
基于LPP-ABC-SVM的光伏阵列阴影遮挡分类方法研究
2022-02-14 09:05:20张治王悦王林
电气传动 2022年3期
张治 ,王悦 ,王林
(1.国家电投集团光伏产业创新中心,青海 西宁 810000;2.西安理工大学电子工程系,陕西 西安 710048)
光伏阵列是光伏发电过程中的重要组成部分,由于其长期处于室外,导致光伏系统的发电效率极易受到环境的影响。在光伏阵列运行过程中,阴影遮挡导致的最直接结果是输出曲线呈现多峰和多膝现象[1],由于光伏阵列在产生热斑故障时与阴影遮挡时在输出特征上有相似之处,因此可通过先识别阴影遮挡程度后再进一步分析是否存在热斑故障。此外,阴影遮挡会造成光伏阵列中电池片输出功率的不匹配,长期如此,便会损坏电池,影响光伏电站的发电性能。因此,对阴影遮挡的不同程度进行及时甄别,可达到预防热斑故障的目的,避免其对阵列本身造成损害,降低发电效率。
文献[2]提出一种基于参数识别的光伏阵列阴影分类方法,其通过混合RBF神经网络和人工鱼群算法,基于灰色预测得到光伏阵列的输出功率,进而判断出固定阴影遮挡和随机阴影遮挡。但该方法由于参数过多,导致计算量较大。文献[3]提出了基于电压扫描的光伏阵列阴影诊断策略,该方法通过扫描得到光伏阵列的I—V与P—V特性曲线,将其作为判断固定阴影和随机阴影的基础。此方法的局限性表现为对大规模电站进行监测时,需大量采集数据的传感器设备,硬件成本较高。文献[4]使用红外热成像法来判断阴影遮挡,根据光伏组件在各种工况下的温度改变情况来识别阵列中是否存在故障,同样地,运用该方法对大规模阵列使用高分辨率的热像仪时会导致成本过高。文献[5]通过对光伏阵列的I—V曲线与实测曲线进行比较,从而达到阴影判断的目的。但其需离线扫描,是以减少电站的发电量为代价的。此外,该方法响应相对滞后,不适用于对实时性要求较高的情况。文献[6]基于优化算法采用传统的BP神经网络智能方法对阴影故障进行了判别,但其存在易陷入局部最优问题。同时,该方法所需的诊断参数需在极端条件下获得,数据难以获取的同时也会给光伏电站的稳定安全运行带来隐患。
针对上述文献中存在的开路电压、短路电流等数据难以获取、采集设备成本高、传统智能分类算法易出现过拟合、耗时长等问题,提出了不依赖于大量环境参数的LPP-ABC-SVM方法对光伏阵列不同程度的阴影遮挡进行区分。其基于最大功率跟踪数据,使用局部保持投影(locality preserving projection,LPP)降维方法对高维度的数据特征进行降维和特征提取,得到低维度向量。利用支持向量机(support vector machine,SVM)对不同程度的阴影遮挡进行分类,支持向量机的参数采用人工蜂群算法(artificial bee colony,ABC)对其寻优,继而提高阵列的阴影遮挡分类准确率。通过仿真实验,证明了使用此方法的有效性和可行性。
1 LPP-ABC-SVM的分类策略
1.1 LPP降维方法原理
局部保持投影LPP降维方法属于拉普拉斯映射中的一种线性逼近法[7-8],其具有学习高维空间中样本局部邻域结构的能力,从而达到使用线性数据对非线性数据降维处理的目的。该方法通过建立高维数据空间,找出附近邻域数据样本间的关联关系,使高维空间的样本数据映射到低维空间中,同时不改变数据样本间的局部特征,从而达到对数据降维的目的[9]。

