小范数的最小二乘解βT:

其中,H+为矩阵H的MP广义逆。
2.3 鲸鱼算法优化极限学习机
1)初始化极限学习机[21]的输入权值和隐藏层阈值,并将其作为WOA中鲸鱼的初始位置向量。
2)计算种群中的个体适应度,寻找到最佳鲸鱼个体,并记录当前最佳个体的位置。
3)若未满足迭代次数或最小适应度,则根据式(12)更新鲸鱼与目标之间的位置,进入下次迭代。
4)当满足条件时,保留当前最优鲸鱼个体位置,此时即得到ELM 模型的最优参数。
WOA-ELM 模型诊断流程如图4所示。
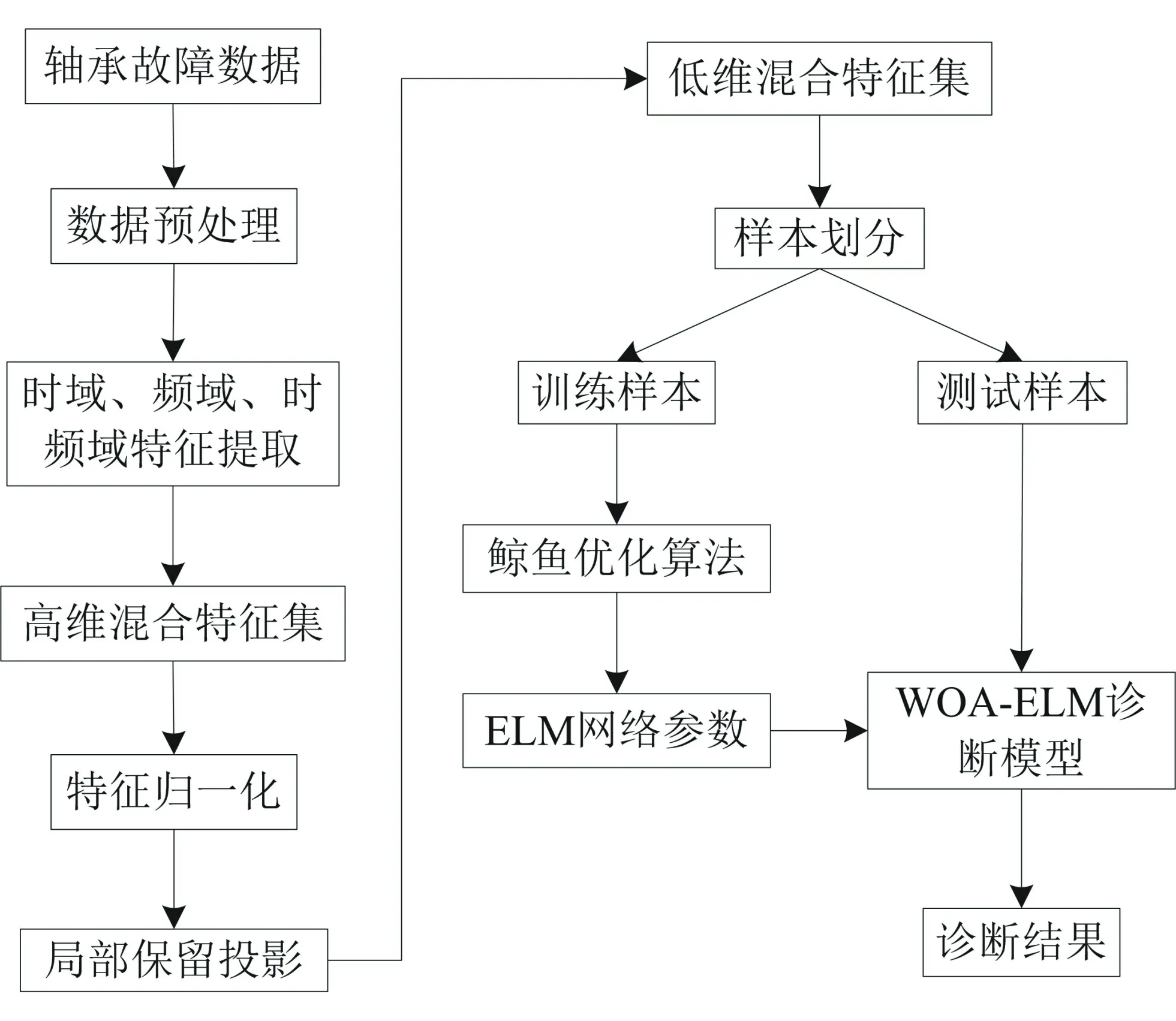
图4 WOA-ELM 模型诊断流程
3 实验分析
3.1 实验设置
实验采用美国凯斯西储大学提供的官方轴承分析数据。滚动轴承试验台由电机、轴承、转矩传感器、采集器和电子控制设备等部分构成,实验设备如图5所示。

图5 实验设备
实验所用数据由加速度传感器在轴承电机驱动端采集。电机转速为1 797 r/min,采样频率为12 k Hz。轴承内圈、滚动体及外圈的故障损伤直径分别为0.007、0.014及0.021 mm,故加上正常状态共有10种类型。为测试WOA-ELM 模型诊断不同故障直径的性能,将分类标签设置为10个,正常状态对应一个标签,其他3种故障分别对应3个标签,如表2所示。每个标签各选取100个样本,从中随机抽取70个样本,作为WOA-ELM 模型的训练样本,其余30个样本作为测试样本。
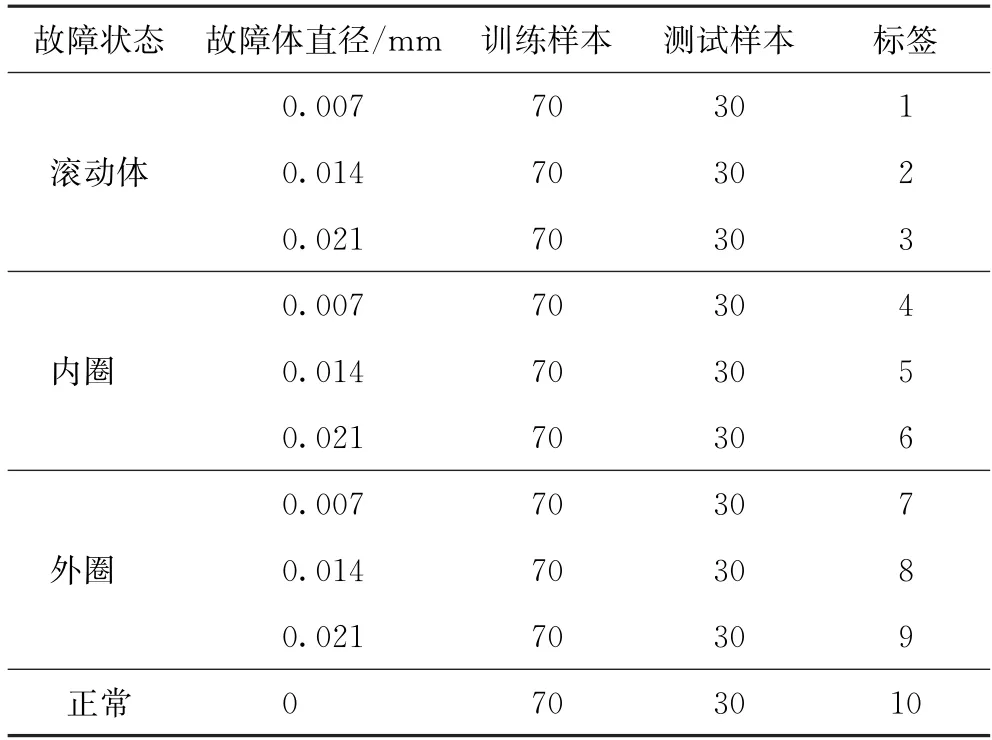
表2 样本划分
3.2 实验结果
在WOA-ELM 轴承诊断模型中,ELM 的传递函数使用Sigmoid函数,隐含层层数为200,鲸鱼种群设置为10,迭代次数为10。按表2的样本个数对WOA-ELM 模型进行训练和测试,其中训练样本为700个,测试样本为300个,模型诊断结果如图6所示,模型诊断错误率如图7所示。

图6 WOA-ELM 模型诊断结果

图7 WOA-ELM 模型诊断错误率
实验结果表明,基于三域特征提取的WOAELM 模型能对滚动轴承不同故障直径下的4种故障种类进行准确分类,诊断准确率为95.33%。从图7可看出,算法的收敛速度较快,在迭代到第5次时,适应度曲线趋于平稳。
为验证WOA-ELM 诊断模型的优势,通过引入BP神经网络和无优化的ELM 网络对混合特征集进行故障识别,按表2的样本个数分别对BP神经网络、无优化的ELM 网络进行训练和测试,BP、ELM的诊断结果分别为84.17%、86.67%。
由上述实验结果可知,基于三域特征提取和WOA-ELM 的诊断模型对混合特征集的诊断效果最好,在相同条件下,WOA-ELM 模型的诊断准确率分别比ELM 网络、BP神经网络高了8.66%、11.16%。
4 结束语
提出了一种三域特征提取和WOA-ELM 的滚动轴承故障诊断方法。针对振动信号的特征难以提取的问题,采用多特征融合的方法提取特征。对混合域特征集归一化处理,再进行维度简约,能够较好地包含信号的原始特征。通过鲸鱼算法的全局搜索能力,改善了极限学习机稳定性较差且易陷入局部最优的不足。实验结果表明,该模型能提高诊断精度,同时有良好的稳定性,诊断准确率达95.33%。该方法还未涉及到轴承退化状态的性能评估,今后将对此作进一步研究。
猜你喜欢
幼儿100(2022年41期)2022-11-24
成都信息工程大学学报(2021年1期)2021-07-22
成都信息工程大学学报(2021年1期)2021-07-22
数学大王·趣味逻辑(2020年9期)2020-09-06
原子与分子物理学报(2020年5期)2020-03-17
小天使·二年级语数英综合(2019年4期)2019-10-06
动漫星空(2018年4期)2018-10-26
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
火控雷达技术(2016年1期)2016-02-06