1.2 支持向量机原理
SVM方法主要用于模式识别、数据分类和预测回归等领域[10],其工作原理是将不同的样本通过比较,从而获得一个分类超平面。对于线性可分的两类问题,其求得一条分离线或分类平面;而对于非线性可分的问题,使用恰当的核函数使低维空间的各个输入点一一映射到某高维空间中,以便低维数据能够在高维空间中线性可分,进而得到基于线性可分的最优分类面。其中“最优”是指为了将不同的样本区分开,其分类间隔应该最大[11]。

1.3 人工蜂群算法原理
本文使用全局优化算法——ABC算法,对支持向量机的关键参数进行寻优操作。该算法旨在通过模拟自然界中蜜蜂群的行为来寻求各种问题的最优解。该算法由3种蜂群组成,分别为侦察蜂、守望蜂和受雇用蜂,蜂群的总数是被雇用的蜜蜂数量的2倍,被雇用的蜜蜂数等于食物来源的数量[12-13]。
1)初始化时,假设解的个数为SN,且解是随机产生的,食物来源的数量也为SN。初始解为
1.4 ABC-SVM模型的建立
本文建立ABC-SVM模型如下:
1)使用人工蜂群算法优化支持向量机的惩罚因子C和核函数宽度σ,蜂群参数为:食物来源=雇用蜂=侦察蜂=N=25,最大的食物来源次数和迭代次数分别为50和1 000[15]。
2)为提高分类准确率,可通过使用SVM分类错误率来计算适应度函数,即
式中:Vacc为分类正确率。
3)设置惩罚因子C为[10-1,103],核函数宽度r为[10-2,102]。
2 光伏阵列阴影遮挡分类策略
本文采用APM72M170W型号作为光伏阵列仿真模型,每20个电池片作为一个子阵列,且并联1个二极管,其中涉及到的电气参数如下:开路电压Voc=44.2 V,最大功率点电压Vmp=35.8 V,最大功率点功率Pmp=170 W,最大功率点电流Imp=4.75 A,短路电流Isc=5.05 A。
2.1 根据阴影遮挡的不同程度划分
以STC条件为标准,温度设置为25℃,分别将700 W/m2,400 W/m2作为轻度、中度阴影的上限,即表示3个光伏子阵列分别处于光照强度为700~1 000 ,400~1 000,100~1 000 W/m2的范围内,为更贴合实际情况,设置光照强度变步长分别为30 ,60 ,90 W/m2,其I—V,P—V输出特性与极值点分布情况如图1~图3所示。
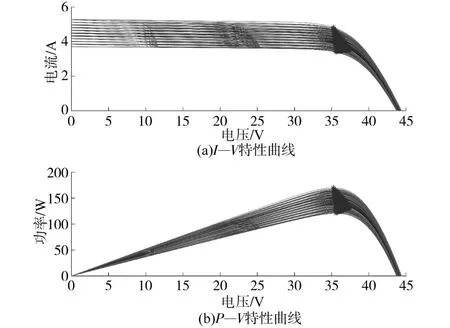
图1 轻度阴影遮挡的输出特性与极值点分布情况Fig.1 The output characteristics and extreme points distribution of light shadow occlusion

图2 中度阴影遮挡的输出特性与极值点分布情况Fig.2 The output characteristics and extreme points distribution of moderate shadow occlusion

图3 重度阴影遮挡的输出特性与极值点分布情况Fig.3 The output characteristics and extreme points distribution of severe shadow occlusion
由图1~图3可知,可根据最大功率点集中的不同区域与极值点的个数来实现对不同阴影遮挡程度进行分类。对本文而言,轻度、中度、重度阴影遮挡所对应的极值点个数分别为1,2,3,通过获得不同光照强度下的电压及其对应的最大功率数据,可实现对光伏阵列不同程度阴影遮挡情况的检测。
现将阵列阴影遮挡情况分为3种状况,分类依据如表1所示。

表1 光伏阵列阴影遮挡分类依据Tab.1 Classification basis of shadow occlusion of photovoltaic array
2.2 根据阴影的类型划分
根据阴影类型的不同进行划分,可将光伏阵列的阴影遮挡分为固定阴影遮挡和随机阴影遮挡。前者具有时不变性,而后者会根据时间、被挡面积等的变化而改变。
以STC条件为准则,温度定为25℃,设置的光照强度则根据光照强度范围100~900 W/m2,按照每个值相差100 W/m2的规律将其划分为9个值,并作为光伏阵列阴影固定遮挡的依据。通过不断改变光照强度来模拟被挡面积的变化,随机遮挡则以上述不同程度阴影遮挡下的遮挡策略为基础,对应其变步长分别将光照强度为900,700,400,700,900 W/m2的值作为随机阴影遮挡光照强度的上限。
3 阴影遮挡分类策略仿真验证
3.1 数据的获取
采用改进型变步长扰动观察法作为MPPT跟踪算法[16-17],依据上述表1中光照强度的改变来获取不同阴影遮挡状况下的电压和最大功率数据,3种不同程度阴影遮挡的部分数据分布如图4~图6所示。

图4 轻度阴影遮挡数据分布Fig.4 Distribution of light shadow occlusion data

图5 中度阴影遮挡数据分布Fig.5 Distribution of moderate shadow occlusion data

图6 重度阴影遮挡数据分布Fig.6 Distribution of severe shadow occlusion data
3.2 特征量的提取
使用LPP局部保持投影方法对取得的数据进行降维处理,根据所获取的数据维度为并联二极管个数的2倍,采用LPP方法对其降维,即舍弃无效的电压和功率数据10%的信息,表示如下:

式中:V1mp为电压极值点数据1,V2mp为电压极值点数据2,V3mp为电压极值点数据3;P1mp为功率极值点数据1,P2mp为功率极值点数据2,P3mp为功率极值点数据3。
其重要方向参数为

3.3 仿真结果
将得到的不同阴影遮挡下的功率及电压数据总样本随机分为测试集和训练集,分别使用BP神经网络方法、SVM方法和本文提出的LPPABC-SVM方法来对不同阴影遮挡程度下的训练集和测试集进行训练和测试。该阴影遮挡分类策略下的BP神经网络模型结构共有3层,分别为输入层、隐含层和输出层[18]。将电压和功率数据表示为输入向量X1~X6,并将3种不同程度的阴影遮挡表示为输出向量Y1~Y3。其中隐含层节点的选取可参考如下公式在该式中,L表示为隐含层节点个数,M表示为输入向量个数,N表示为输出向量个数,θ为1~10之间的常数。
多次试验结果表明,BP神经网络隐含层节点的个数为9时,网络性能最好,其部分训练样本如表2所示。

表2 BP神经网络的训练样本Tab.2 Training samples of BP neural network
在经过1 000次训练以后,BP神经网络的分类性能已经基本达到了要求,输出样本的分类结果如表3所示。

表3 BP神经网络的分类结果Tab.3 BP neural network classification results
BP神经网络的分类总体辨识准确率为81.31%,分析表3中的数据,神经网络的输出结果与预定义的不同阴影遮挡程度下的输出结果表现基本是一致的,证实了将其应用于光伏阵列的阴影遮挡分类中是可行的。
此外,本文使用泛化性能较高的RBF函数作为SVM的核函数,惩罚参数C=16,核函数宽度r=1.9。
为表明本文所提方法的优越性,将上述前两种方法作为参照,得到的不同训练比例下不同阴影遮挡程度的状况总体趋势和分类准确率如图7~图9所示。

图7 BP神经网络算法下不同阴影遮挡程度的总体趋势Fig.7 The overall trend of different shadow occlusion degrees under BP neural network algorithm
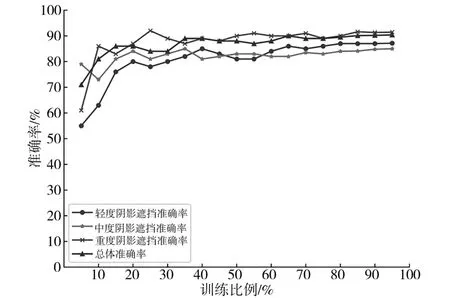
图8 SVM算法下不同阴影遮挡程度的总体趋势Fig.8 The overall trend of different shadow occlusion degrees under SVM algorithm
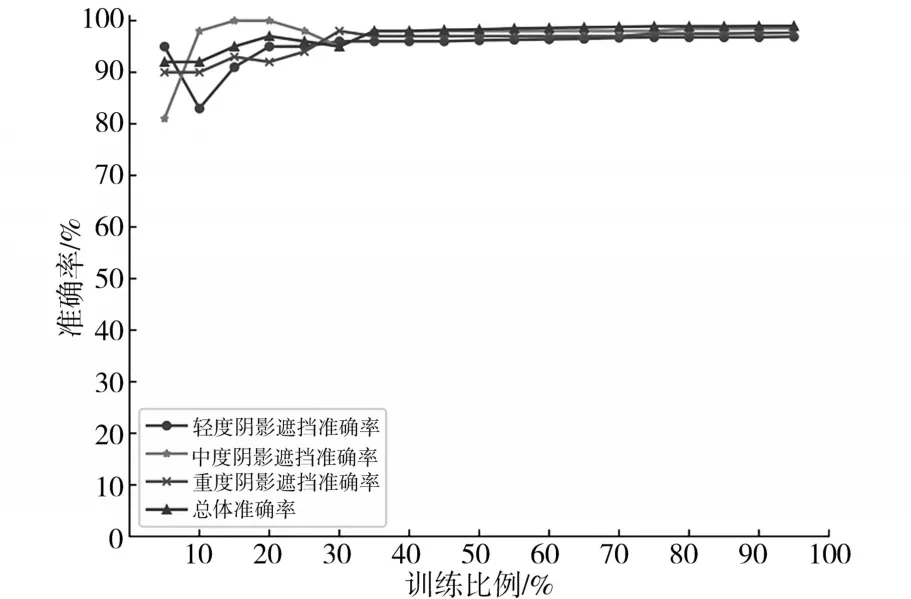
图9 LPP-ABC-SVM算法下不同阴影遮挡程度的总体趋势Fig.9 The overall trend of different shadow occlusion degrees under LPP-ABC-SVM algorithm
由图7~图9可知,当训练集比例达到95%时,BP神经网络的分类正确率远远小于其它两种方法。此时,采用三种方法的测试集分类结果如图10所示。比较上述各个方法在速度和准确率方面的性能,性能对比结果如表4所示。由表4可知,分别使用BP神经网络方法、SVM方法和本文提出的LPP-ABC-SVM方法应用于按照不同类型划分的阴影遮挡分类中,其分类准确率相较于按照不同阴影遮挡程度划分的准确率整体有所提高,同时,本文所提方法的分类表现优于SVM方法与BP神经网络方法。

图10 三种方法下不同阴影遮挡程度的分类结果对比图Fig.10 Comparison of the classification results of different shadow occlusion degrees under three methods

表4 对不同程度阴影遮挡的分类方法性能对比Tab.4 Performance comparison of classification methods for different degrees of shadow occlusion
基于固定阴影遮挡和随机阴影遮挡的三种分类算法的测试分类结果表现也较为一致,如表5所示。

表5 对不同类型阴影遮挡的分类方法对比Tab.5 Comparison of classification methods for different types of shadow occlusion.
使用上述三种方法将阴影遮挡分为固定阴影遮挡与随机阴影遮挡,其中BP神经网络方法的总体分类正确数占总样本数量的90.15%,SVM方法的分类正确数占总样本数量的94.33%,而应用本文的LPP-ABC-SVM方法在对阴影遮挡进行分类时,其分类表现更加优异,分类的正确数占总体样本数量的98.84%。
采用上述三种方法,基于固定阴影遮挡与随机阴影遮挡2种遮挡的测试集分类结果图如图11所示。
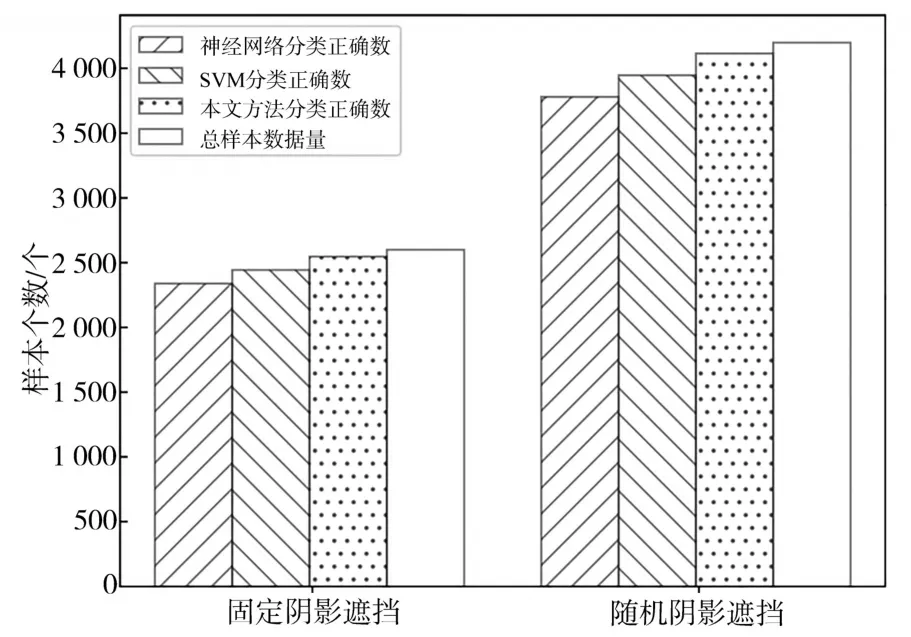
图11 三种方法下不同类型阴影遮挡分类结果图Fig.11 Classification results of different types of shadow under three methods
经过上述对比可知,使用BP神经网络对光伏阵列的阴影遮挡分类在准确率上较为一般,由于其自身的局限性导致速度较慢,在三种方法中消耗时间最长。而SVM方法的分类性能较前者良好,消耗时间短,算法的快速性表现较好。本文提出的LPP-ABC-SVM方法是在SVM算法的基础上,对其关键参数使用人工蜂群算法进行寻优操作,大大提高了算法的正确率,消耗时间与SVM算法相比持平。随着串联子阵列的增加,采用LPP方法在分类速度上的优势逐渐凸显。可见,本文提出的阴影遮挡分类算法在准确率和实现速度上表现较为优越,从而验证了该方法的实用性和可行性。
4 结论
为了有效预防热斑故障的产生,需要及时甄别光伏阵列的不同阴影遮挡状况。
本文提出基于LPP-ABC-SVM的光伏阵列阴影遮挡分类方法以最大功率及电压数据作为输入数据,大大节省了数据获取成本;采用LPP局部保持投影方法降低了数据维度,减小了运算数据量;ABC-SVM算法的应用,提高了对光伏阵列的阴影遮挡情况的分类准确率,有效解决了使用传统智能算法时出现的训练耗时长、易过拟合等问题。
仿真结果表明,使用所提方法可高效快速地实现对光伏阵列不同阴影程度及类型的分类,从而为预防光伏电站的热斑故障奠定了重要基础。
猜你喜欢
新世纪智能(数学备考)(2021年10期)2021-12-21 06:20:38
健康之家(2021年19期)2021-05-23 11:17:39
医学食疗与健康(2021年27期)2021-05-13 18:46:23
农业科技与信息(2021年2期)2021-03-27 07:27:38
河北理科教学研究(2020年3期)2021-01-04 01:49:40
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
中学数学杂志(2019年1期)2019-04-03 00:35:46
中国交通信息化(2018年5期)2018-08-21 03:37:40
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
